Detailed Description
Configuration defaults for the 2chan board.
Definition in file board_configuration.cpp.
Functions | |
| static void | setInjectorPins () |
| static void | setIgnitionPins () |
| static void | setupDefaultSensorInputs () |
| static void | alphax_2chan_boardInitHardware () |
| void | boardOnConfigurationChange (engine_configuration_s *) |
| static bool | isMegaModuleRevision () |
| static void | alphax_2chan_ConfigOverrides () |
| static void | alphax_2chan_defaultConfiguration () |
| Board-specific configuration defaults. | |
| void | boardPrepareForStop () |
| int | getBoardMetaOutputsCount () |
| Gpio * | getBoardMetaOutputs () |
| void | setup_custom_board_overrides () |
Variables | |
| static OutputPin | alphaTachPullUp |
| static OutputPin | alphaTempPullUp |
| static OutputPin | alphaCrankPPullUp |
| static OutputPin | alphaCrankNPullUp |
| static OutputPin | alpha2stepPullDown |
| static OutputPin | alphaCamPullDown |
| static Gpio | OUTPUTS [] |
Function Documentation
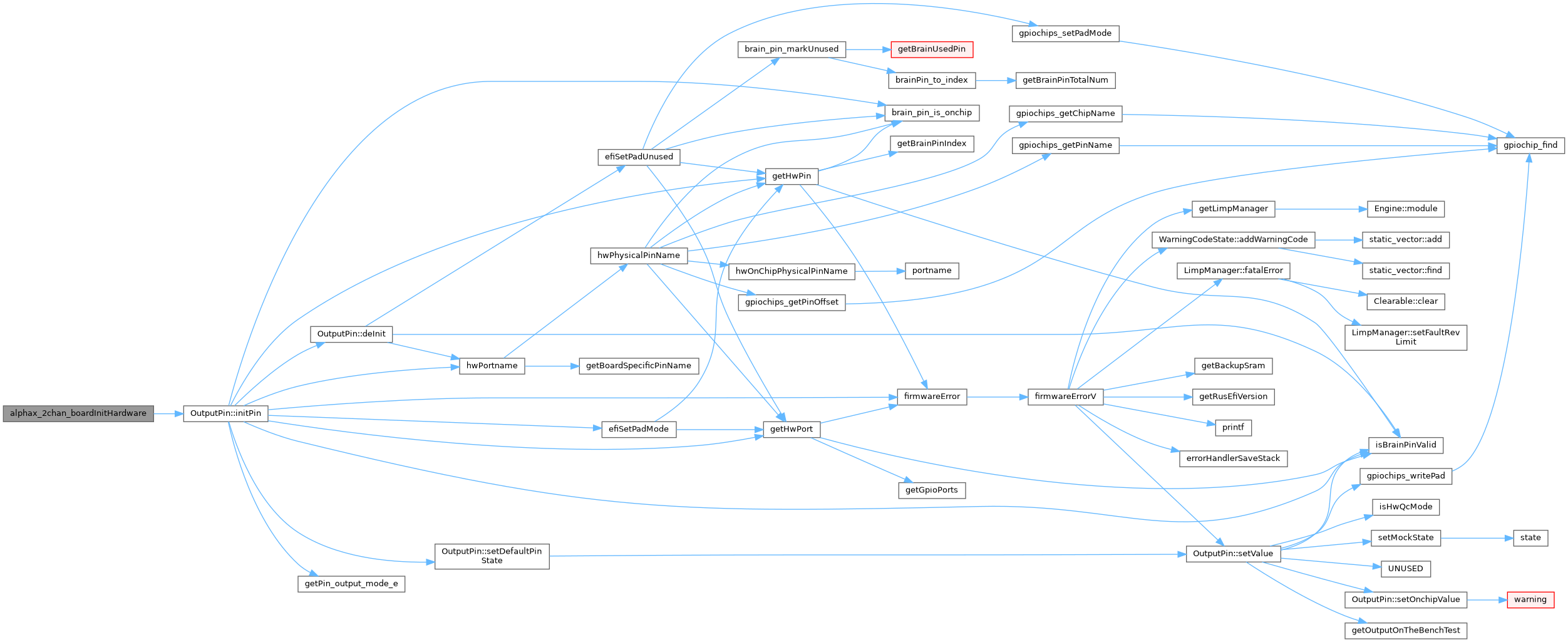
◆ alphax_2chan_boardInitHardware()
|
static |
Definition at line 58 of file board_configuration.cpp.
Referenced by setup_custom_board_overrides().

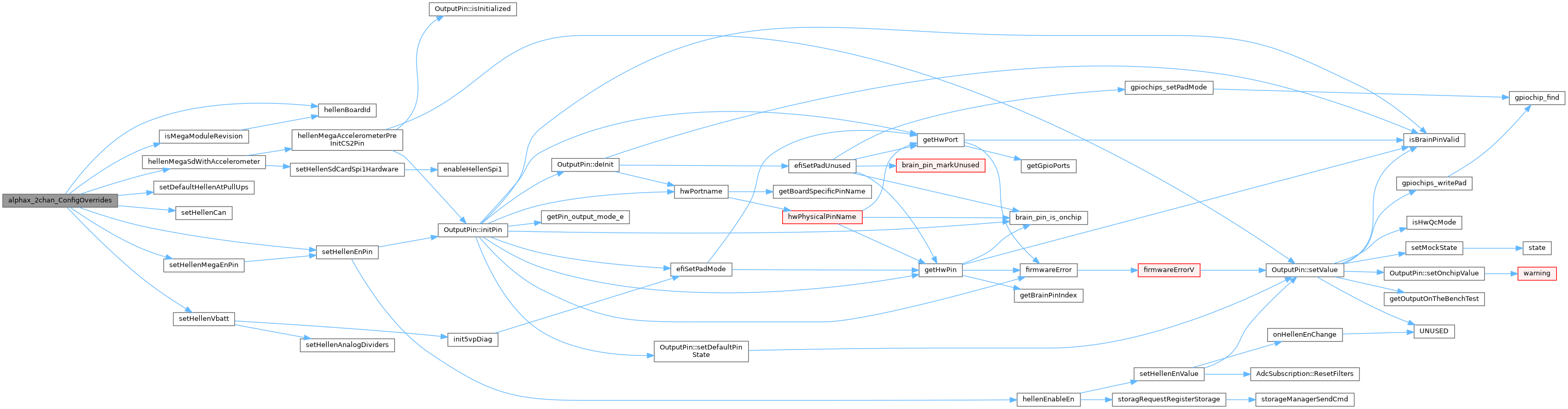
◆ alphax_2chan_ConfigOverrides()
|
static |
Definition at line 88 of file board_configuration.cpp.
Referenced by setup_custom_board_overrides().

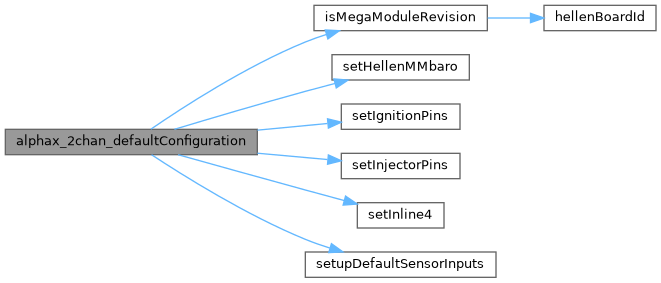
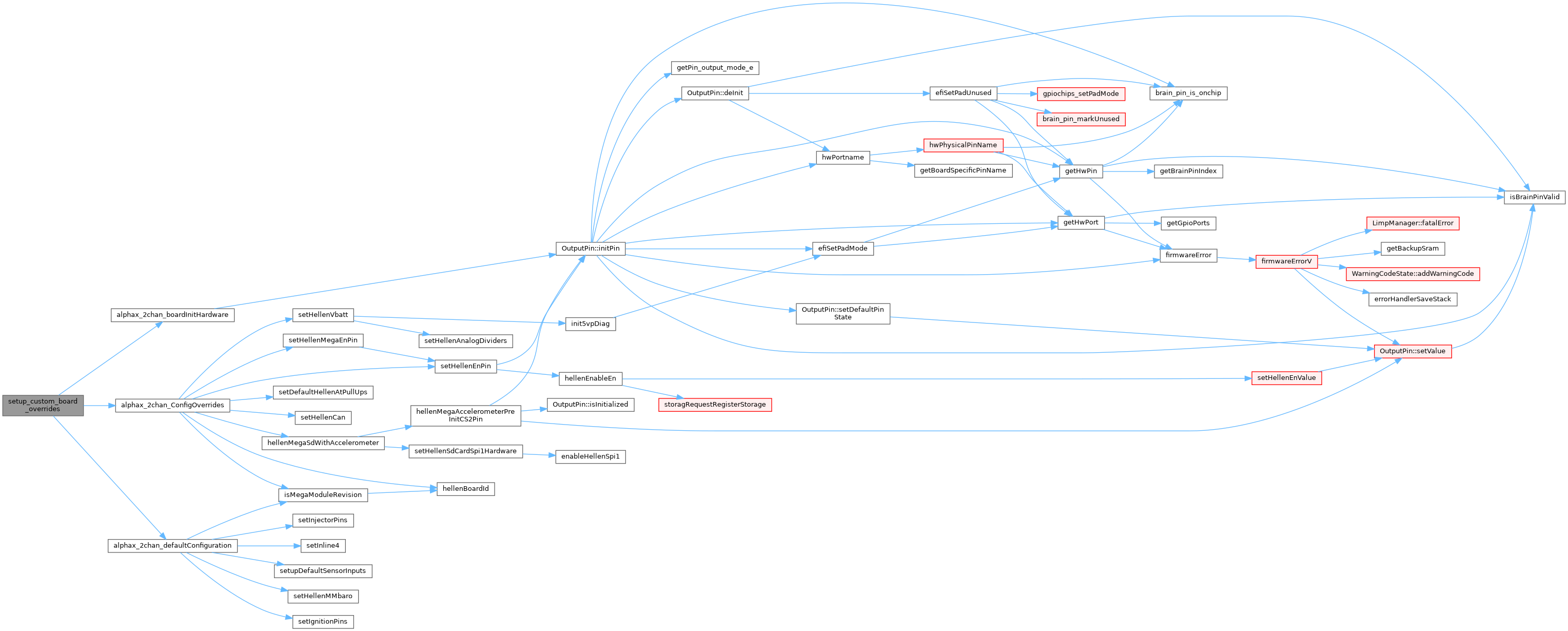
◆ alphax_2chan_defaultConfiguration()
|
static |
Board-specific configuration defaults.
See also setDefaultEngineConfiguration
Definition at line 127 of file board_configuration.cpp.
Referenced by setup_custom_board_overrides().

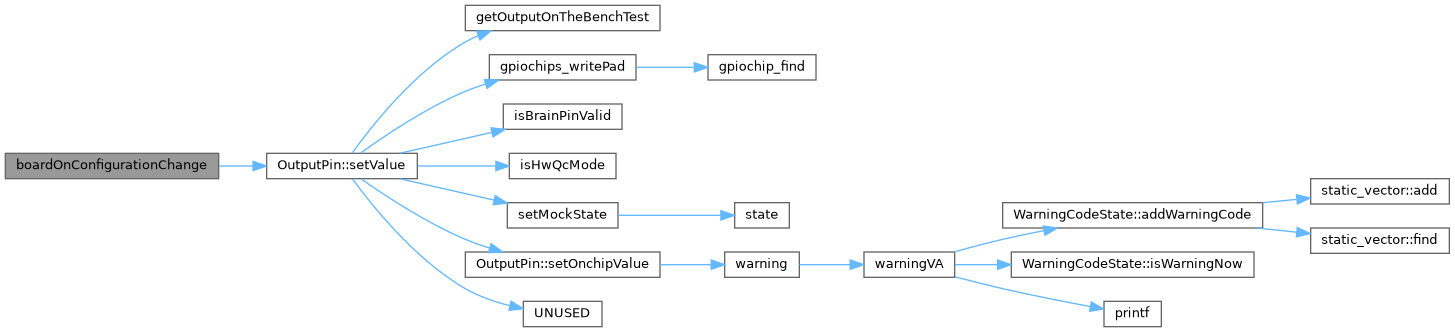
◆ boardOnConfigurationChange()
| void boardOnConfigurationChange | ( | engine_configuration_s * | previousConfiguration | ) |
Definition at line 68 of file board_configuration.cpp.
Referenced by initHardware().

◆ boardPrepareForStop()
| void boardPrepareForStop | ( | ) |
Definition at line 158 of file board_configuration.cpp.
◆ getBoardMetaOutputs()
| Gpio * getBoardMetaOutputs | ( | ) |
Definition at line 172 of file board_configuration.cpp.
Referenced by initQcBenchControls(), and setPin().

◆ getBoardMetaOutputsCount()
| int getBoardMetaOutputsCount | ( | ) |
Definition at line 168 of file board_configuration.cpp.
Referenced by getBoardMetaLowSideOutputsCount(), sendOutBoardMeta(), and setPin().

◆ isMegaModuleRevision()
|
static |
Definition at line 79 of file board_configuration.cpp.
Referenced by alphax_2chan_ConfigOverrides(), and alphax_2chan_defaultConfiguration().


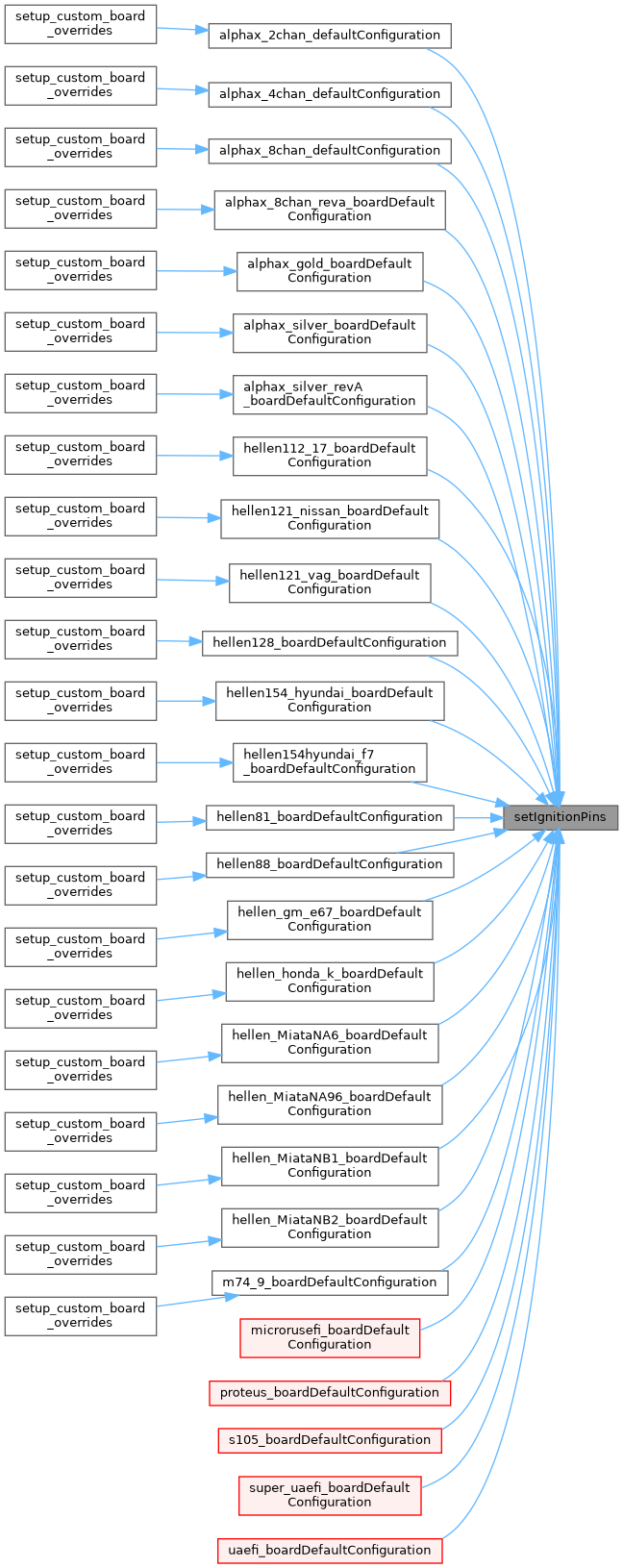
◆ setIgnitionPins()
|
static |
Definition at line 35 of file board_configuration.cpp.
Referenced by alphax_2chan_defaultConfiguration(), alphax_4chan_defaultConfiguration(), alphax_8chan_defaultConfiguration(), alphax_8chan_reva_boardDefaultConfiguration(), alphax_gold_boardDefaultConfiguration(), alphax_silver_boardDefaultConfiguration(), alphax_silver_revA_boardDefaultConfiguration(), hellen112_17_boardDefaultConfiguration(), hellen121_nissan_boardDefaultConfiguration(), hellen121_vag_boardDefaultConfiguration(), hellen128_boardDefaultConfiguration(), hellen154_hyundai_boardDefaultConfiguration(), hellen154hyundai_f7_boardDefaultConfiguration(), hellen81_boardDefaultConfiguration(), hellen88_boardDefaultConfiguration(), hellen_gm_e67_boardDefaultConfiguration(), hellen_honda_k_boardDefaultConfiguration(), hellen_MiataNA6_boardDefaultConfiguration(), hellen_MiataNA96_boardDefaultConfiguration(), hellen_MiataNB1_boardDefaultConfiguration(), hellen_MiataNB2_boardDefaultConfiguration(), m74_9_boardDefaultConfiguration(), microrusefi_boardDefaultConfiguration(), proteus_boardDefaultConfiguration(), s105_boardDefaultConfiguration(), super_uaefi_boardDefaultConfiguration(), and uaefi_boardDefaultConfiguration().
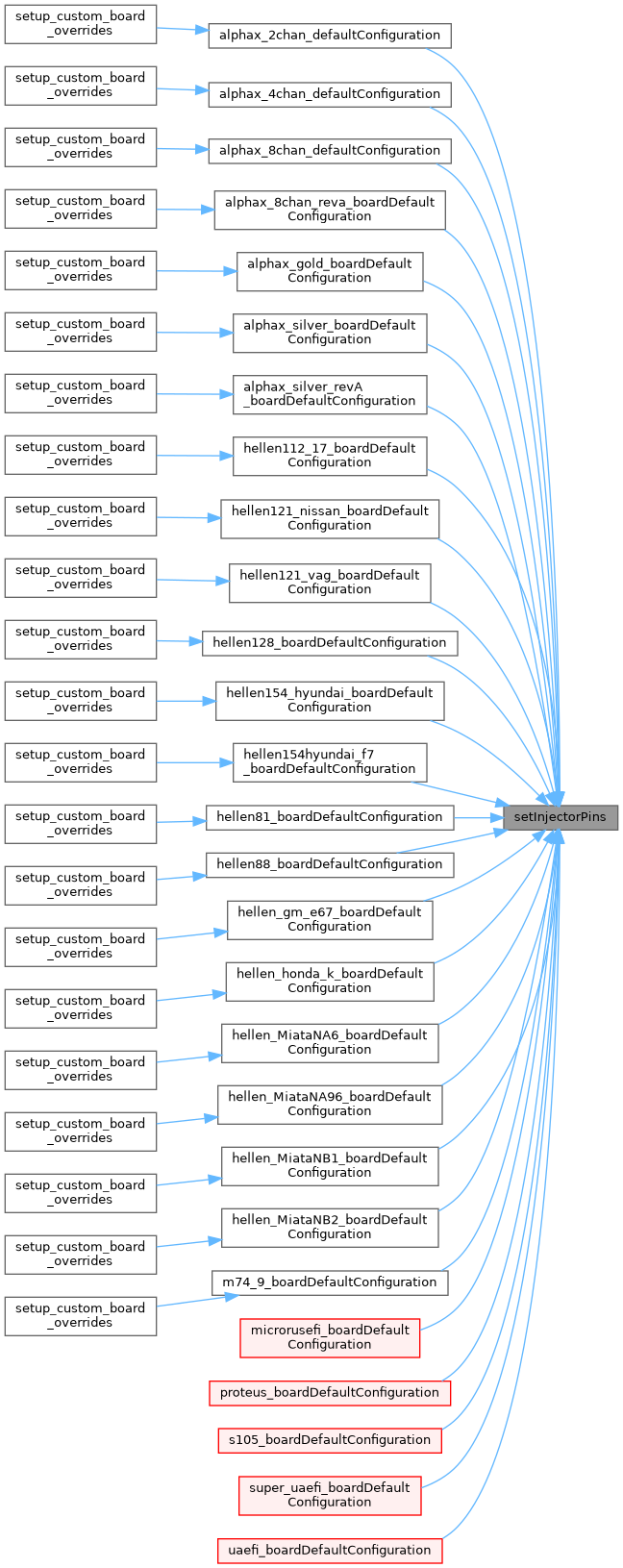
◆ setInjectorPins()
|
static |
Definition at line 23 of file board_configuration.cpp.
Referenced by alphax_2chan_defaultConfiguration(), alphax_4chan_defaultConfiguration(), alphax_8chan_defaultConfiguration(), alphax_8chan_reva_boardDefaultConfiguration(), alphax_gold_boardDefaultConfiguration(), alphax_silver_boardDefaultConfiguration(), alphax_silver_revA_boardDefaultConfiguration(), hellen112_17_boardDefaultConfiguration(), hellen121_nissan_boardDefaultConfiguration(), hellen121_vag_boardDefaultConfiguration(), hellen128_boardDefaultConfiguration(), hellen154_hyundai_boardDefaultConfiguration(), hellen154hyundai_f7_boardDefaultConfiguration(), hellen81_boardDefaultConfiguration(), hellen88_boardDefaultConfiguration(), hellen_gm_e67_boardDefaultConfiguration(), hellen_honda_k_boardDefaultConfiguration(), hellen_MiataNA6_boardDefaultConfiguration(), hellen_MiataNA96_boardDefaultConfiguration(), hellen_MiataNB1_boardDefaultConfiguration(), hellen_MiataNB2_boardDefaultConfiguration(), m74_9_boardDefaultConfiguration(), microrusefi_boardDefaultConfiguration(), proteus_boardDefaultConfiguration(), s105_boardDefaultConfiguration(), super_uaefi_boardDefaultConfiguration(), and uaefi_boardDefaultConfiguration().
◆ setup_custom_board_overrides()
| void setup_custom_board_overrides | ( | ) |
Definition at line 176 of file board_configuration.cpp.
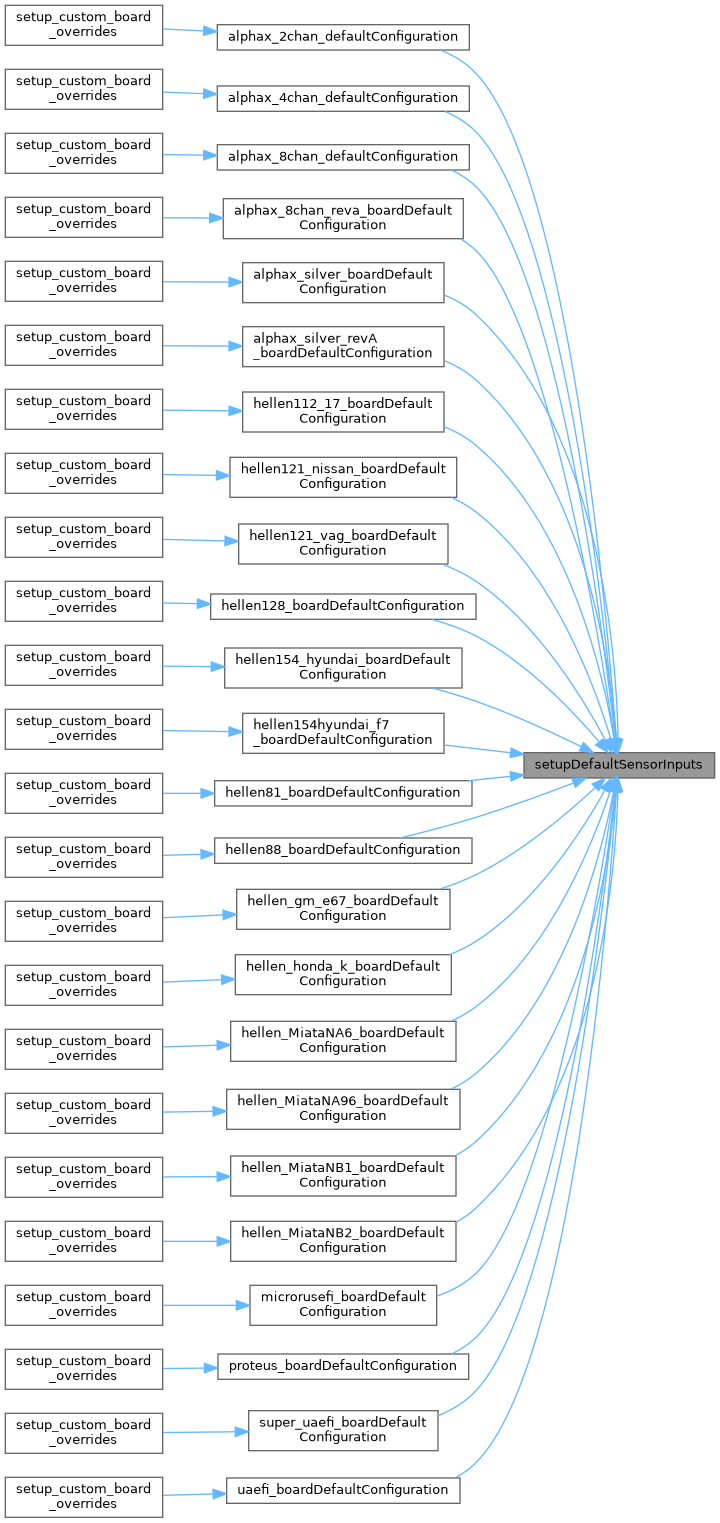
◆ setupDefaultSensorInputs()
|
static |
Definition at line 42 of file board_configuration.cpp.
Referenced by alphax_2chan_defaultConfiguration(), alphax_4chan_defaultConfiguration(), alphax_8chan_defaultConfiguration(), alphax_8chan_reva_boardDefaultConfiguration(), alphax_silver_boardDefaultConfiguration(), alphax_silver_revA_boardDefaultConfiguration(), hellen112_17_boardDefaultConfiguration(), hellen121_nissan_boardDefaultConfiguration(), hellen121_vag_boardDefaultConfiguration(), hellen128_boardDefaultConfiguration(), hellen154_hyundai_boardDefaultConfiguration(), hellen154hyundai_f7_boardDefaultConfiguration(), hellen81_boardDefaultConfiguration(), hellen88_boardDefaultConfiguration(), hellen_gm_e67_boardDefaultConfiguration(), hellen_honda_k_boardDefaultConfiguration(), hellen_MiataNA6_boardDefaultConfiguration(), hellen_MiataNA96_boardDefaultConfiguration(), hellen_MiataNB1_boardDefaultConfiguration(), hellen_MiataNB2_boardDefaultConfiguration(), microrusefi_boardDefaultConfiguration(), proteus_boardDefaultConfiguration(), super_uaefi_boardDefaultConfiguration(), and uaefi_boardDefaultConfiguration().
Variable Documentation
◆ alpha2stepPullDown
|
static |
Definition at line 20 of file board_configuration.cpp.
Referenced by alphax_2chan_boardInitHardware(), alphax_4chan_boardInitHardware(), alphax_8chan_reva_boardInitHardware(), and boardOnConfigurationChange().
◆ alphaCamPullDown
|
static |
Definition at line 21 of file board_configuration.cpp.
Referenced by alphax_2chan_boardInitHardware(), alphax_4chan_boardInitHardware(), alphax_8chan_reva_boardInitHardware(), and boardOnConfigurationChange().
◆ alphaCrankNPullUp
|
static |
Definition at line 19 of file board_configuration.cpp.
Referenced by alphax_2chan_boardInitHardware(), alphax_4chan_boardInitHardware(), and boardOnConfigurationChange().
◆ alphaCrankPPullUp
|
static |
Definition at line 18 of file board_configuration.cpp.
Referenced by alphax_2chan_boardInitHardware(), alphax_4chan_boardInitHardware(), alphax_8chan_boardInitHardware(), alphax_8chan_reva_boardInitHardware(), and boardOnConfigurationChange().
◆ alphaTachPullUp
|
static |
Definition at line 16 of file board_configuration.cpp.
Referenced by alphax_2chan_boardInitHardware(), alphax_4chan_boardInitHardware(), alphax_8chan_reva_boardInitHardware(), and boardOnConfigurationChange().
◆ alphaTempPullUp
|
static |
Definition at line 17 of file board_configuration.cpp.
Referenced by alphax_2chan_boardInitHardware(), alphax_4chan_boardInitHardware(), alphax_8chan_reva_boardInitHardware(), alphax_gold_boardInitHardware(), alphax_silver_boardInitHardware(), alphax_silver_revA_boardInitHardware(), and boardOnConfigurationChange().
◆ OUTPUTS
|
static |
Definition at line 163 of file board_configuration.cpp.
Referenced by getBoardMetaOutputs(), and getBoardMetaOutputsCount().