Functions | |
| static void | setDefaultAlternatorParameters () |
| void | setHpfpLobeProfileAngle (int lobes) |
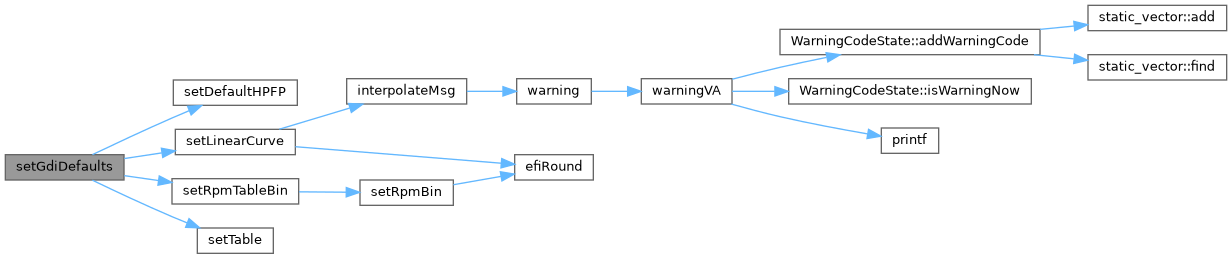
| static void | setDefaultHPFP () |
| static void | setGdiDefaults () |
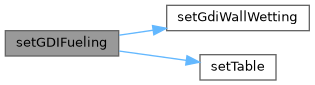
| void | setGDIFueling () |
| void | setLeftRightBanksNeedBetterName () |
| static void | mc33810defaults () |
| void | setDynoDefaults () |
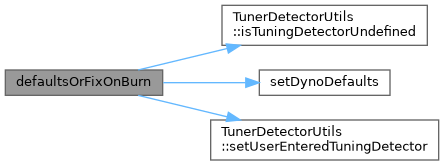
| void | defaultsOrFixOnBurn () |
| void | setDefaultBaseEngine () |
| void | setPPSInputs (adc_channel_e pps1, adc_channel_e pps2) |
| void | setTPS1Inputs (adc_channel_e tps1, adc_channel_e tps2) |
| void | setTPS1Calibration (uint16_t tpsMin, uint16_t tpsMax) |
| void | setTPS1Calibration (uint16_t tpsMin, uint16_t tpsMax, uint16_t tps1SecondaryMin, uint16_t tps1SecondaryMax) |
| void | setCustomMap (float lowValue, float mapLowValueVoltage, float highValue, float mapHighValueVoltage) |
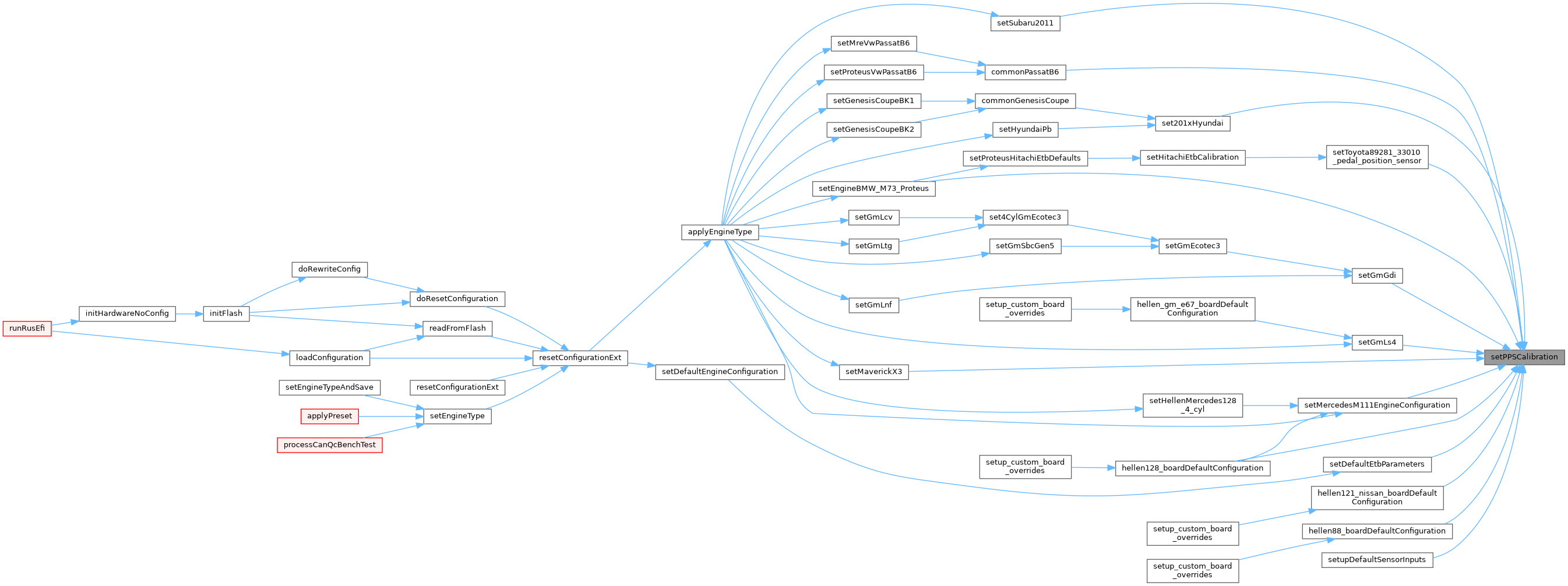
| void | setPPSCalibration (float primaryUp, float primaryDown, float secondaryUp, float secondaryDown) |
| void | setEtbPID (float p, float i, float d) |
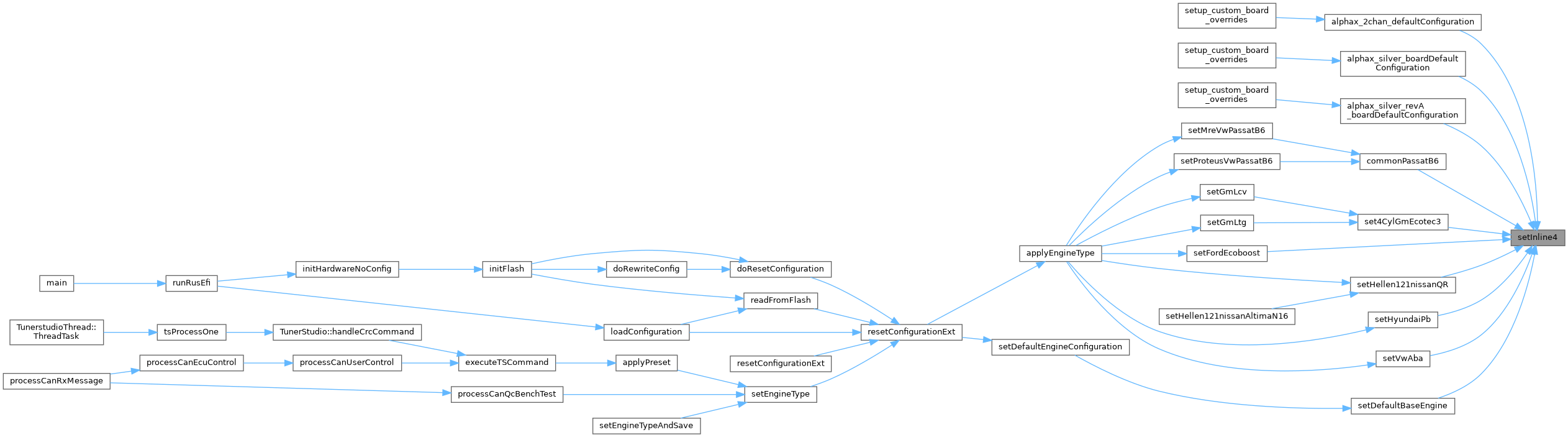
| void | setInline4 () |
| void | setProteusEtbIO () |
| void | setupTLE9201 (Gpio controlPin, Gpio direction, Gpio disable, int dcIndex) |
| void | setupTLE9201IncludingStepper (Gpio controlPin, Gpio direction, Gpio disable, int dcIndex) |
Function Documentation
◆ defaultsOrFixOnBurn()
| void defaultsOrFixOnBurn | ( | ) |
Definition at line 130 of file default_base_engine.cpp.
Referenced by setDefaultBaseEngine(), and validateConfigOnStartUpOrBurn().

◆ mc33810defaults()
|
static |
Definition at line 103 of file default_base_engine.cpp.
Referenced by setDefaultBaseEngine().

◆ setCustomMap()
| void setCustomMap | ( | float | lowValue, |
| float | mapLowValueVoltage, | ||
| float | highValue, | ||
| float | mapHighValueVoltage | ||
| ) |
Definition at line 455 of file default_base_engine.cpp.
Referenced by hellen112_17_boardDefaultConfiguration(), setHarley(), setHyundaiPb(), setMercedesM111EngineConfiguration(), and setSlingshot().

◆ setDefaultAlternatorParameters()
|
static |
Definition at line 14 of file default_base_engine.cpp.
Referenced by setDefaultBaseEngine().


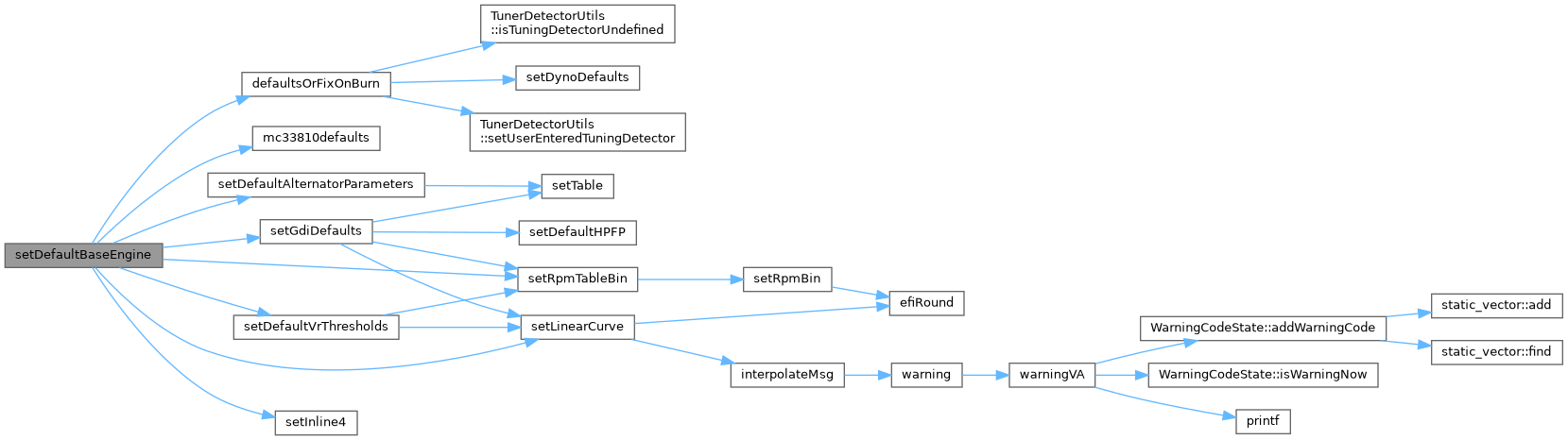
◆ setDefaultBaseEngine()
| void setDefaultBaseEngine | ( | ) |
Definition at line 165 of file default_base_engine.cpp.
Referenced by setDefaultEngineConfiguration().

◆ setDefaultHPFP()
|
static |
Definition at line 38 of file default_base_engine.cpp.
Referenced by setGdiDefaults().

◆ setDynoDefaults()
| void setDynoDefaults | ( | ) |
Definition at line 109 of file default_base_engine.cpp.
Referenced by defaultsOrFixOnBurn().

◆ setEtbPID()
Definition at line 470 of file default_base_engine.cpp.
Referenced by hellen121_nissan_boardDefaultConfiguration(), hellen_gm_e67_boardDefaultConfiguration(), and set201xHyundai().

◆ setGdiDefaults()
|
static |
Definition at line 56 of file default_base_engine.cpp.
Referenced by setDefaultBaseEngine().

◆ setGDIFueling()
| void setGDIFueling | ( | ) |
Definition at line 71 of file default_base_engine.cpp.
Referenced by alphax_4kgdi_defaultConfiguration(), commonPassatB6(), setGmGdi(), and setHyundaiPb().

◆ setHpfpLobeProfileAngle()
| void setHpfpLobeProfileAngle | ( | int | lobes | ) |
Definition at line 23 of file default_base_engine.cpp.
Referenced by set4CylGmEcotec3(), setBoschHDEV_5_injectors(), setFordEcoboost(), and setHyundaiPb().

◆ setInline4()
| void setInline4 | ( | ) |
Definition at line 476 of file default_base_engine.cpp.
Referenced by alphax_2chan_defaultConfiguration(), alphax_silver_boardDefaultConfiguration(), alphax_silver_revA_boardDefaultConfiguration(), commonPassatB6(), set4CylGmEcotec3(), setDefaultBaseEngine(), setFordEcoboost(), setHellen121nissanQR(), setHyundaiPb(), and setVwAba().
◆ setLeftRightBanksNeedBetterName()
| void setLeftRightBanksNeedBetterName | ( | ) |
file defaults.h
Definition at line 96 of file default_base_engine.cpp.
Referenced by setGmLs4(), and setSubaruEG33Defaults().

◆ setPPSCalibration()
| void setPPSCalibration | ( | float | primaryUp, |
| float | primaryDown, | ||
| float | secondaryUp, | ||
| float | secondaryDown | ||
| ) |
Definition at line 463 of file default_base_engine.cpp.
Referenced by commonPassatB6(), hellen121_nissan_boardDefaultConfiguration(), hellen128_boardDefaultConfiguration(), hellen88_boardDefaultConfiguration(), set201xHyundai(), setDefaultEtbParameters(), setEngineBMW_M73_Proteus(), setGmGdi(), setGmLs4(), setMaverickX3(), setMercedesM111EngineConfiguration(), setSubaru2011(), setToyota89281_33010_pedal_position_sensor(), and setupDefaultSensorInputs().
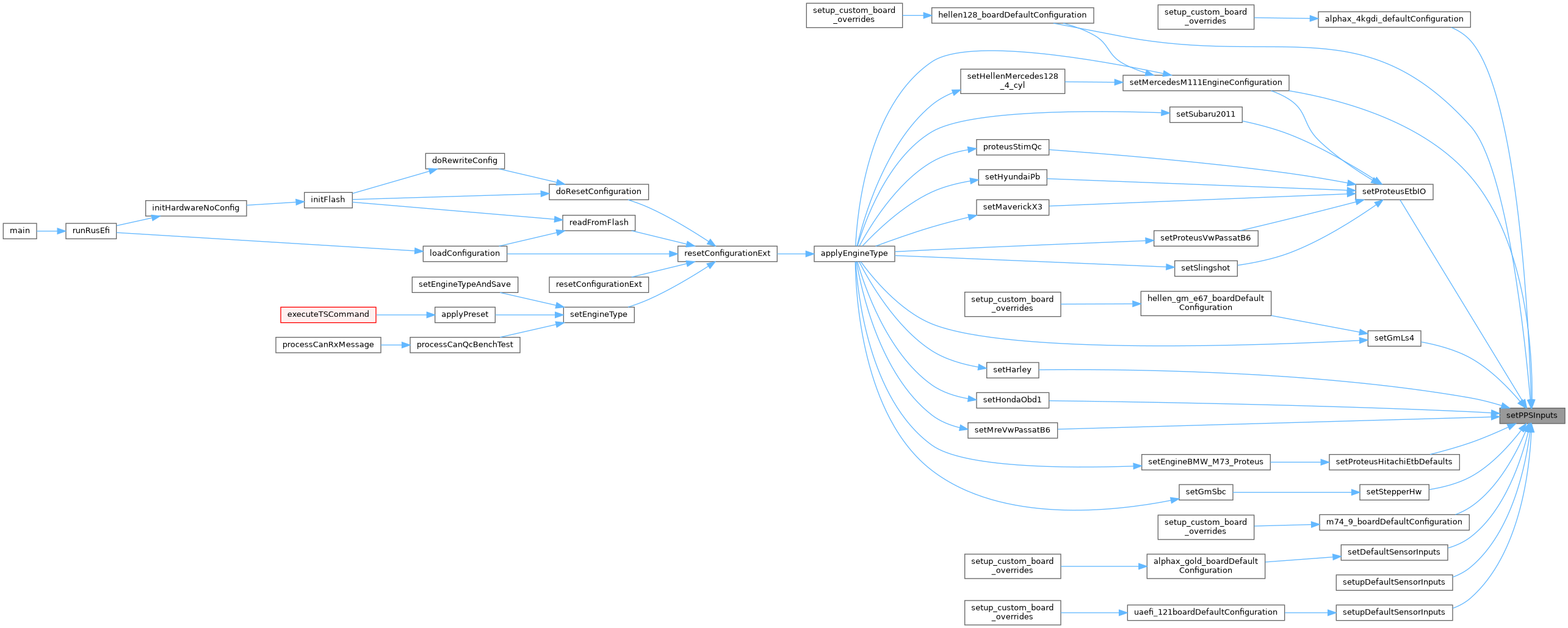
◆ setPPSInputs()
| void setPPSInputs | ( | adc_channel_e | pps1, |
| adc_channel_e | pps2 | ||
| ) |
Definition at line 432 of file default_base_engine.cpp.
Referenced by alphax_4kgdi_defaultConfiguration(), hellen128_boardDefaultConfiguration(), m74_9_boardDefaultConfiguration(), setDefaultSensorInputs(), setGmLs4(), setHarley(), setHondaObd1(), setMercedesM111EngineConfiguration(), setMreVwPassatB6(), setProteusEtbIO(), setProteusHitachiEtbDefaults(), setStepperHw(), setupDefaultSensorInputs(), and setupDefaultSensorInputs().
◆ setProteusEtbIO()
| void setProteusEtbIO | ( | ) |
Definition at line 481 of file default_base_engine.cpp.
Referenced by proteusStimQc(), setHyundaiPb(), setMaverickX3(), setMercedesM111EngineConfiguration(), setProteusVwPassatB6(), setSlingshot(), and setSubaru2011().


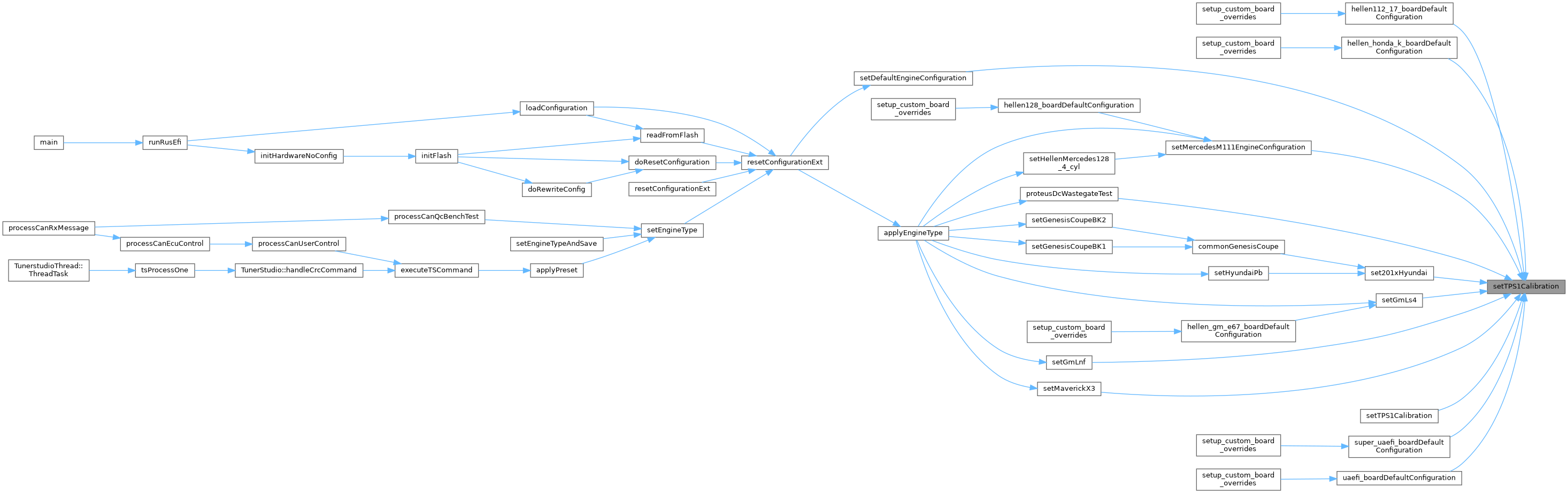
◆ setTPS1Calibration() [1/2]
| void setTPS1Calibration | ( | uint16_t | tpsMin, |
| uint16_t | tpsMax | ||
| ) |
Definition at line 442 of file default_base_engine.cpp.
Referenced by hellen112_17_boardDefaultConfiguration(), hellen_honda_k_boardDefaultConfiguration(), proteusDcWastegateTest(), set201xHyundai(), setDefaultEngineConfiguration(), setGmLnf(), setGmLs4(), setMaverickX3(), setMercedesM111EngineConfiguration(), setTPS1Calibration(), super_uaefi_boardDefaultConfiguration(), and uaefi_boardDefaultConfiguration().
◆ setTPS1Calibration() [2/2]
| void setTPS1Calibration | ( | uint16_t | tpsMin, |
| uint16_t | tpsMax, | ||
| uint16_t | tps1SecondaryMin, | ||
| uint16_t | tps1SecondaryMax | ||
| ) |
Definition at line 447 of file default_base_engine.cpp.

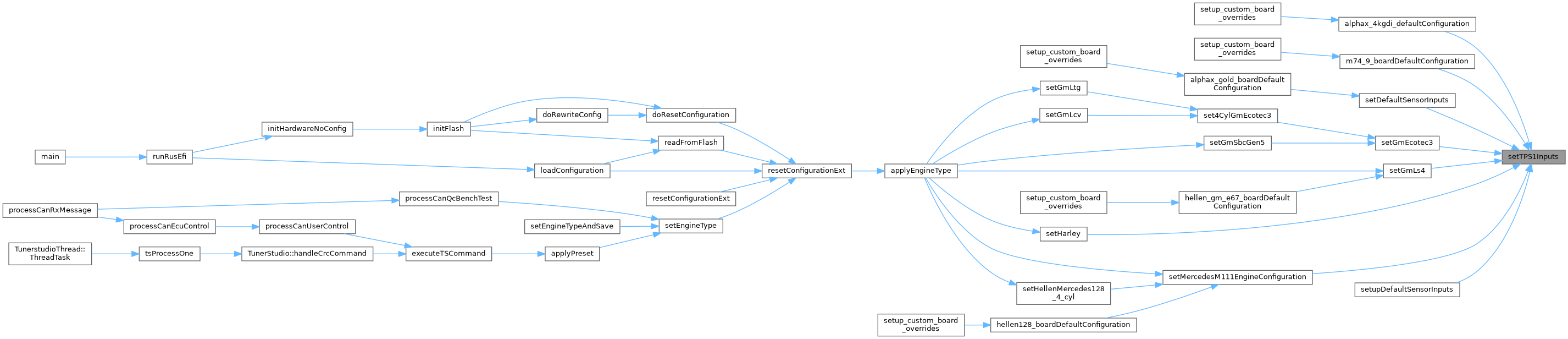
◆ setTPS1Inputs()
| void setTPS1Inputs | ( | adc_channel_e | tps1, |
| adc_channel_e | tps2 | ||
| ) |
Definition at line 437 of file default_base_engine.cpp.
Referenced by alphax_4kgdi_defaultConfiguration(), m74_9_boardDefaultConfiguration(), setDefaultSensorInputs(), setGmEcotec3(), setGmLs4(), setHarley(), setMercedesM111EngineConfiguration(), and setupDefaultSensorInputs().

◆ setupTLE9201()
Definition at line 488 of file default_base_engine.cpp.
Referenced by alphax_4chan_defaultConfiguration(), alphax_4kgdi_boardConfigOverrides(), alphax_8chan_defaultConfiguration(), alphax_8chan_reva_boardDefaultConfiguration(), hellen154hyundai_f7_boardConfigOverrides(), hellen_gm_e67_boardConfigOverrides(), setupEtb(), and setupTLE9201IncludingStepper().


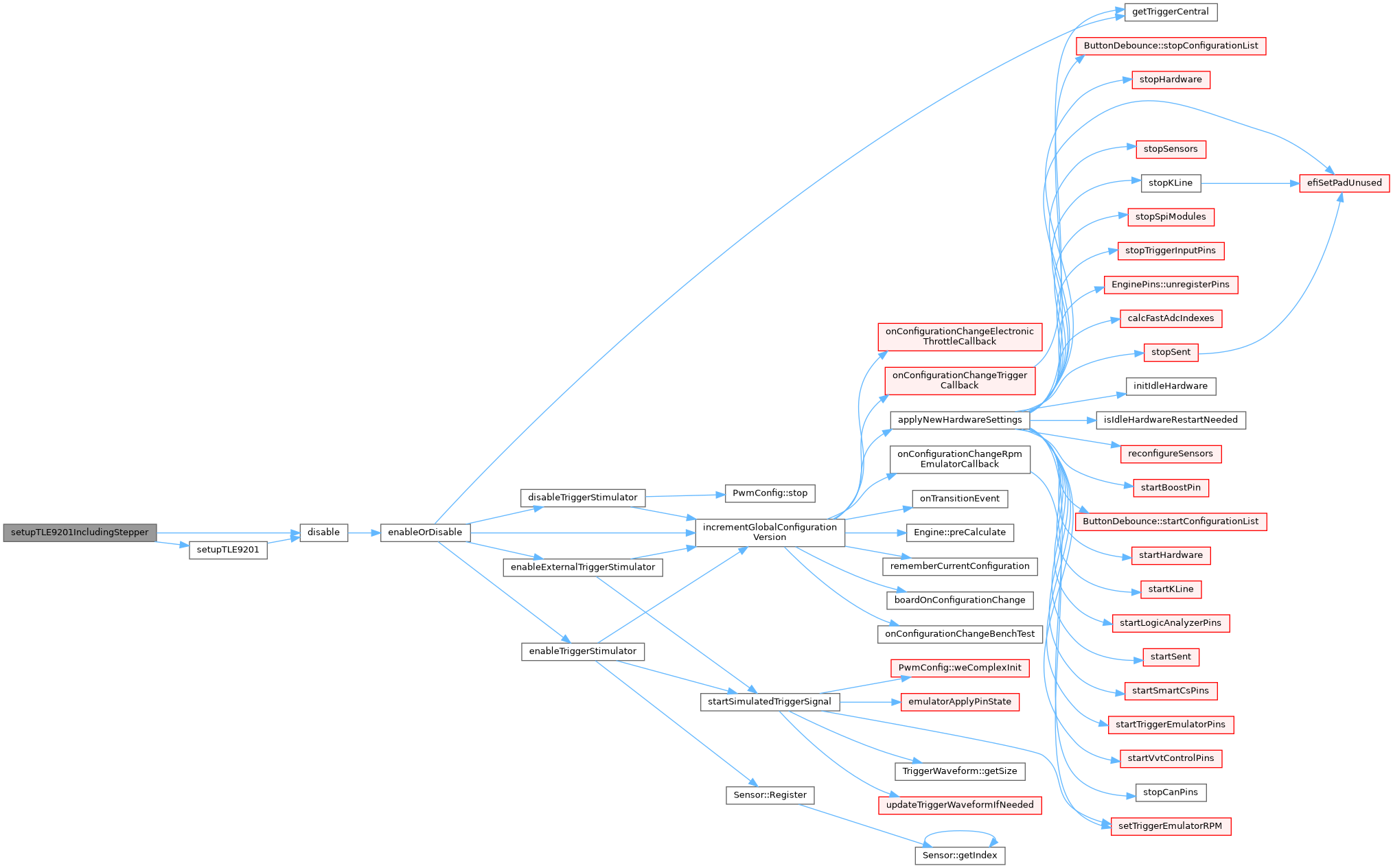
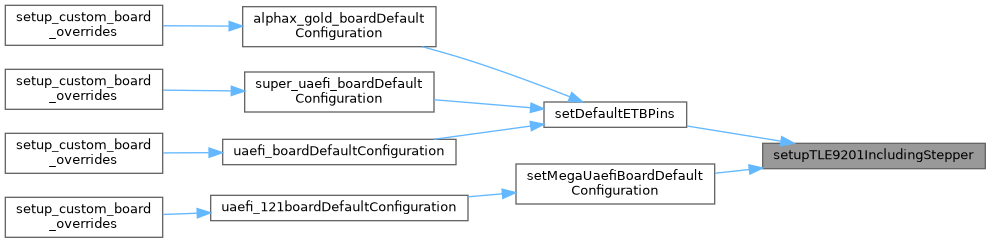
◆ setupTLE9201IncludingStepper()
Definition at line 506 of file default_base_engine.cpp.
Referenced by setDefaultETBPins(), and setMegaUaefiBoardDefaultConfiguration().