#include <stepper.h>


Public Member Functions | |
| virtual void | initialize (StepperHw *hardware, int totalSteps) |
| void | doIteration () |
| void | setTargetPosition (float targetPositionSteps) |
| float | getTargetPosition () const |
| bool | isBusy () const |
Data Fields | |
| int | m_currentPosition = 0 |
| int | m_totalSteps = 0 |
Protected Member Functions | |
| void | setInitialPosition (void) |
| void | saveStepperPos (int pos) |
| int | loadStepperPos () |
| void | changeCurrentPosition (bool positive) |
| void | postCurrentPosition (void) |
Protected Attributes | |
| StepperHw * | m_hw = nullptr |
| float | m_targetPosition = 0 |
| bool | initialPositionSet = false |
| bool | m_isBusy = false |
Detailed Description
Member Function Documentation
◆ changeCurrentPosition()
|
protected |
Definition at line 51 of file stepper.cpp.
Referenced by doIteration(), and setInitialPosition().


◆ doIteration()
| void StepperMotorBase::doIteration | ( | ) |
Definition at line 125 of file stepper.cpp.
Referenced by StepperMotor::ThreadTask().


◆ getTargetPosition()
| float StepperMotorBase::getTargetPosition | ( | ) | const |
Definition at line 14 of file stepper.cpp.
Referenced by doIteration(), and IdleController::getIdlePosition().

◆ initialize()
|
virtual |
Reimplemented in StepperMotor.
Definition at line 26 of file stepper.cpp.
Referenced by StepperMotor::initialize().

◆ isBusy()
| bool StepperMotorBase::isBusy | ( | ) | const |
Definition at line 161 of file stepper.cpp.
◆ loadStepperPos()
|
protected |
Definition at line 43 of file stepper.cpp.
Referenced by setInitialPosition().


◆ postCurrentPosition()
|
protected |
Definition at line 60 of file stepper.cpp.
Referenced by changeCurrentPosition(), and saveStepperPos().

◆ saveStepperPos()
|
protected |
Definition at line 35 of file stepper.cpp.
Referenced by doIteration(), and setInitialPosition().


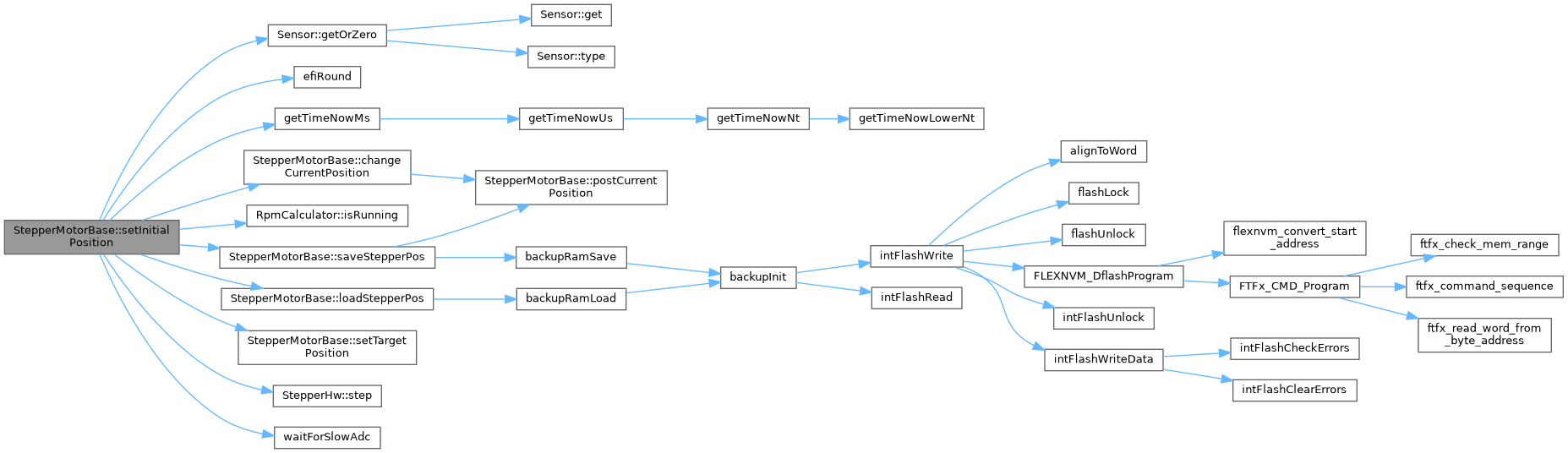
◆ setInitialPosition()
|
protected |
let's park the motor in a known position to begin with
I believe it's safer to retract the valve for parking - at least on a bench I've seen valves disassembling themselves while pushing too far out.
Add extra steps to compensate step skipping by some old motors.
Definition at line 68 of file stepper.cpp.
Referenced by doIteration().

◆ setTargetPosition()
| void StepperMotorBase::setTargetPosition | ( | float | targetPositionSteps | ) |
Definition at line 18 of file stepper.cpp.
Referenced by setInitialPosition().

Field Documentation
◆ initialPositionSet
|
protected |
Definition at line 91 of file stepper.h.
Referenced by doIteration(), and setInitialPosition().
◆ m_currentPosition
| int StepperMotorBase::m_currentPosition = 0 |
Definition at line 76 of file stepper.h.
Referenced by changeCurrentPosition(), doIteration(), postCurrentPosition(), and setInitialPosition().
◆ m_hw
|
protected |
Definition at line 88 of file stepper.h.
Referenced by doIteration(), initialize(), setInitialPosition(), and StepperMotor::ThreadTask().
◆ m_isBusy
|
protected |
Definition at line 92 of file stepper.h.
Referenced by doIteration(), and isBusy().
◆ m_targetPosition
|
protected |
Definition at line 90 of file stepper.h.
Referenced by getTargetPosition(), and setTargetPosition().
◆ m_totalSteps
| int StepperMotorBase::m_totalSteps = 0 |
Definition at line 77 of file stepper.h.
Referenced by initialize(), and setInitialPosition().
The documentation for this class was generated from the following files:
- hw_layer/stepper.h
- hw_layer/stepper.cpp