#include <instant_rpm_calculator.h>
Public Member Functions | |
| InstantRpmCalculator () | |
| float | getInstantRpm () const |
| void | updateInstantRpm (uint32_t current_index, TriggerWaveform const &triggerShape, TriggerFormDetails *triggerFormDetails, uint32_t index, efitick_t nowNt) |
| void | setLastEventTimeForInstantRpm (efitick_t nowNt) |
| void | movePreSynchTimestamps () |
| void | resetInstantRpm () |
Data Fields | |
| uint32_t | timeOfLastEvent [PWM_PHASE_MAX_COUNT] |
| size_t | spinningEventIndex = 0 |
| uint32_t | spinningEvents [120] |
| float | instantRpmValue [PWM_PHASE_MAX_COUNT] |
| float | prevInstantRpmValue = 0 |
| float | m_instantRpm = 0 |
Private Member Functions | |
| float | calculateInstantRpm (TriggerWaveform const &triggerShape, TriggerFormDetails *triggerFormDetails, uint32_t index, efitick_t nowNt) |
Private Attributes | |
| float | m_instantRpmRatio = 0 |
Detailed Description
Definition at line 8 of file instant_rpm_calculator.h.
Constructor & Destructor Documentation
◆ InstantRpmCalculator()
| InstantRpmCalculator::InstantRpmCalculator | ( | ) |
Definition at line 16 of file instant_rpm_calculator.cpp.
Member Function Documentation
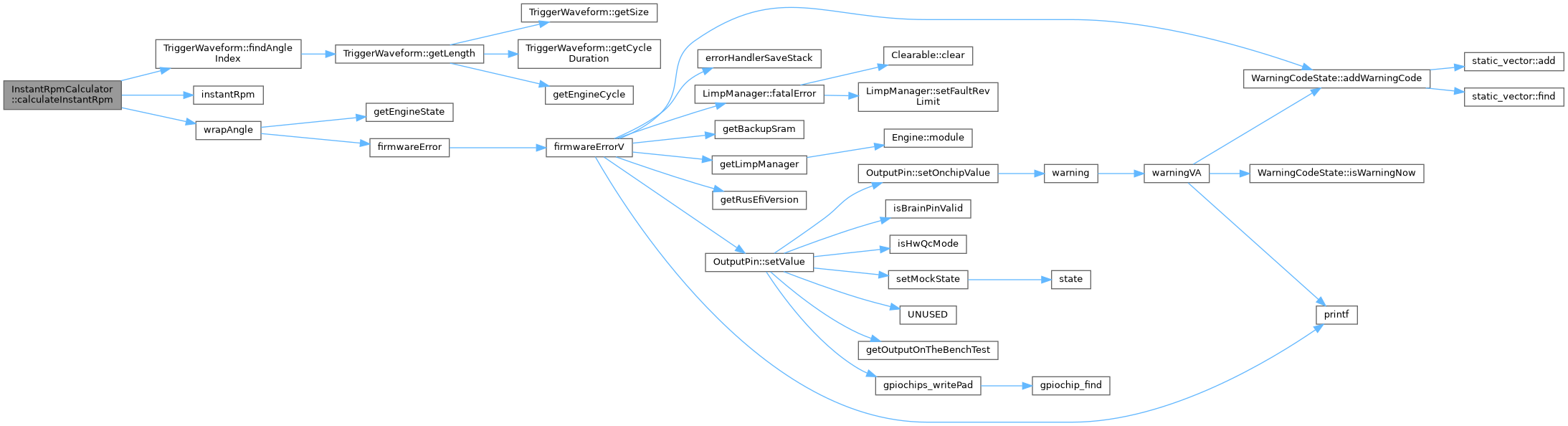
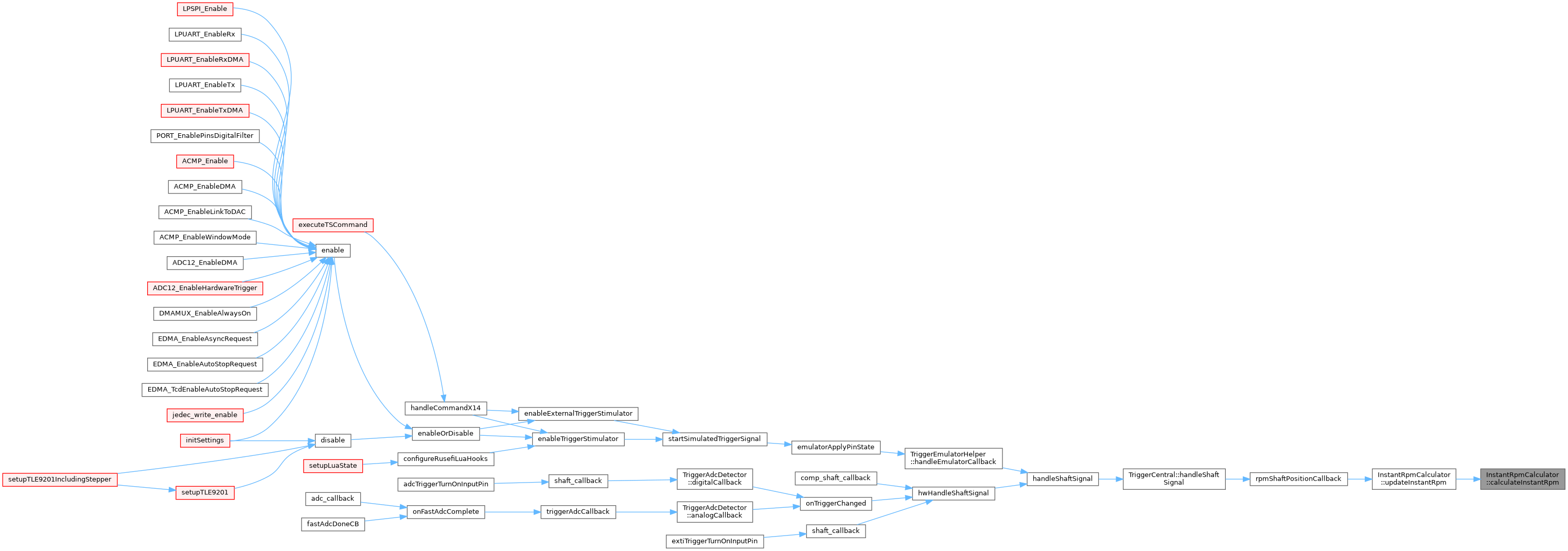
◆ calculateInstantRpm()
|
private |
Definition at line 46 of file instant_rpm_calculator.cpp.
Referenced by updateInstantRpm().
◆ getInstantRpm()
|
inline |
Definition at line 11 of file instant_rpm_calculator.h.
Referenced by getAdvanceCorrections(), IdleController::onFastCallback(), rpmShaftPositionCallback(), and updateTunerStudioState().

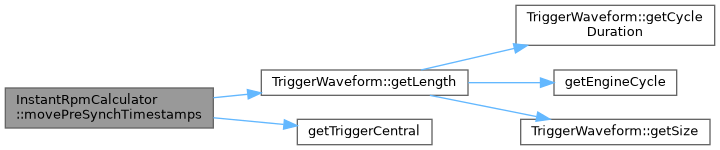
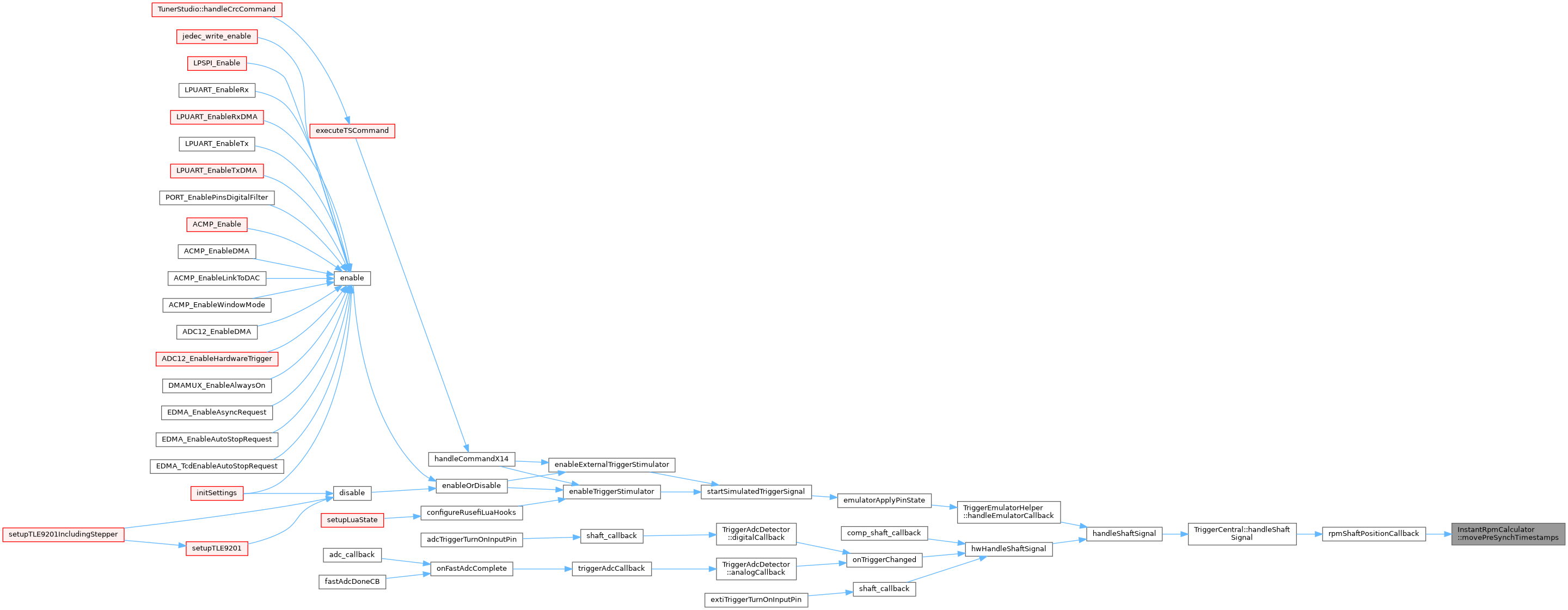
◆ movePreSynchTimestamps()
| void InstantRpmCalculator::movePreSynchTimestamps | ( | ) |
Definition at line 23 of file instant_rpm_calculator.cpp.
Referenced by rpmShaftPositionCallback().
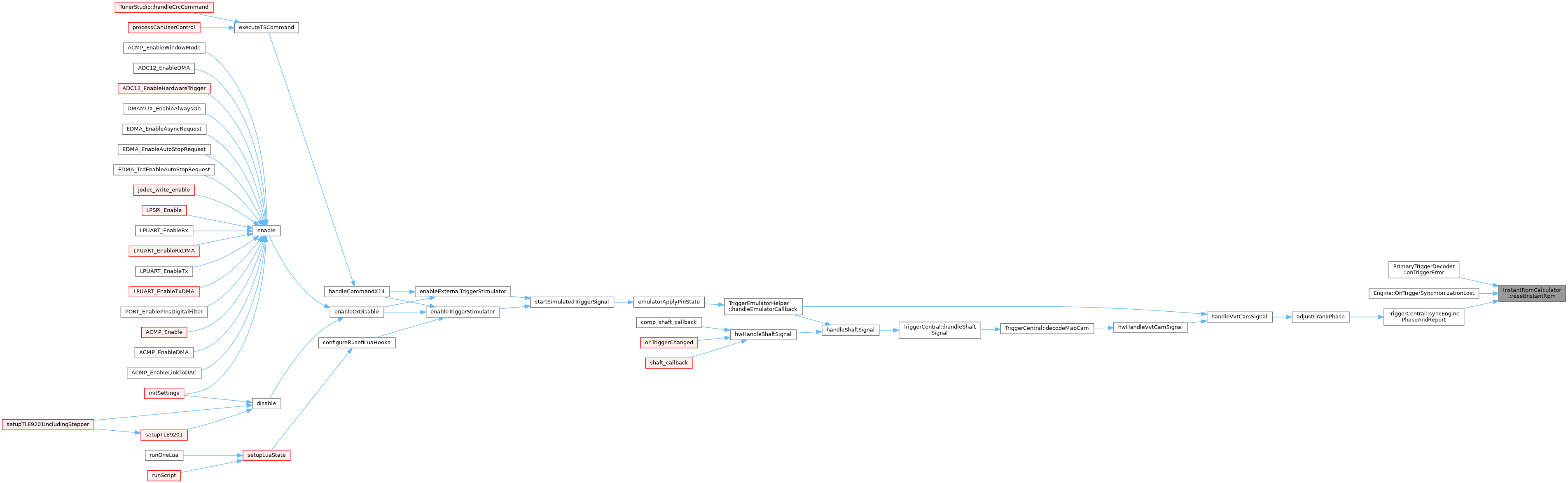
◆ resetInstantRpm()
|
inline |
Definition at line 29 of file instant_rpm_calculator.h.
Referenced by PrimaryTriggerDecoder::onTriggerError(), Engine::OnTriggerSynchronizationLost(), and TriggerCentral::syncEnginePhaseAndReport().

◆ setLastEventTimeForInstantRpm()
| void InstantRpmCalculator::setLastEventTimeForInstantRpm | ( | efitick_t | nowNt | ) |
Update timeOfLastEvent[] on every trigger event - even without synchronization Needed for early spin-up RPM detection.
Definition at line 105 of file instant_rpm_calculator.cpp.
Referenced by RpmCalculator::setSpinningUp().


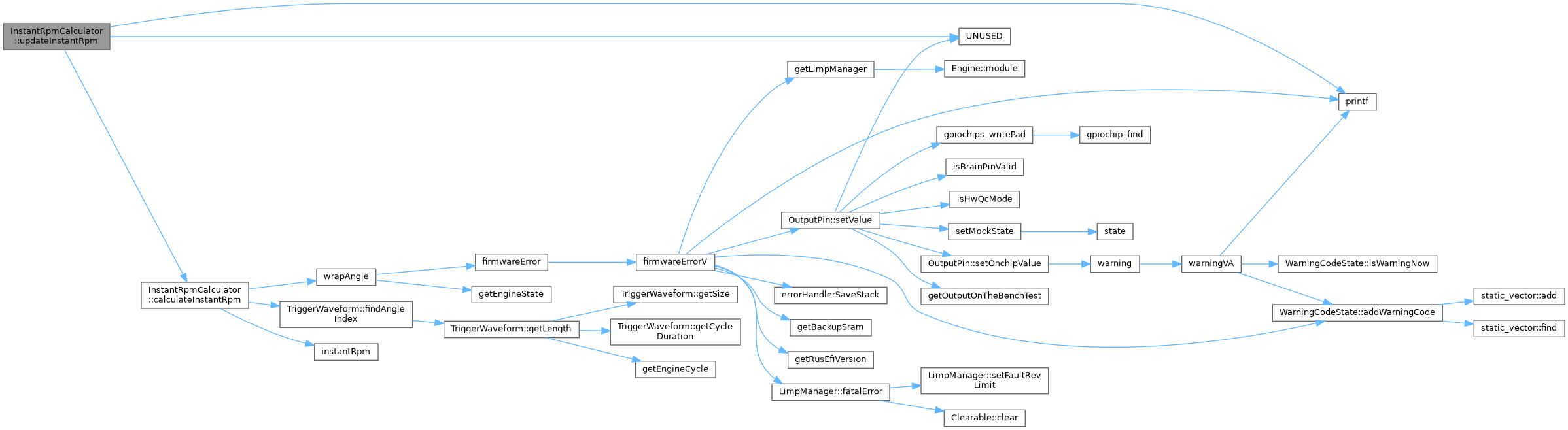
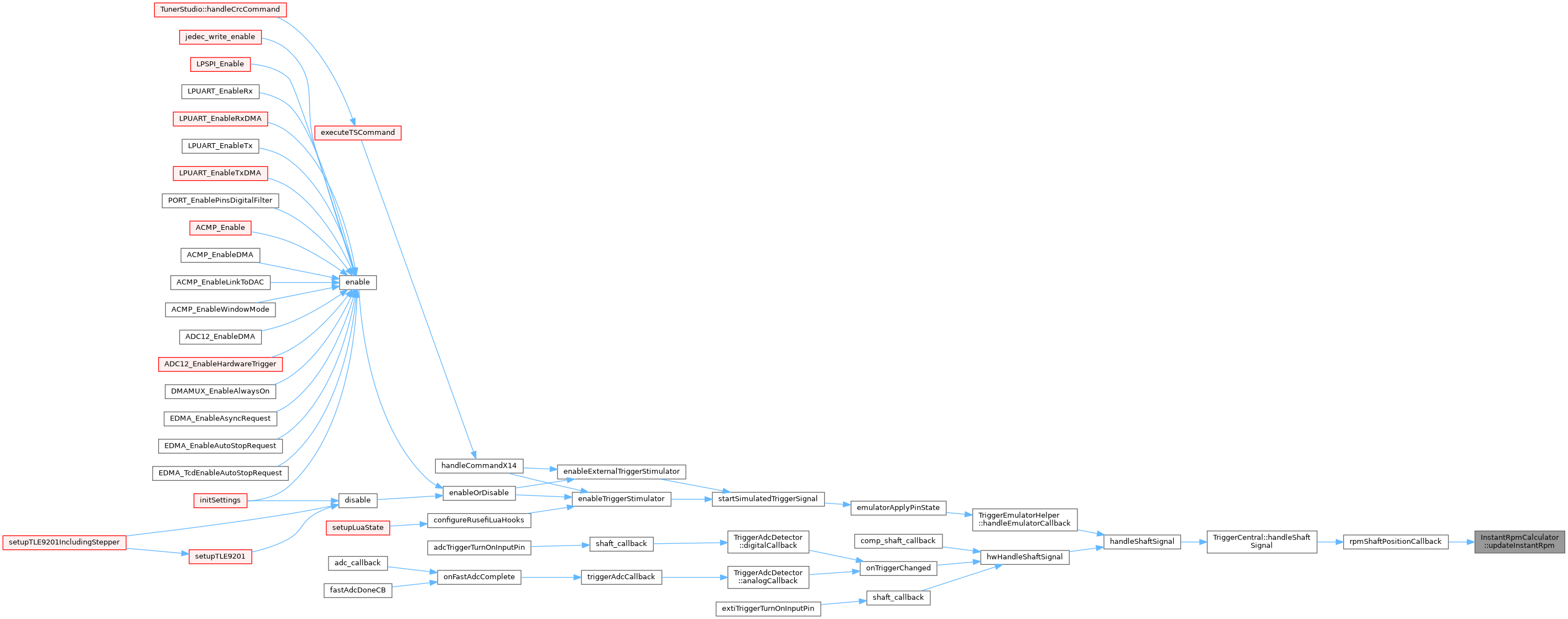
◆ updateInstantRpm()
| void InstantRpmCalculator::updateInstantRpm | ( | uint32_t | current_index, |
| TriggerWaveform const & | triggerShape, | ||
| TriggerFormDetails * | triggerFormDetails, | ||
| uint32_t | index, | ||
| efitick_t | nowNt | ||
| ) |
Definition at line 123 of file instant_rpm_calculator.cpp.
Referenced by rpmShaftPositionCallback().
Field Documentation
◆ instantRpmValue
| float InstantRpmCalculator::instantRpmValue[PWM_PHASE_MAX_COUNT] |
instant RPM calculated at this trigger wheel tooth
Definition at line 50 of file instant_rpm_calculator.h.
Referenced by calculateInstantRpm().
◆ m_instantRpm
| float InstantRpmCalculator::m_instantRpm = 0 |
Definition at line 57 of file instant_rpm_calculator.h.
Referenced by getInstantRpm(), resetInstantRpm(), and updateInstantRpm().
◆ m_instantRpmRatio
|
private |
Definition at line 63 of file instant_rpm_calculator.h.
Referenced by calculateInstantRpm().
◆ prevInstantRpmValue
| float InstantRpmCalculator::prevInstantRpmValue = 0 |
Stores last non-zero instant RPM value to fix early instability
Definition at line 54 of file instant_rpm_calculator.h.
Referenced by calculateInstantRpm(), and resetInstantRpm().
◆ spinningEventIndex
| size_t InstantRpmCalculator::spinningEventIndex = 0 |
Definition at line 42 of file instant_rpm_calculator.h.
Referenced by movePreSynchTimestamps(), resetInstantRpm(), setLastEventTimeForInstantRpm(), and RpmCalculator::setSpinningUp().
◆ spinningEvents
| uint32_t InstantRpmCalculator::spinningEvents[120] |
Definition at line 46 of file instant_rpm_calculator.h.
Referenced by movePreSynchTimestamps(), resetInstantRpm(), and setLastEventTimeForInstantRpm().
◆ timeOfLastEvent
| uint32_t InstantRpmCalculator::timeOfLastEvent[PWM_PHASE_MAX_COUNT] |
timestamp of each trigger wheel tooth
Definition at line 40 of file instant_rpm_calculator.h.
Referenced by calculateInstantRpm(), movePreSynchTimestamps(), and resetInstantRpm().
The documentation for this class was generated from the following files:
- controllers/trigger/instant_rpm_calculator.h
- controllers/trigger/instant_rpm_calculator.cpp