#include <biquad.h>
Public Member Functions | |
| Biquad () | |
| float | filter (float input) |
| void | reset () |
| void | cookSteadyState (float steadyStateInput) |
| void | configureBandpass (float samplingFrequency, float centerFrequency, float Q) |
| void | configureLowpass (float samplingFrequency, float cutoffFrequency, float Q=0.54f) |
| void | configureHighpass (float samplingFrequency, float cutoffFrequency, float Q=0.54f) |
Private Attributes | |
| float | a0 |
| float | a1 |
| float | a2 |
| float | b1 |
| float | b2 |
| float | z1 |
| float | z2 |
Detailed Description
Constructor & Destructor Documentation
◆ Biquad()
| Biquad::Biquad | ( | ) |
Definition at line 12 of file biquad.cpp.

Member Function Documentation
◆ configureBandpass()
Definition at line 32 of file biquad.cpp.
Referenced by initSoftwareKnock().

◆ configureHighpass()
Definition at line 61 of file biquad.cpp.
Referenced by IdleController::init().

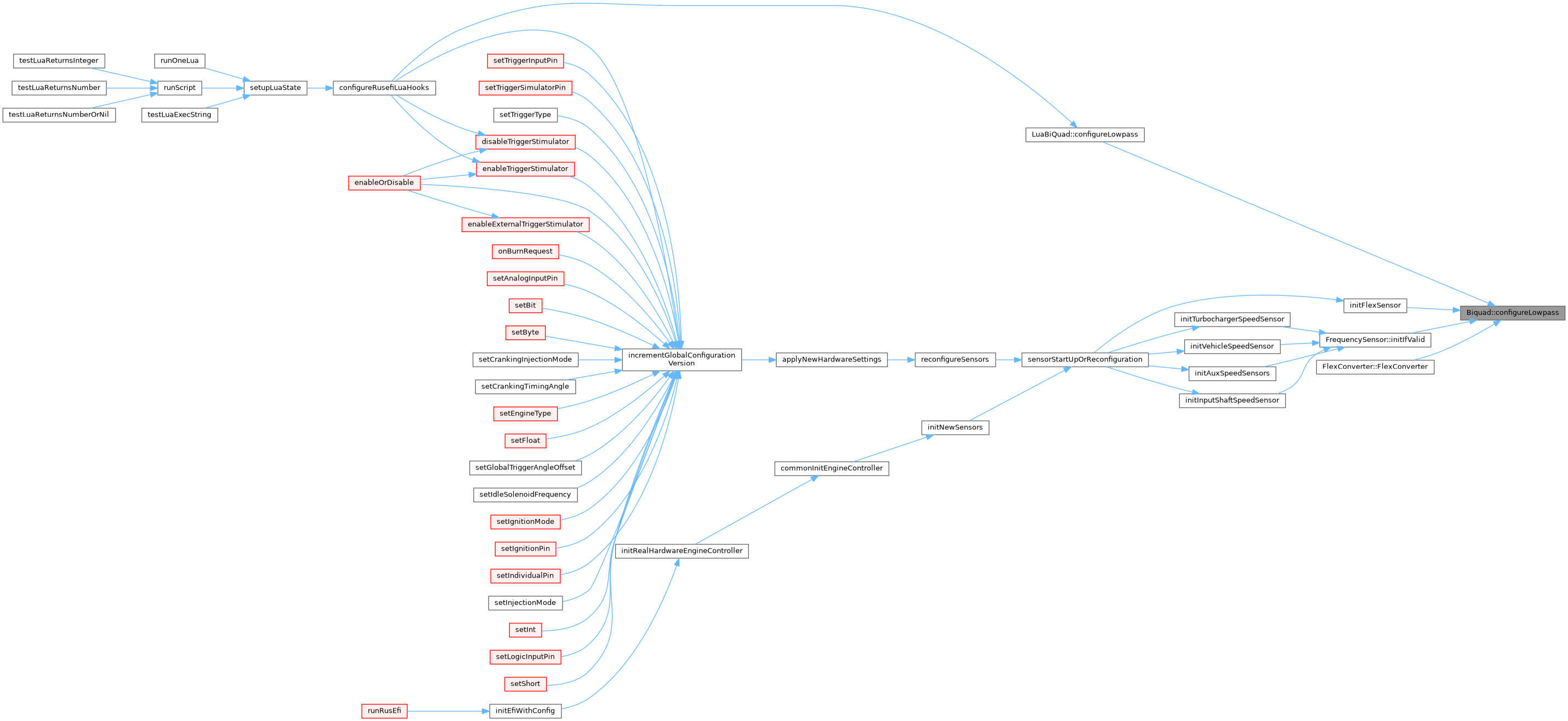
◆ configureLowpass()
Definition at line 48 of file biquad.cpp.
Referenced by LuaBiQuad::configureLowpass(), FlexConverter::FlexConverter(), initFlexSensor(), and FrequencySensor::initIfValid().
◆ cookSteadyState()
| void Biquad::cookSteadyState | ( | float | steadyStateInput | ) |
Definition at line 84 of file biquad.cpp.
Referenced by LuaBiQuad::filter(), processLastKnockEvent(), and AdcSubscription::UpdateSubscribers().

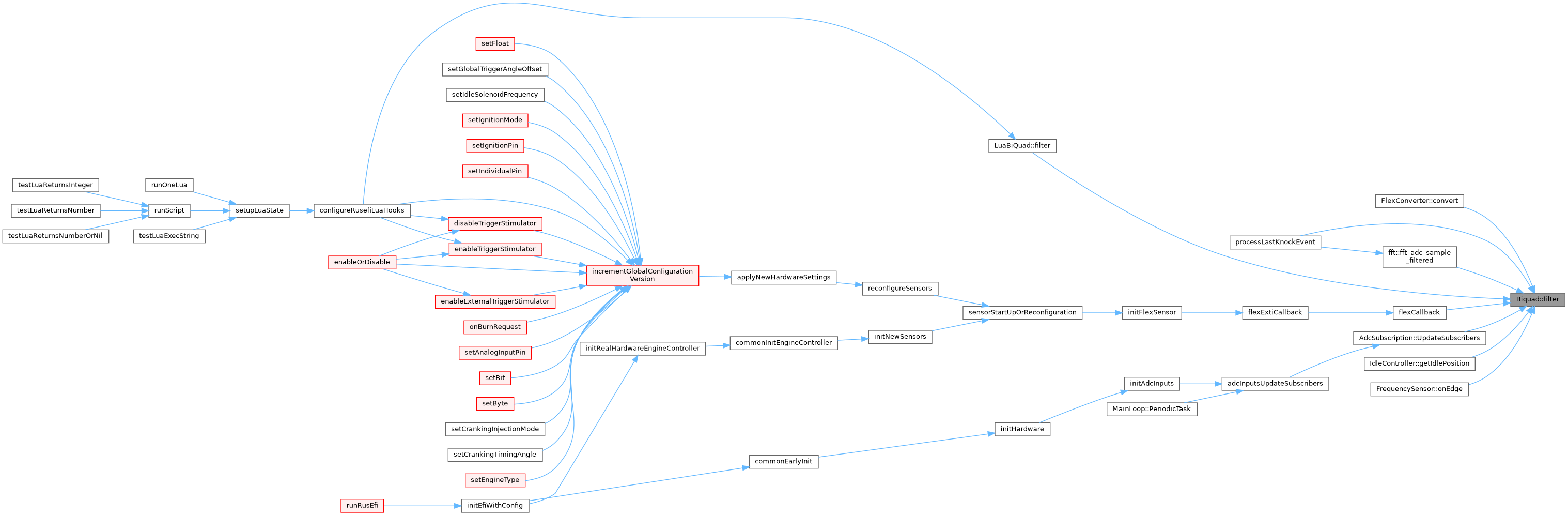
◆ filter()
Definition at line 74 of file biquad.cpp.
Referenced by FlexConverter::convert(), fft::fft_adc_sample_filtered(), LuaBiQuad::filter(), flexCallback(), IdleController::getIdlePosition(), FrequencySensor::onEdge(), processLastKnockEvent(), and AdcSubscription::UpdateSubscribers().
◆ reset()
| void Biquad::reset | ( | ) |
Definition at line 20 of file biquad.cpp.
Referenced by Biquad().

Field Documentation
◆ a0
|
private |
Definition at line 26 of file biquad.h.
Referenced by Biquad(), configureBandpass(), configureHighpass(), configureLowpass(), cookSteadyState(), and filter().
◆ a1
|
private |
Definition at line 26 of file biquad.h.
Referenced by Biquad(), configureBandpass(), configureHighpass(), configureLowpass(), cookSteadyState(), and filter().
◆ a2
|
private |
Definition at line 26 of file biquad.h.
Referenced by Biquad(), configureBandpass(), configureHighpass(), configureLowpass(), cookSteadyState(), and filter().
◆ b1
|
private |
Definition at line 26 of file biquad.h.
Referenced by Biquad(), configureBandpass(), configureHighpass(), configureLowpass(), cookSteadyState(), and filter().
◆ b2
|
private |
Definition at line 26 of file biquad.h.
Referenced by Biquad(), configureBandpass(), configureHighpass(), configureLowpass(), cookSteadyState(), and filter().
◆ z1
|
private |
Definition at line 27 of file biquad.h.
Referenced by cookSteadyState(), filter(), and reset().
◆ z2
|
private |
Definition at line 27 of file biquad.h.
Referenced by cookSteadyState(), filter(), and reset().
The documentation for this class was generated from the following files:
- util/math/biquad.h
- util/math/biquad.cpp