Functions | |
| static void | setupDefaultSensorInputs () |
| void | setBoardConfigOverrides () |
| void | setBoardDefaultConfiguration () |
| Hardware board-specific default configuration (GPIO pins, ADC channels, SPI configs etc.) More... | |
| int | getBoardMetaDcOutputsCount () |
| int | getBoardMetaOutputsCount () |
| int | getBoardMetaLowSideOutputsCount () |
| Gpio * | getBoardMetaOutputs () |
Variables | |
| static Gpio | OUTPUTS [] |
| static Gpio | SBC_OUTPUTS [] |
Function Documentation
◆ getBoardMetaDcOutputsCount()
| int getBoardMetaDcOutputsCount | ( | ) |
Definition at line 77 of file board_configuration.cpp.
◆ getBoardMetaLowSideOutputsCount()
| int getBoardMetaLowSideOutputsCount | ( | ) |
Definition at line 125 of file board_configuration.cpp.

◆ getBoardMetaOutputs()
| Gpio* getBoardMetaOutputs | ( | ) |
Definition at line 132 of file board_configuration.cpp.
◆ getBoardMetaOutputsCount()
| int getBoardMetaOutputsCount | ( | ) |
Definition at line 118 of file board_configuration.cpp.
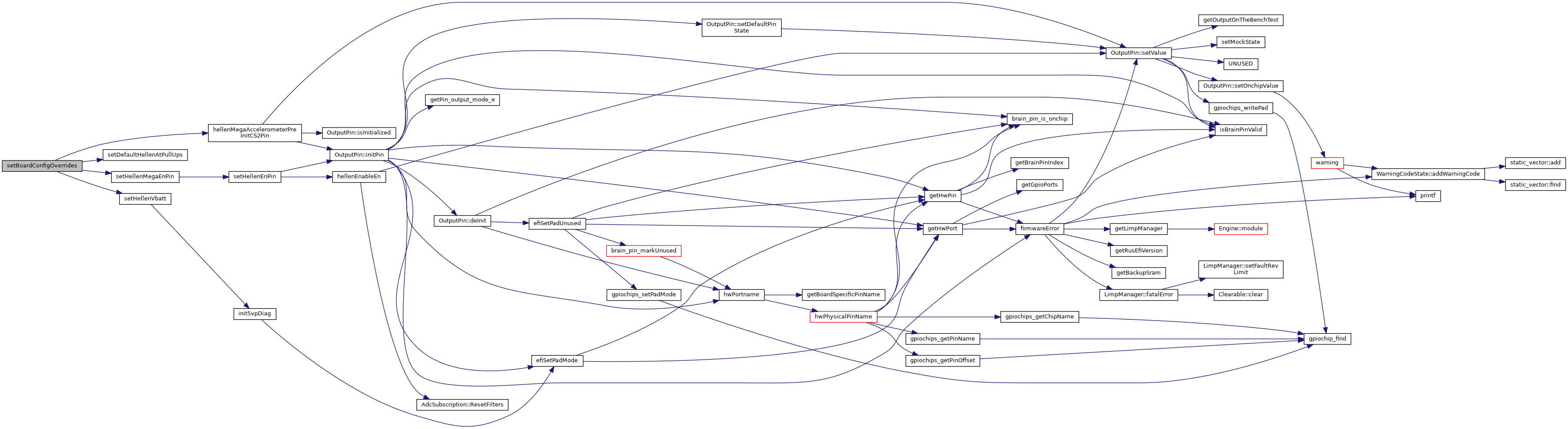
◆ setBoardConfigOverrides()
| void setBoardConfigOverrides | ( | ) |
Definition at line 29 of file board_configuration.cpp.
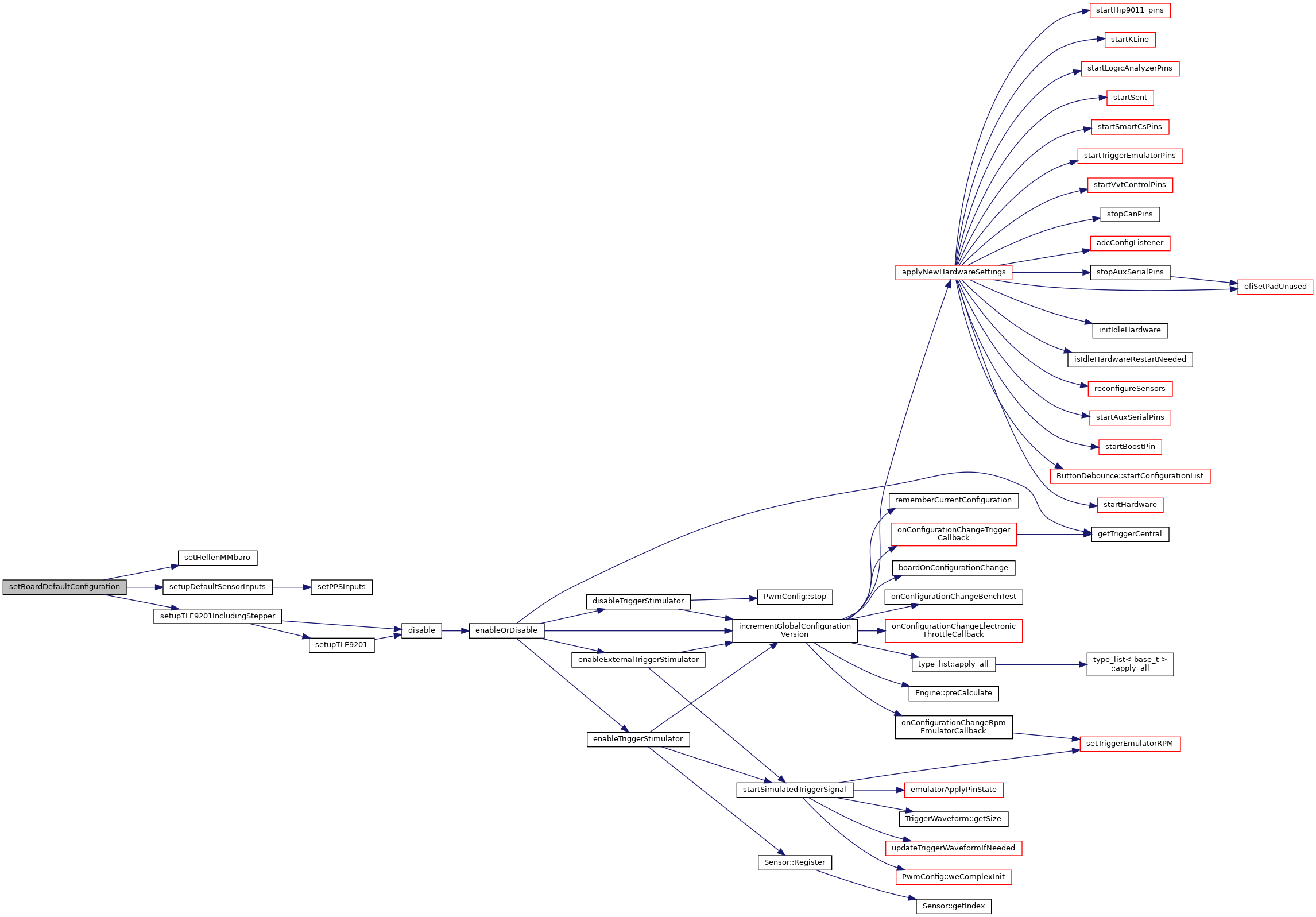
◆ setBoardDefaultConfiguration()
| void setBoardDefaultConfiguration | ( | ) |
Hardware board-specific default configuration (GPIO pins, ADC channels, SPI configs etc.)
Hardware board-specific default configuration (GPIO pins, ADC channels, SPI configs etc.)
Hardware board-specific default configuration (GPIO pins, ADC channels, SPI configs etc.)
See also setDefaultEngineConfiguration
!!!!!!!!!!!!!!!!!!
Jimmy best tune https://rusefi.com/online/view.php?msq=626 md_sanci latest tune https://rusefi.com/online/view.php?msq=630
Definition at line 49 of file board_configuration.cpp.
◆ setupDefaultSensorInputs()
|
static |
See https://rusefi.com/s/uaefi121
Definition at line 12 of file board_configuration.cpp.
Referenced by setBoardDefaultConfiguration().


Variable Documentation
◆ OUTPUTS
|
static |
Definition at line 81 of file board_configuration.cpp.
Referenced by getBoardMetaOutputs(), and getBoardMetaOutputsCount().
◆ SBC_OUTPUTS
|
static |
Definition at line 105 of file board_configuration.cpp.
Referenced by getBoardMetaOutputs(), and getBoardMetaOutputsCount().