#include <stepper.h>
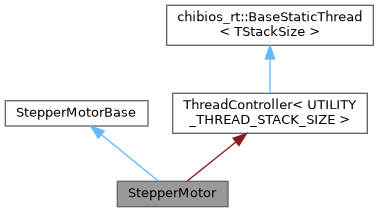
Inheritance diagram for StepperMotor:
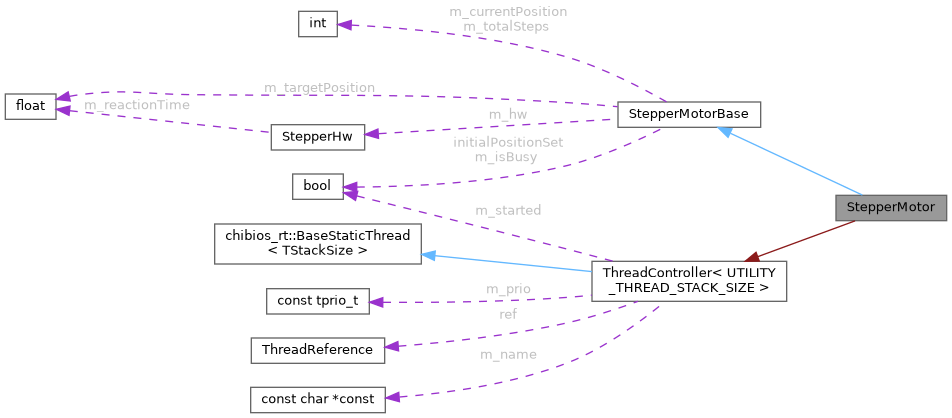
Collaboration diagram for StepperMotor:
Public Member Functions | |
| StepperMotor () | |
| void | initialize (StepperHw *hardware, int totalSteps) |
| void | ThreadTask () override |
 Public Member Functions inherited from StepperMotorBase Public Member Functions inherited from StepperMotorBase | |
| void | doIteration () |
| void | setTargetPosition (float targetPositionSteps) |
| float | getTargetPosition () const |
| bool | isBusy () const |
Additional Inherited Members | |
| Data Fields inherited from StepperMotorBase | |
| int | m_currentPosition = 0 |
| int | m_totalSteps = 0 |
| Protected Member Functions inherited from StepperMotorBase | |
| void | setInitialPosition (void) |
| void | saveStepperPos (int pos) |
| int | loadStepperPos () |
| void | changeCurrentPosition (bool positive) |
| void | postCurrentPosition (void) |
| Protected Attributes inherited from StepperMotorBase | |
| StepperHw * | m_hw = nullptr |
| float | m_targetPosition = 0 |
| bool | initialPositionSet = false |
| bool | m_isBusy = false |
| Private Member Functions inherited from ThreadController< UTILITY_THREAD_STACK_SIZE > | |
| ThreadController (const char *name, tprio_t priority) | |
| void | start () |
| Start the thread. | |
| void | stop () |
| Request thread termination and waits for termination. | |
| void | main () override |
| Private Attributes inherited from ThreadController< UTILITY_THREAD_STACK_SIZE > | |
| const char *const | m_name |
Detailed Description
Constructor & Destructor Documentation
◆ StepperMotor()
|
inline |
Definition at line 99 of file stepper.h.
A base class for a controller that requires its own thread.
Definition thread_controller.h:19
Member Function Documentation
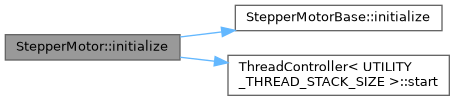
◆ initialize()
|
virtual |
Reimplemented from StepperMotorBase.
Definition at line 211 of file stepper.cpp.
211 {
212 StepperMotorBase::initialize(hardware, totalSteps);
213
214 start();
215}
virtual void initialize(StepperHw *hardware, int totalSteps)
Definition stepper.cpp:26
Here is the call graph for this function:
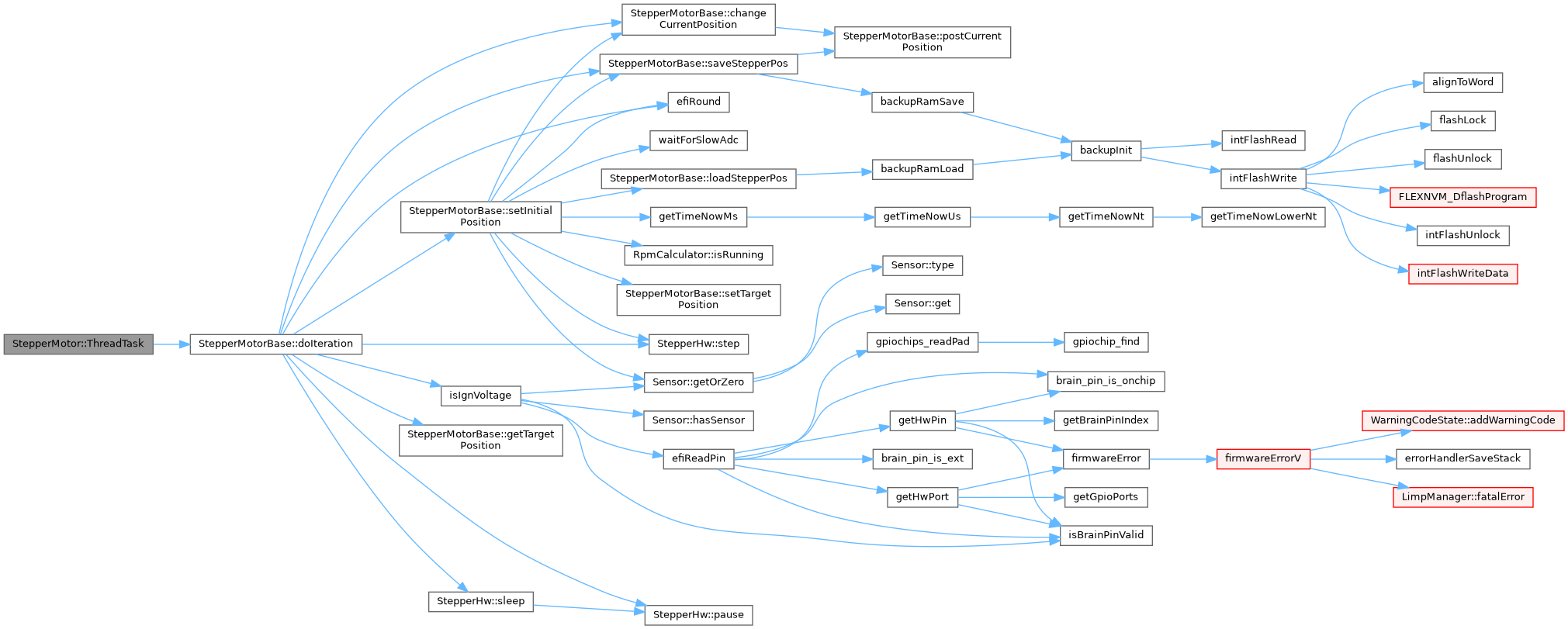
◆ ThreadTask()
|
inlineoverridevirtual |
Implements ThreadController< UTILITY_THREAD_STACK_SIZE >.
Definition at line 103 of file stepper.h.
103 {
104 // Require hardware to be set
106 return;
107 }
108
109 while (true) {
110 doIteration();
111 }
112 }
Here is the call graph for this function:
The documentation for this class was generated from the following files:
- hw_layer/stepper.h
- hw_layer/stepper.cpp