Detailed Description
Configuration defaults for the hellen128 board.
All fabricated boards use 176 pin MCU
See https://rusefi.com/s/hellen128
Definition in file board_configuration.cpp.
Functions | |
| static void | setInjectorPins () |
| static void | setIgnitionPins () |
| static void | setupDefaultSensorInputs () |
| static void | setHellen128ETBConfig () |
| static void | hellen128_boardConfigOverrides () |
| static void | hellen128_boardDefaultConfiguration () |
| Board-specific configuration defaults. | |
| void | setup_custom_board_overrides () |
Variables | |
| static bool | isFirstInvocation = true |
Function Documentation
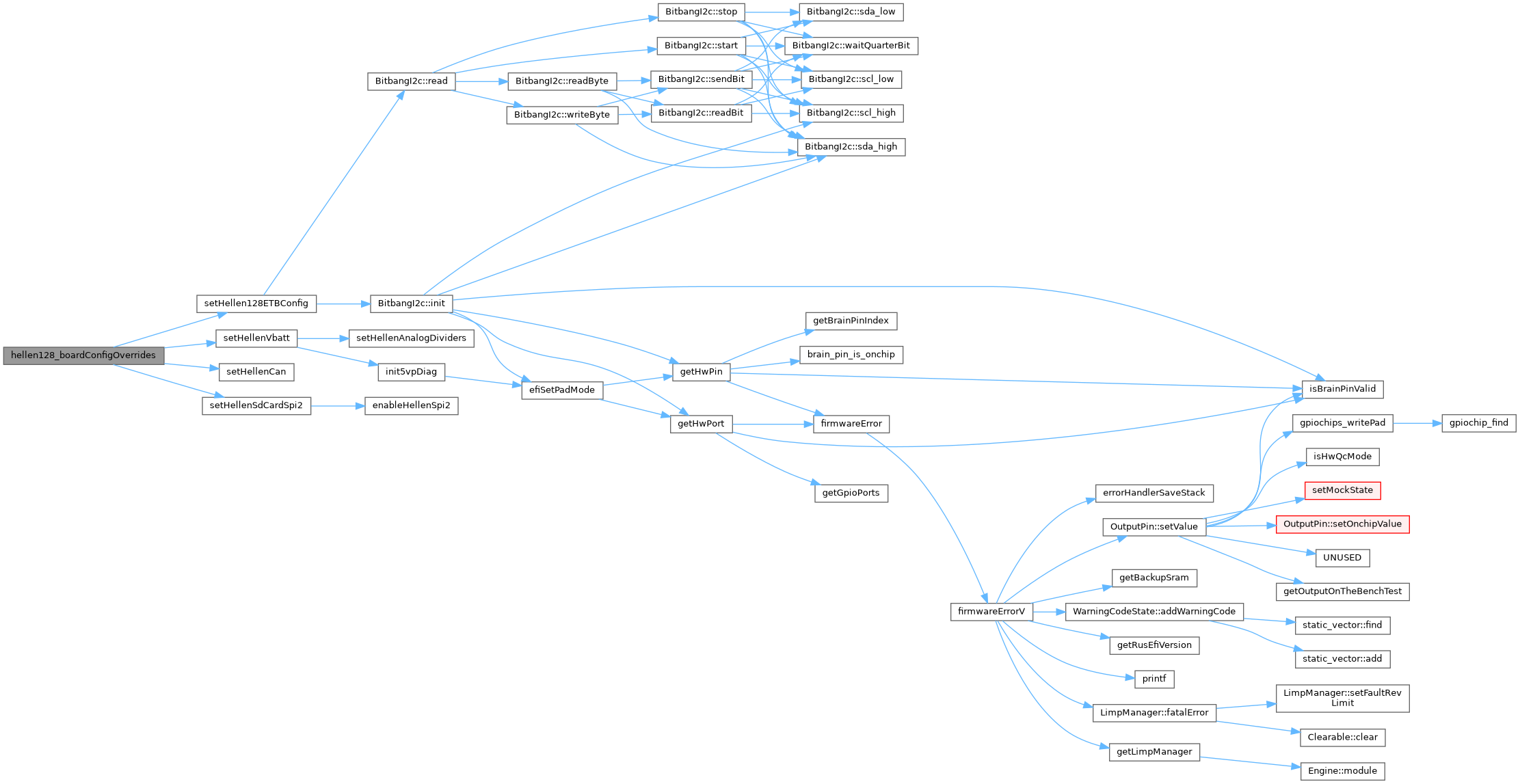
◆ hellen128_boardConfigOverrides()
|
static |
Definition at line 118 of file board_configuration.cpp.
Referenced by setup_custom_board_overrides().

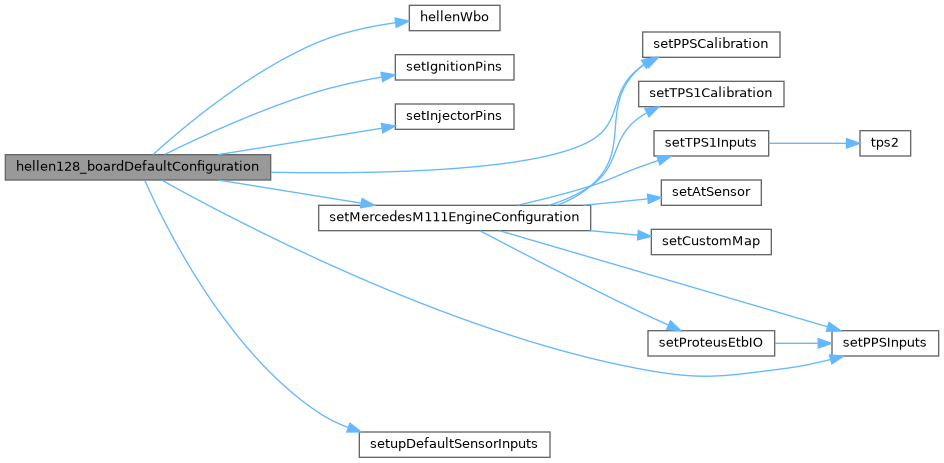
◆ hellen128_boardDefaultConfiguration()
|
static |
Board-specific configuration defaults.
See also setDefaultEngineConfiguration
Jimmy best tune https://rusefi.com/online/view.php?msq=626 md_sanci latest tune https://rusefi.com/online/view.php?msq=630
Definition at line 139 of file board_configuration.cpp.
Referenced by setup_custom_board_overrides().

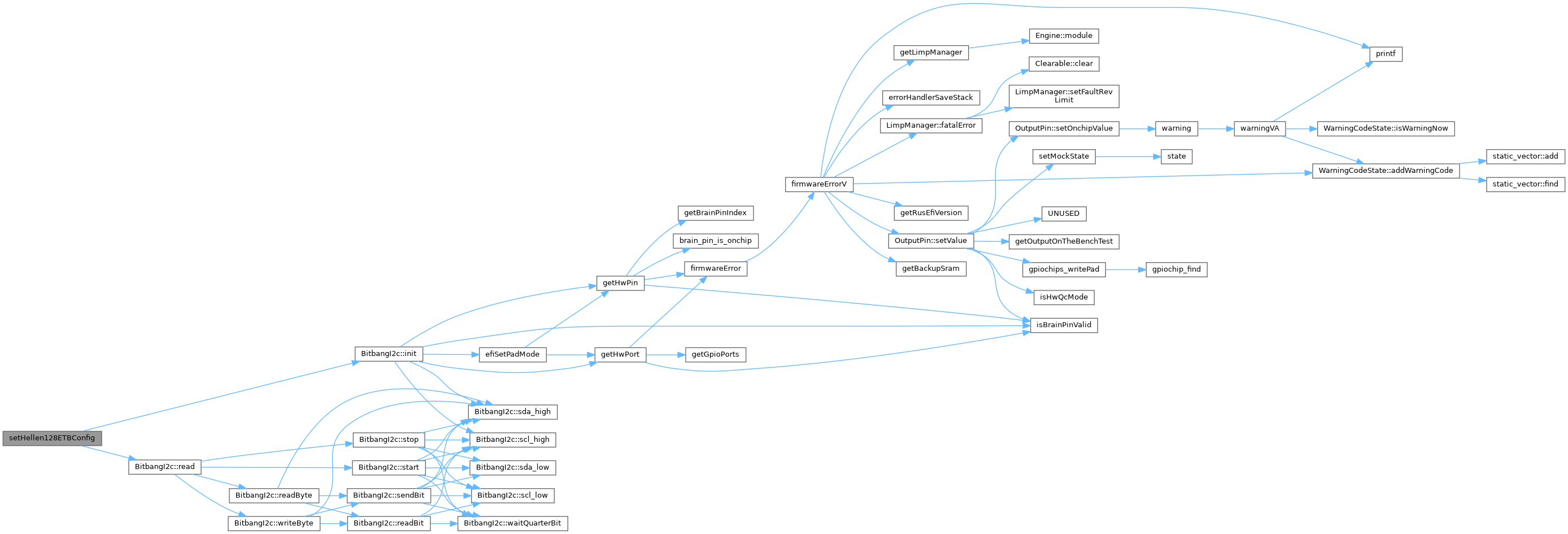
◆ setHellen128ETBConfig()
|
static |
Definition at line 62 of file board_configuration.cpp.
Referenced by hellen128_boardConfigOverrides().

◆ setIgnitionPins()
|
static |
Definition at line 32 of file board_configuration.cpp.
◆ setInjectorPins()
|
static |
Definition at line 21 of file board_configuration.cpp.
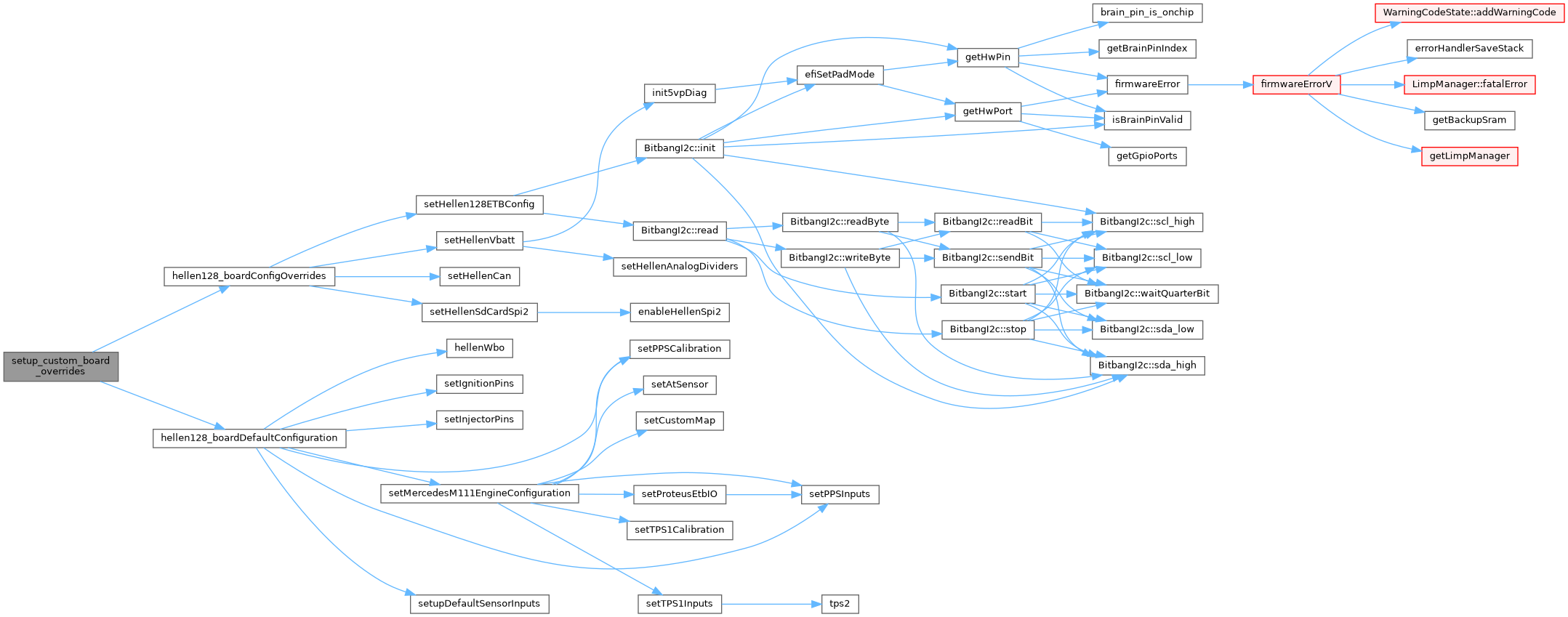
◆ setup_custom_board_overrides()
| void setup_custom_board_overrides | ( | ) |
Definition at line 170 of file board_configuration.cpp.
◆ setupDefaultSensorInputs()
|
static |
Definition at line 43 of file board_configuration.cpp.

Variable Documentation
◆ isFirstInvocation
|
static |
Definition at line 60 of file board_configuration.cpp.
Referenced by getBoardRevision(), hellen154_hyundai_boardConfigOverrides(), and setHellen128ETBConfig().