Detailed Description
Configuration defaults for the hellen-gm-e67 board.
Definition in file board_configuration.cpp.
Functions | |
| static void | setInjectorPins () |
| static void | setIgnitionPins () |
| static void | setupDefaultSensorInputs () |
| static void | hellen_gm_e67_boardConfigOverrides () |
| static void | hellen_gm_e67_boardDefaultConfiguration () |
| Board-specific configuration defaults. | |
| void | setup_custom_board_overrides () |
Function Documentation
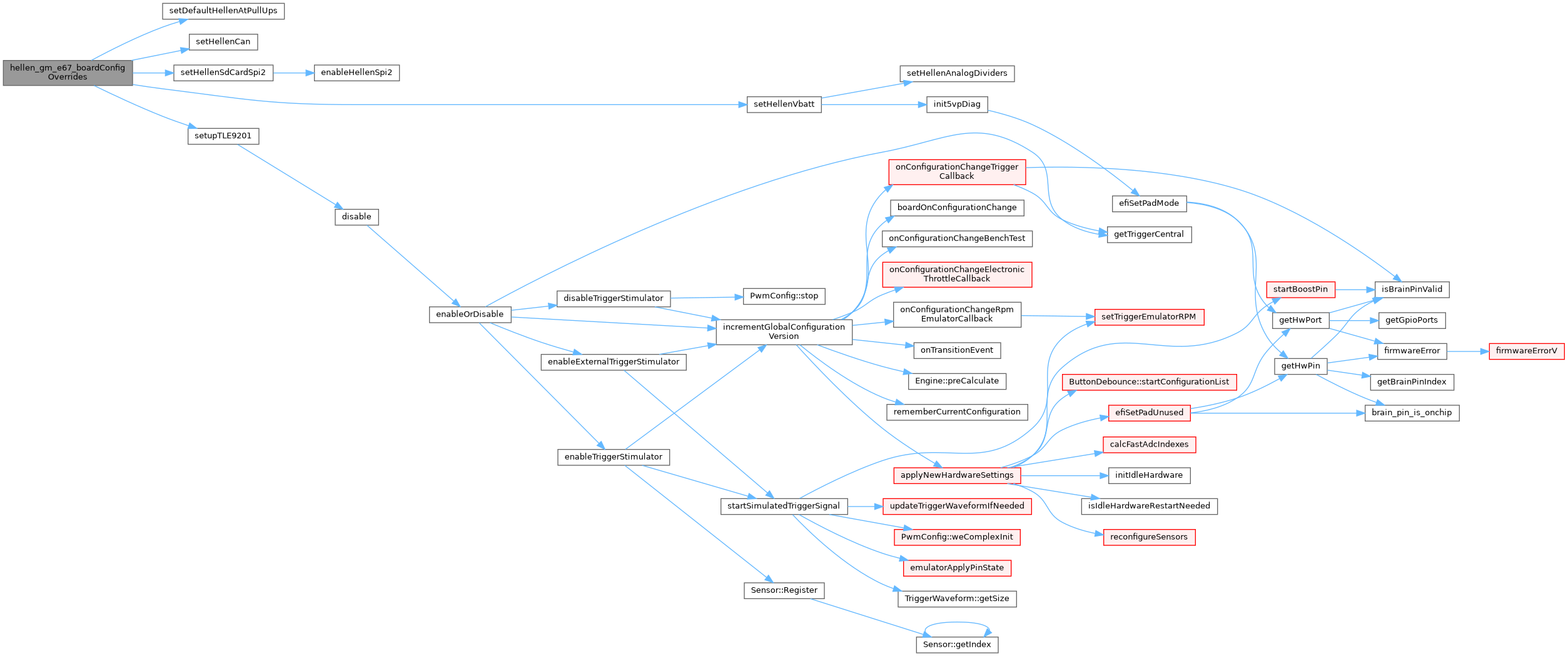
◆ hellen_gm_e67_boardConfigOverrides()
|
static |
Definition at line 66 of file board_configuration.cpp.
66 {
67 setHellenVbatt();
68
69 setHellenSdCardSpi2();
71
72 setHellenCan();
73
75}
void setupTLE9201(Gpio controlPin, Gpio direction, Gpio disable, int dcIndex)
Definition default_base_engine.cpp:488
void setDefaultHellenAtPullUps(float pullup=HELLEN_DEFAULT_AT_PULLUP)
Definition hellen_logic.h:101
Referenced by setup_custom_board_overrides().
Here is the call graph for this function:
Here is the caller graph for this function:

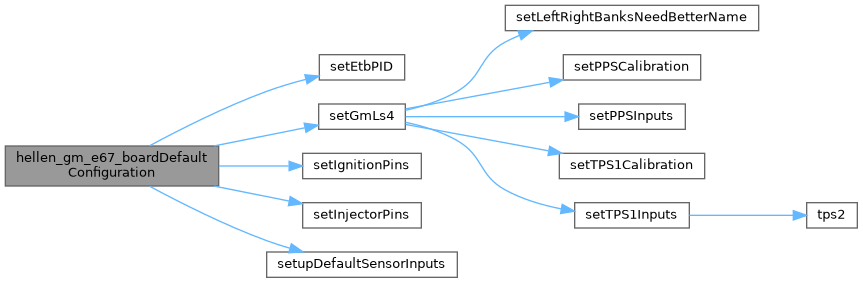
◆ hellen_gm_e67_boardDefaultConfiguration()
|
static |
Board-specific configuration defaults.
See also setDefaultEngineConfiguration
Definition at line 84 of file board_configuration.cpp.
84 {
85 setInjectorPins();
86 setIgnitionPins();
87
89
91
93
96// engineConfiguration->acSwitch =
97// engineConfiguration->acRelayPin =
103// engineConfiguration->fan2Pin =
104
105 // "required" hardware is done - set some reasonable defaults
106 setupDefaultSensorInputs();
107
108 setGmLs4();
109 setEtbPID(7.4320, 117.6542, 0.0766);
110
112
114
116
120// ? engineConfiguration->malfunctionIndicatorPin = Gpio::G4; //1E - Check Engine Light
121
122}
static constexpr engine_configuration_s * engineConfiguration
Definition engine_configuration.h:80
bool enableSoftwareKnock
output_pin_e fuelPumpPin
pin_input_mode_e clutchDownPinMode
output_pin_e boostControlPin
ignition_mode_e ignitionMode
switch_input_pin_e clutchDownPin
launchActivationMode_e launchActivationMode
output_pin_e fanPin
output_pin_e mainRelayPin
bool invertPrimaryTriggerSignal
output_pin_e tachOutputPin
switch_input_pin_e brakePedalPin
output_pin_e alternatorControlPin
injection_mode_e injectionMode
output_pin_e luaOutputPins[LUA_PWM_COUNT]
Referenced by setup_custom_board_overrides().
Here is the call graph for this function:
Here is the caller graph for this function:

◆ setIgnitionPins()
|
static |
Definition at line 33 of file board_configuration.cpp.
33 {
42}
output_pin_e ignitionPins[MAX_CYLINDER_COUNT]
◆ setInjectorPins()
|
static |
Definition at line 17 of file board_configuration.cpp.
17 {
26
31}
@ C4
output_pin_e injectionPins[MAX_CYLINDER_COUNT]
output_pin_e malfunctionIndicatorPin
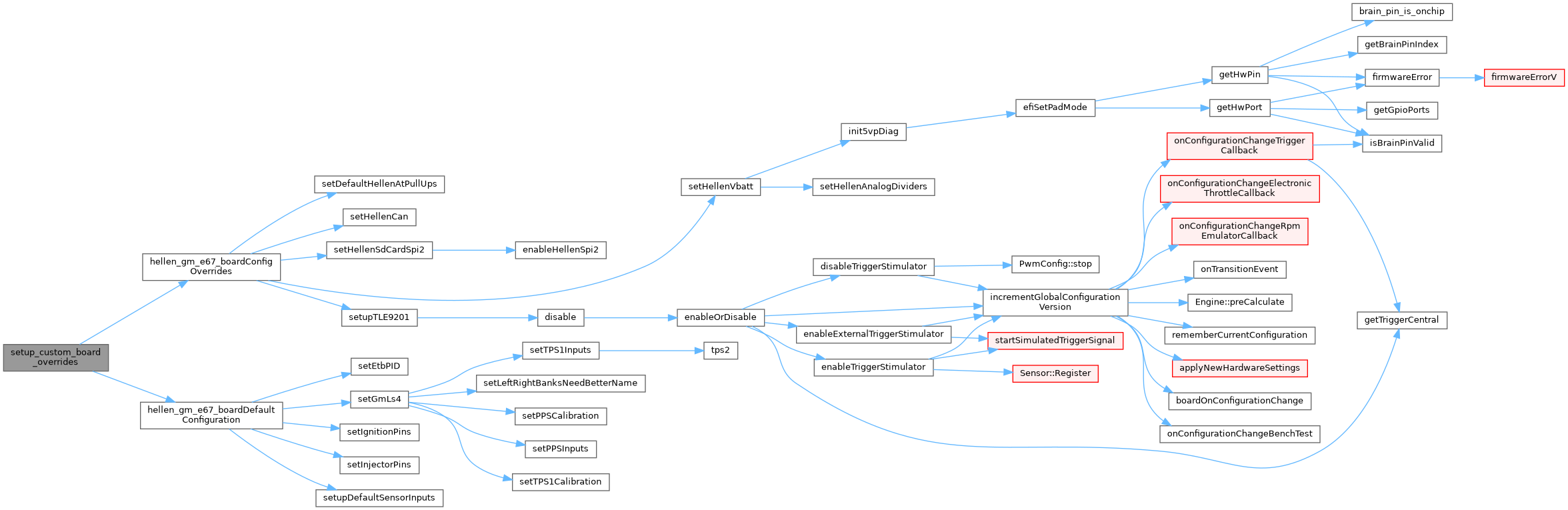
◆ setup_custom_board_overrides()
| void setup_custom_board_overrides | ( | ) |
Definition at line 124 of file board_configuration.cpp.
124 {
127}
std::optional< setup_custom_board_overrides_type > custom_board_ConfigOverrides
Definition engine_configuration.cpp:71
std::optional< setup_custom_board_overrides_type > custom_board_DefaultConfiguration
Definition engine_configuration.cpp:70
static void hellen_gm_e67_boardConfigOverrides()
Definition board_configuration.cpp:66
static void hellen_gm_e67_boardDefaultConfiguration()
Board-specific configuration defaults.
Definition board_configuration.cpp:84
Here is the call graph for this function:
◆ setupDefaultSensorInputs()
|
static |
Definition at line 44 of file board_configuration.cpp.
44 {
45 // trigger inputs, hall
49
50 setTPS1Inputs(H144_IN_TPS, H144_IN_AUX1);
51
52 setPPSInputs(H144_IN_PPS, H144_IN_AUX2);
53
56
58
60
62}
@ Unassigned
void setPPSInputs(adc_channel_e pps1, adc_channel_e pps2)
Definition default_base_engine.cpp:432
void setTPS1Inputs(adc_channel_e tps1, adc_channel_e tps2)
Definition default_base_engine.cpp:437
air_pressure_sensor_config_s sensor
adc_channel_e adcChannel
adc_channel_e hwChannel
adc_channel_e hwChannel
MAP_sensor_config_s map
afr_sensor_s afr
ThermistorConf iat
ThermistorConf clt
brain_input_pin_e triggerInputPins[TRIGGER_INPUT_PIN_COUNT]
adc_channel_e mafAdcChannel
brain_input_pin_e camInputs[CAM_INPUTS_COUNT]
Here is the call graph for this function:
