#include <idle_thread.h>
Public Types | |
| using | interface_t = IdleController |
 Public Types inherited from IIdleController Public Types inherited from IIdleController | |
| enum class | Phase : uint8_t { Cranking , Idling , Coasting , CrankToIdleTaper , Running } |
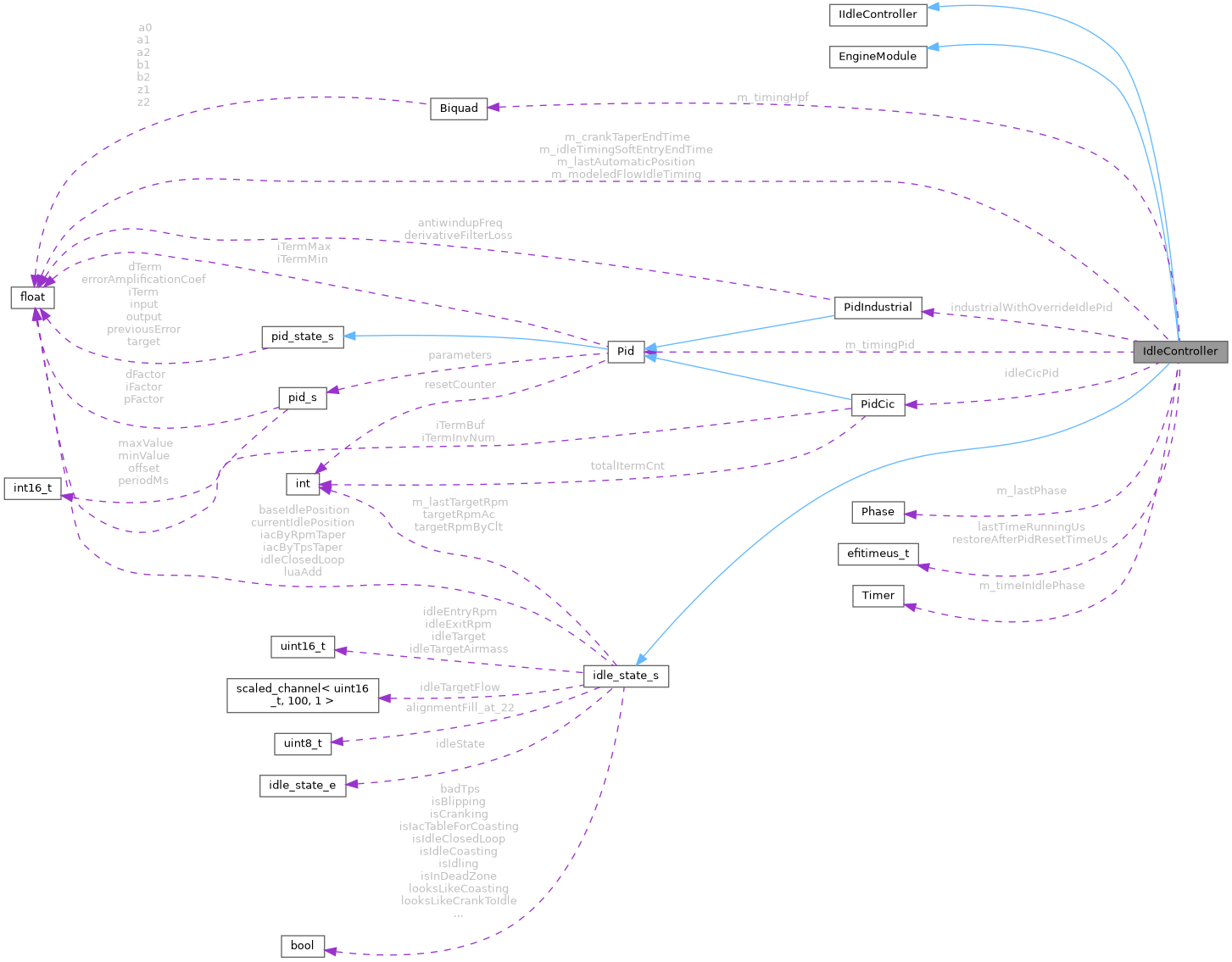
Private Attributes | |
| Phase | m_lastPhase = Phase::Cranking |
| efitimeus_t | restoreAfterPidResetTimeUs = 0 |
| efitimeus_t | lastTimeRunningUs = 0 |
| float | m_crankTaperEndTime = 0.0f |
| float | m_idleTimingSoftEntryEndTime = 0.0f |
| Timer | m_timeInIdlePhase |
| float | m_lastAutomaticPosition = 0 |
| Pid | m_timingPid |
| float | m_modeledFlowIdleTiming = 0 |
| Biquad | m_timingHpf |
Detailed Description
Definition at line 56 of file idle_thread.h.
Member Typedef Documentation
◆ interface_t
Definition at line 59 of file idle_thread.h.
Member Function Documentation
◆ determinePhase()
|
overridevirtual |
Implements IIdleController.
Definition at line 61 of file idle_thread.cpp.
Referenced by getIdlePosition().


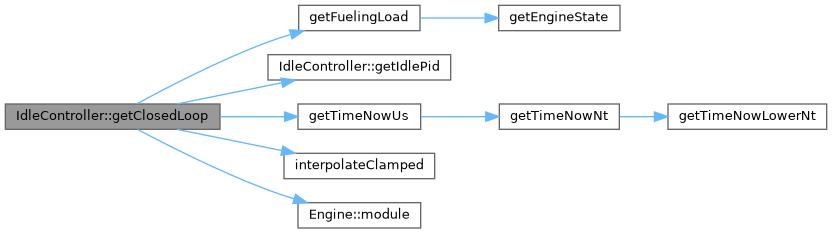
◆ getClosedLoop()
|
overridevirtual |
- Returns
- idle valve position percentage for automatic closed loop mode
Implements IIdleController.
Definition at line 244 of file idle_thread.cpp.
Referenced by getIdlePosition().

◆ getCrankingOpenLoop()
Implements IIdleController.
Definition at line 119 of file idle_thread.cpp.
Referenced by getOpenLoop().


◆ getCrankingTaperFraction()
Implements IIdleController.
Definition at line 114 of file idle_thread.cpp.
Referenced by getIdlePosition().

◆ getCurrentPhase()
|
inlineoverridevirtual |
Implements IIdleController.
Definition at line 96 of file idle_thread.h.
Referenced by LongTermIdleTrim::update().

◆ getIdlePid()
|
inline |
Definition at line 107 of file idle_thread.h.
Referenced by applyPidSettings(), getClosedLoop(), getIdlePosition(), init(), onConfigurationChange(), and onEngineStop().

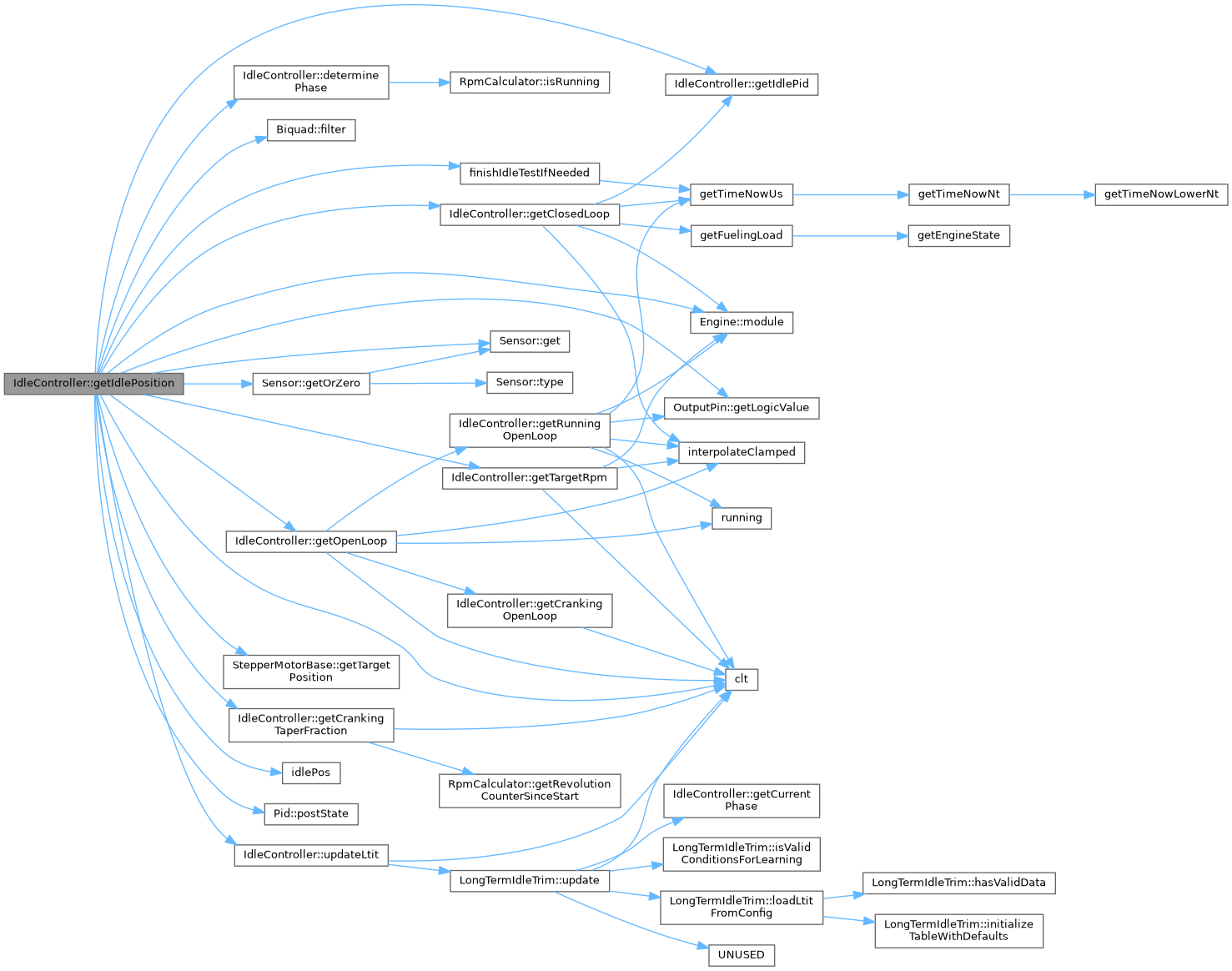
◆ getIdlePosition()
Definition at line 336 of file idle_thread.cpp.
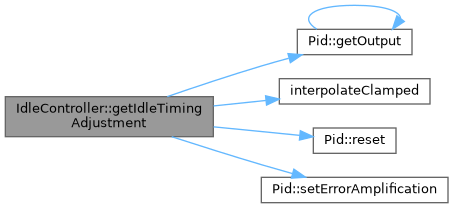
◆ getIdleTimingAdjustment() [1/2]
Implements IIdleController.
Definition at line 207 of file idle_thread.cpp.
Referenced by getIdleTimingAdjustment().


◆ getIdleTimingAdjustment() [2/2]
Definition at line 211 of file idle_thread.cpp.
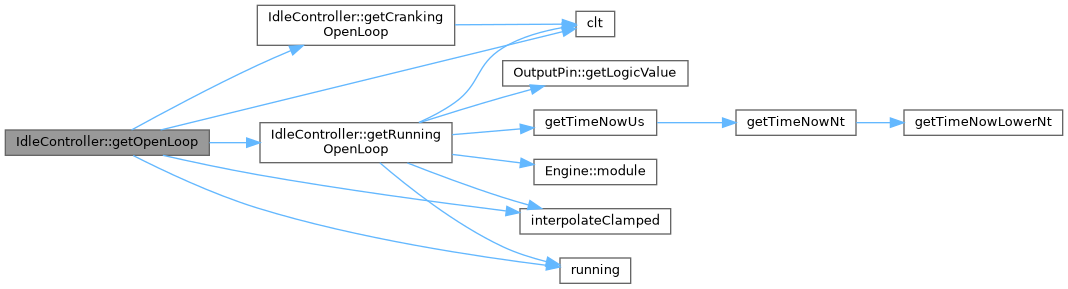
◆ getOpenLoop()
|
overridevirtual |
Implements IIdleController.
Definition at line 183 of file idle_thread.cpp.
Referenced by getIdlePosition().

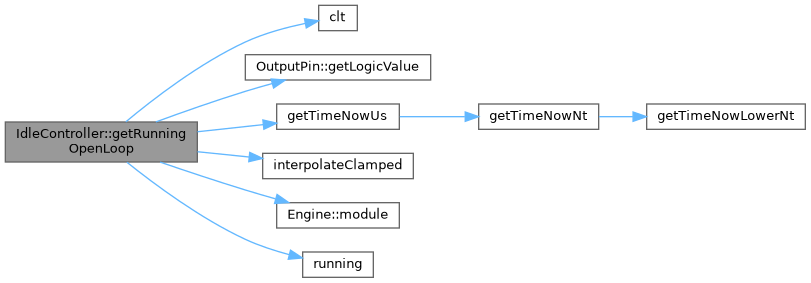
◆ getRunningOpenLoop()
|
overridevirtual |
Implements IIdleController.
Definition at line 123 of file idle_thread.cpp.
Referenced by getOpenLoop().

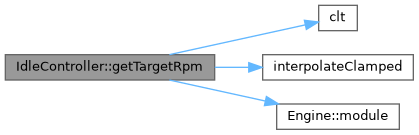
◆ getTargetRpm()
|
overridevirtual |
Implements IIdleController.
Definition at line 27 of file idle_thread.cpp.
Referenced by getIdlePosition().

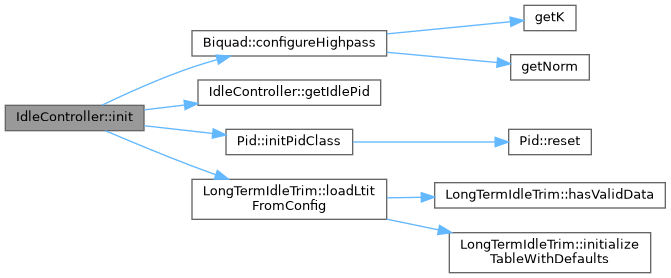
◆ init()
| void IdleController::init | ( | ) |
Definition at line 473 of file idle_thread.cpp.
Referenced by startIdleThread().

◆ isCoastingAdvance()
|
inlineoverridevirtual |
Implements IIdleController.
Definition at line 92 of file idle_thread.h.
Referenced by getRunningAdvance().

◆ isIdlingOrTaper()
|
inlineoverridevirtual |
Implements IIdleController.
Definition at line 88 of file idle_thread.h.
Referenced by getRunningAdvance(), and AirmassVeModelBase::getVe().

◆ onConfigurationChange()
|
finaloverridevirtual |
Reimplemented from EngineModule.
Definition at line 466 of file idle_thread.cpp.

◆ onEngineStop()
|
finaloverridevirtual |
Reimplemented from EngineModule.
Definition at line 462 of file idle_thread.cpp.

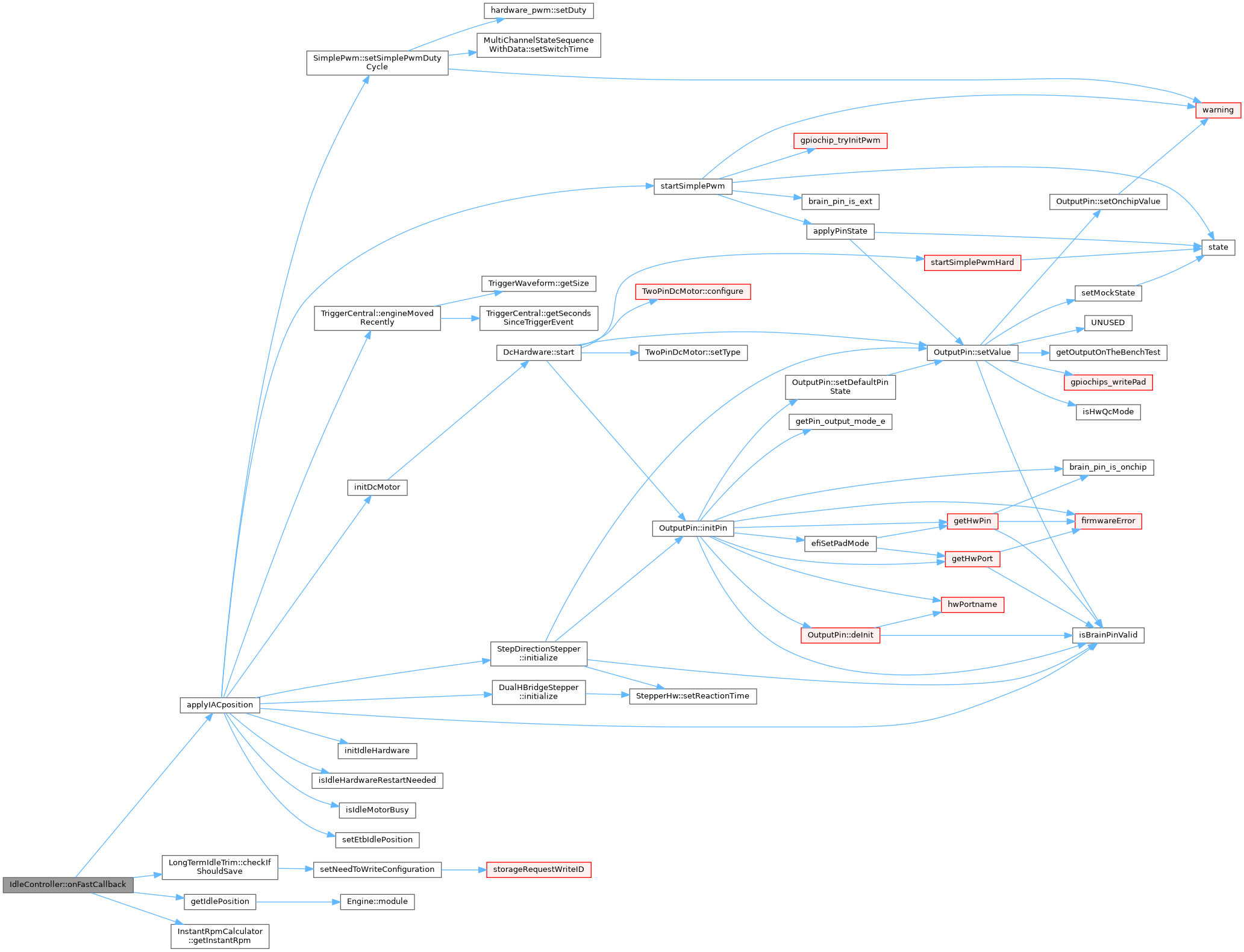
◆ onFastCallback()
|
finaloverridevirtual |
Reimplemented from EngineModule.
Definition at line 453 of file idle_thread.cpp.
◆ onIgnitionStateChanged()
|
overridevirtual |
Reimplemented from EngineModule.
Definition at line 489 of file idle_thread.cpp.

◆ updateLtit()
| void IdleController::updateLtit | ( | float | rpm, |
| float | clt, | ||
| bool | acActive, | ||
| bool | fan1Active, | ||
| bool | fan2Active, | ||
| float | idleIntegral | ||
| ) |
Definition at line 483 of file idle_thread.cpp.
Referenced by getIdlePosition().


Field Documentation
◆ idleCicPid
| PidCic IdleController::idleCicPid |
Definition at line 104 of file idle_thread.h.
Referenced by getIdlePid().
◆ industrialWithOverrideIdlePid
| PidIndustrial IdleController::industrialWithOverrideIdlePid |
Definition at line 100 of file idle_thread.h.
Referenced by getClosedLoop(), and getIdlePid().
◆ lastTimeRunningUs
|
private |
Definition at line 125 of file idle_thread.h.
Referenced by getRunningOpenLoop().
◆ m_crankTaperEndTime
|
private |
Definition at line 127 of file idle_thread.h.
Referenced by determinePhase(), and getIdleTimingAdjustment().
◆ m_idleTimingSoftEntryEndTime
|
private |
Definition at line 128 of file idle_thread.h.
Referenced by determinePhase(), and getIdleTimingAdjustment().
◆ m_lastAutomaticPosition
|
private |
Definition at line 133 of file idle_thread.h.
Referenced by getClosedLoop().
◆ m_lastPhase
|
private |
Definition at line 122 of file idle_thread.h.
Referenced by getCurrentPhase(), getIdlePosition(), getIdleTimingAdjustment(), isCoastingAdvance(), and isIdlingOrTaper().
◆ m_modeledFlowIdleTiming
|
private |
Definition at line 136 of file idle_thread.h.
Referenced by getIdlePosition(), and getIdleTimingAdjustment().
◆ m_timeInIdlePhase
|
private |
Definition at line 130 of file idle_thread.h.
Referenced by getIdlePosition(), and getTargetRpm().
◆ m_timingHpf
|
private |
Definition at line 137 of file idle_thread.h.
Referenced by getIdlePosition(), and init().
◆ m_timingPid
|
private |
Definition at line 135 of file idle_thread.h.
Referenced by getIdleTimingAdjustment(), and init().
◆ restoreAfterPidResetTimeUs
|
private |
Definition at line 123 of file idle_thread.h.
Referenced by getClosedLoop().
The documentation for this class was generated from the following files:
- controllers/actuators/idle_thread.h
- controllers/actuators/idle_thread.cpp