Detailed Description
- Date
- Dec 7, 2013
Definition in file electronic_throttle.h.
Data Structures | |
| class | IEtbController |
Enumerations | |
| enum class | EtbState : uint8_t { Uninitialized , Autotune , NoMotor , NotEbt , LimpProhibited , Paused , NoOutput , Active , NoPedal , FailFast , InInit , SuccessfulInit } |
Functions | |
| void | initElectronicThrottle () |
| void | doInitElectronicThrottle (bool isStartupInit) |
| void | setEtbIdlePosition (percent_t pos) |
| void | setEtbWastegatePosition (percent_t pos) |
| void | setEtbLuaAdjustment (percent_t adjustment) |
| void | setEwgLuaAdjustment (percent_t pos) |
| void | setHitachiEtbCalibration () |
| void | blinkEtbErrorCodes (bool blinkPhase) |
| void | setToyota89281_33010_pedal_position_sensor () |
| void | setBoschVAGETB () |
| void | setDefaultEtbBiasCurve () |
| void | setDefaultEtbParameters () |
| void | setBoschVNH2SP30Curve () |
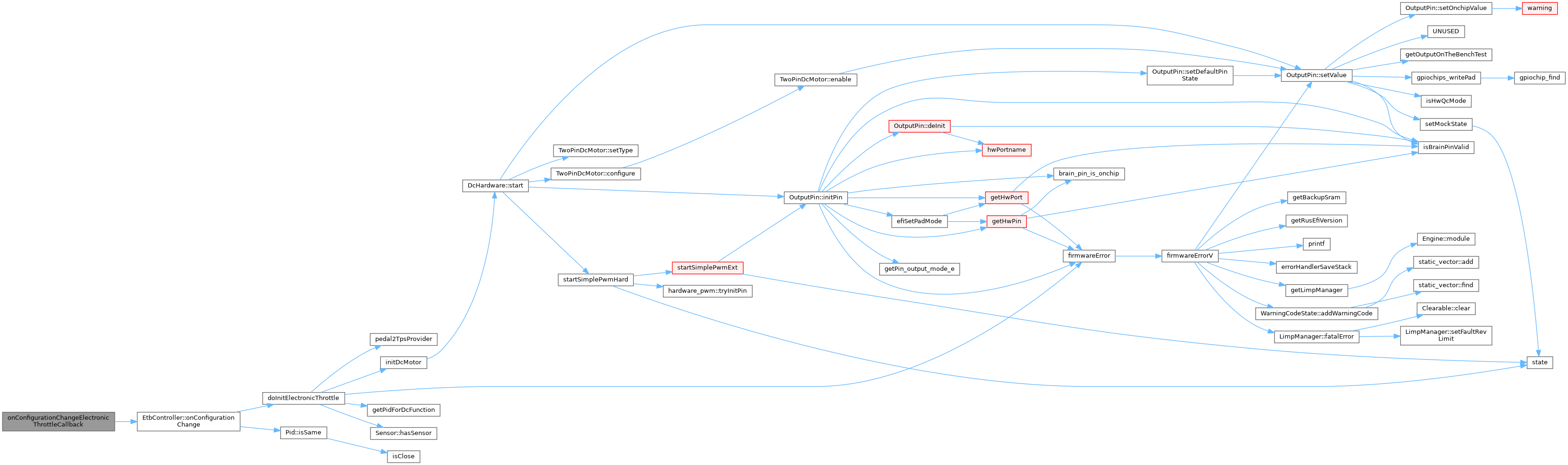
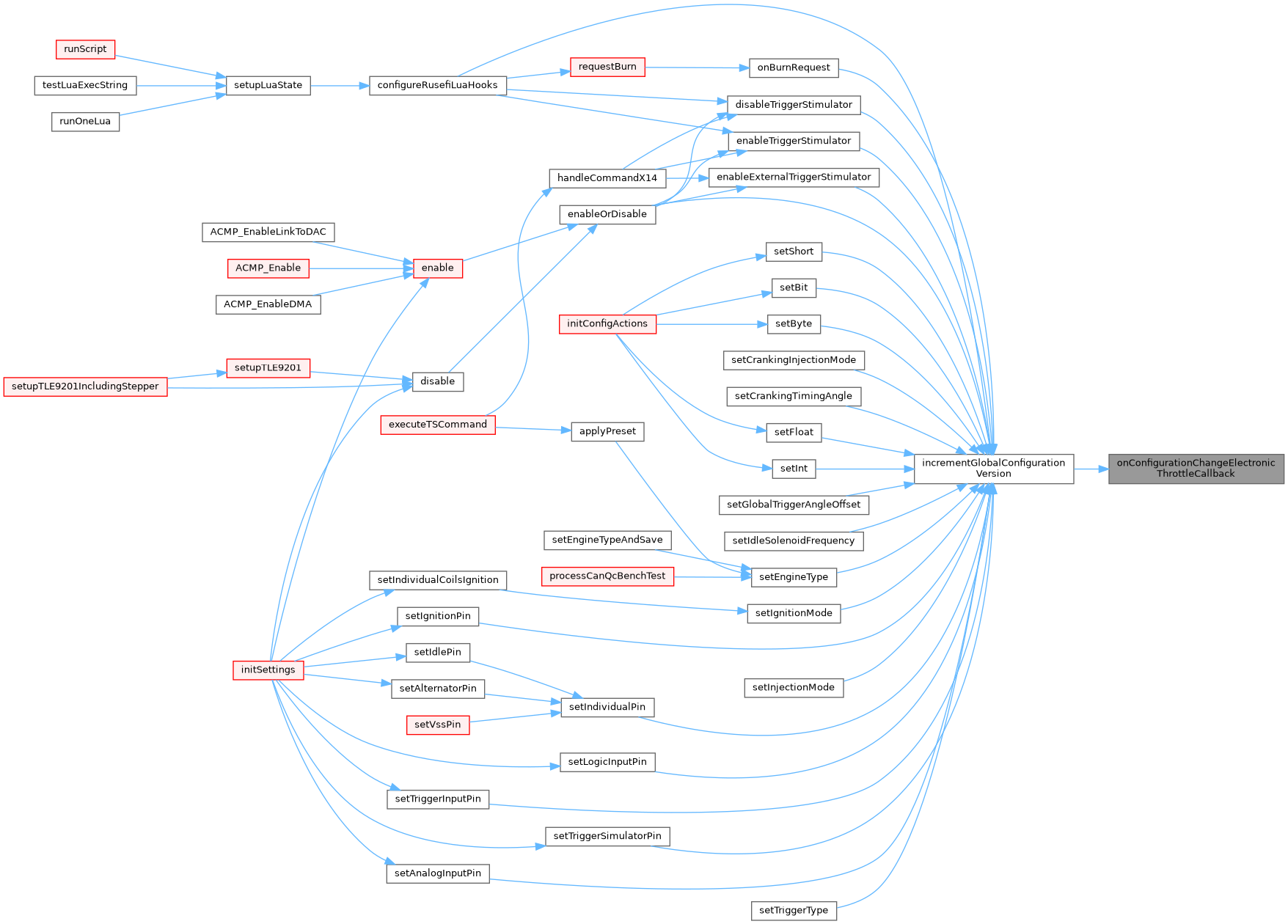
| void | onConfigurationChangeElectronicThrottleCallback (engine_configuration_s *previousConfiguration) |
| void | unregisterEtbPins () |
| void | setProteusHitachiEtbDefaults () |
| void | etbAutocal (dc_function_e function, bool reportToTs=true) |
| EtbStatus | etbGetState (size_t throttleIndex) |
| float | getSanitizedPedal () |
Enumeration Type Documentation
◆ EtbState
|
strong |
| Enumerator | |
|---|---|
| Uninitialized | |
| Autotune | |
| NoMotor | |
| NotEbt | |
| LimpProhibited | |
| Paused | |
| NoOutput | |
| Active | |
| NoPedal | |
| FailFast | |
| InInit | |
| SuccessfulInit | |
Definition at line 43 of file electronic_throttle.h.
Function Documentation
◆ blinkEtbErrorCodes()
| void blinkEtbErrorCodes | ( | bool | blinkPhase | ) |
Definition at line 733 of file electronic_throttle.cpp.
Referenced by updateTunerStudioState().


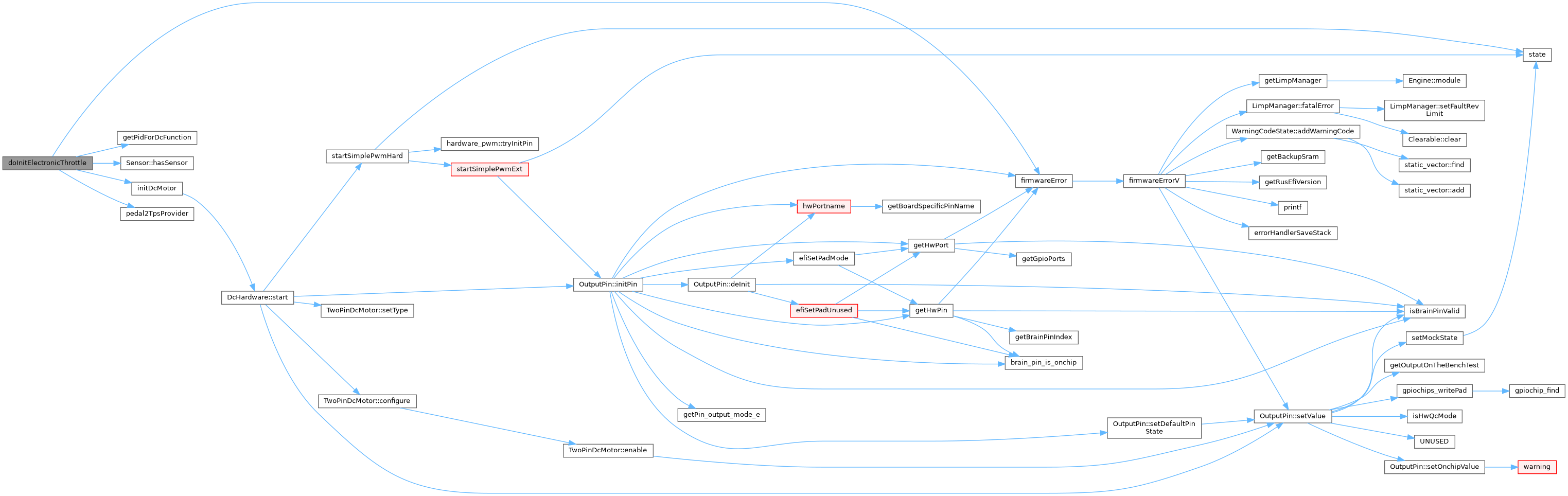
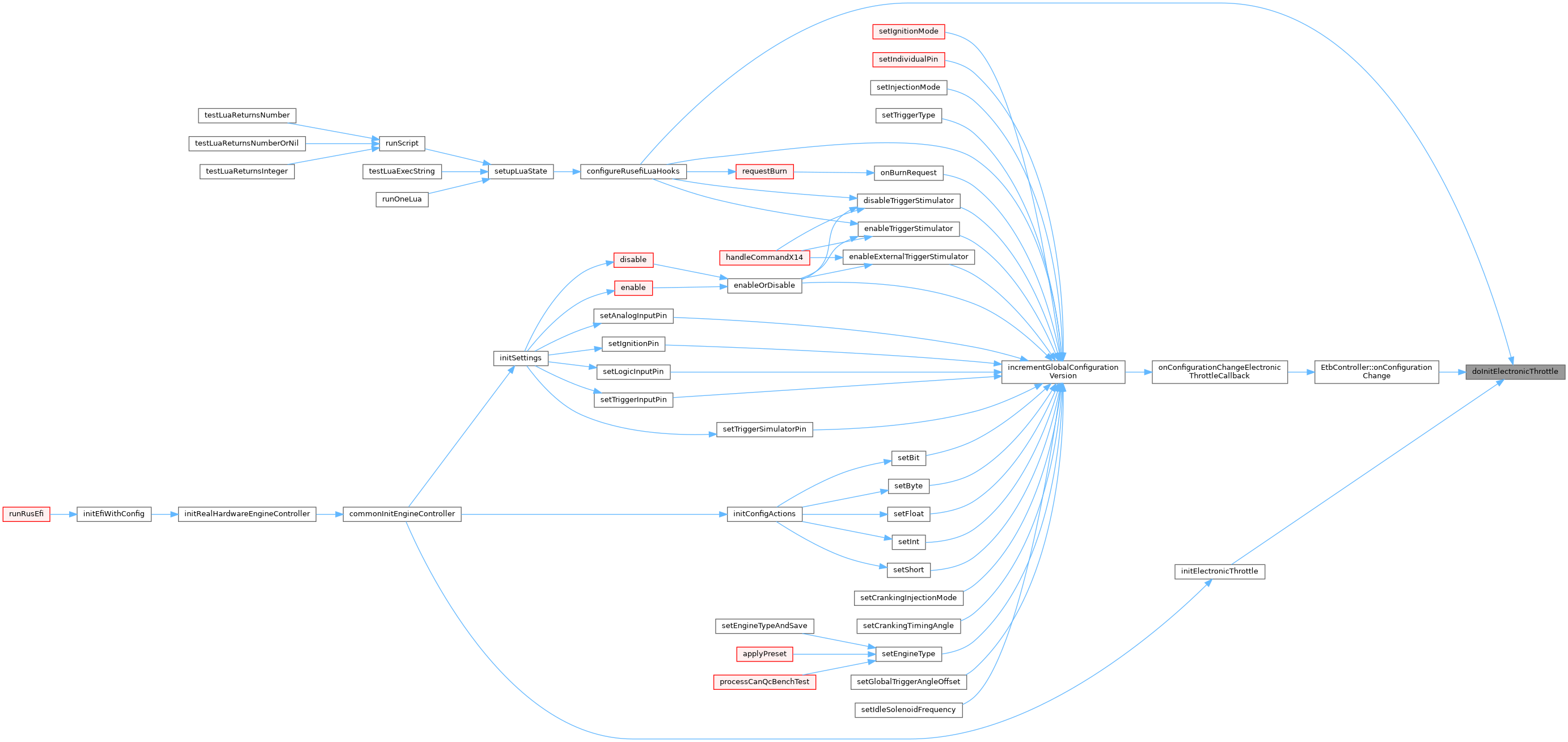
◆ doInitElectronicThrottle()
| void doInitElectronicThrottle | ( | bool | isStartupInit | ) |
Unexpected electronic throttle start-up position is worth a critical error
Definition at line 898 of file electronic_throttle.cpp.
Referenced by configureRusefiLuaHooks(), initElectronicThrottle(), and EtbController::onConfigurationChange().
◆ etbAutocal()
| void etbAutocal | ( | dc_function_e | function, |
| bool | reportToTs = true |
||
| ) |
Definition at line 774 of file electronic_throttle.cpp.
Referenced by handleCommandX14(), and initElectronicThrottle().

◆ etbGetState()
Definition at line 789 of file electronic_throttle.cpp.
◆ getSanitizedPedal()
| float getSanitizedPedal | ( | ) |
Definition at line 291 of file electronic_throttle.cpp.
Referenced by EtbController::getSetpointEtb().


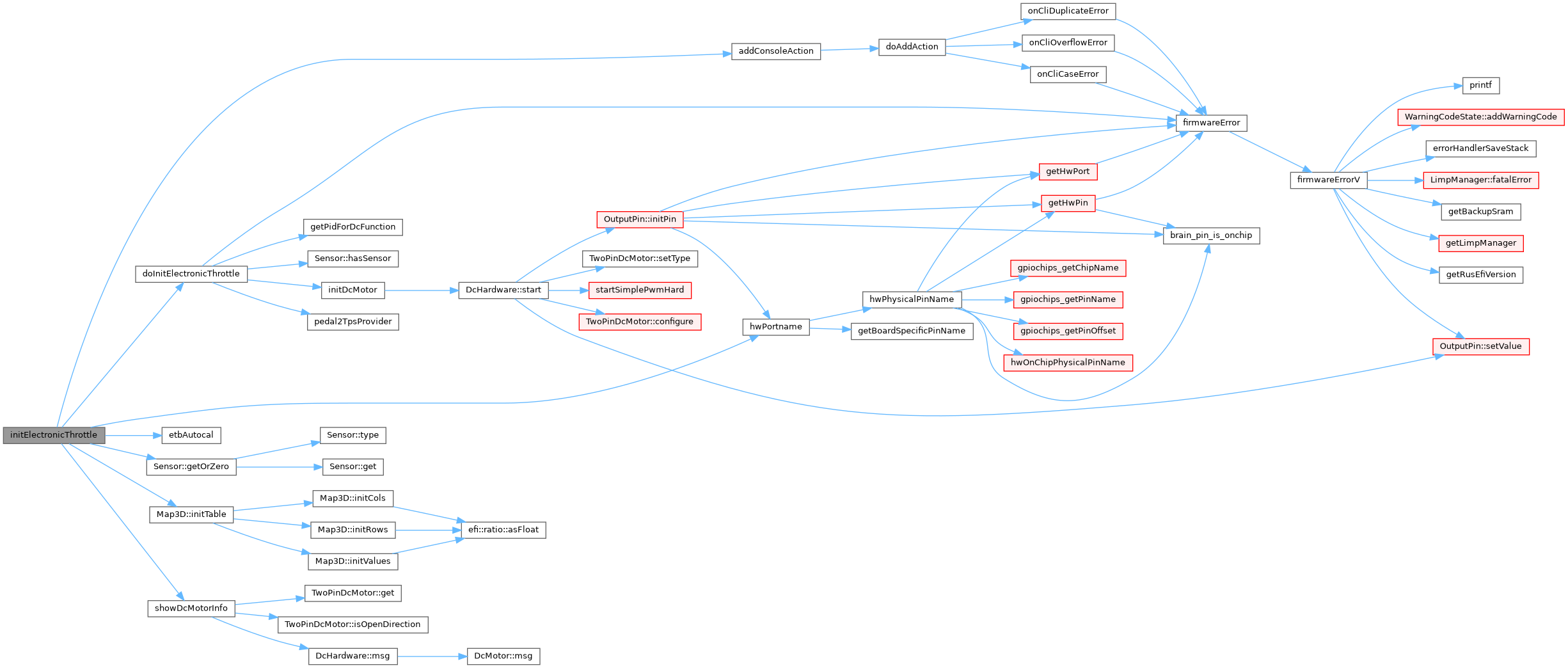
◆ initElectronicThrottle()
| void initElectronicThrottle | ( | ) |
Definition at line 952 of file electronic_throttle.cpp.
Referenced by commonInitEngineController().

◆ onConfigurationChangeElectronicThrottleCallback()
| void onConfigurationChangeElectronicThrottleCallback | ( | engine_configuration_s * | previousConfiguration | ) |
Definition at line 863 of file electronic_throttle.cpp.
Referenced by incrementGlobalConfigurationVersion().
◆ setBoschVAGETB()
| void setBoschVAGETB | ( | ) |
Definition at line 808 of file electronic_throttle.cpp.
Referenced by commonPassatB6(), and hellen121_vag_boardDefaultConfiguration().

◆ setBoschVNH2SP30Curve()
| void setBoschVNH2SP30Curve | ( | ) |
Definition at line 821 of file electronic_throttle.cpp.
Referenced by setEtbTestConfiguration().

◆ setDefaultEtbBiasCurve()
| void setDefaultEtbBiasCurve | ( | ) |
Definition at line 876 of file electronic_throttle.cpp.
Referenced by setDefaultEngineConfiguration().

◆ setDefaultEtbParameters()
| void setDefaultEtbParameters | ( | ) |
Definition at line 826 of file electronic_throttle.cpp.
Referenced by setDefaultEngineConfiguration().


◆ setEtbIdlePosition()
| void setEtbIdlePosition | ( | percent_t | pos | ) |
Definition at line 996 of file electronic_throttle.cpp.
Referenced by applyIACposition().

◆ setEtbLuaAdjustment()
| void setEtbLuaAdjustment | ( | percent_t | adjustment | ) |
Definition at line 1014 of file electronic_throttle.cpp.
Referenced by configureRusefiLuaHooks().

◆ setEtbWastegatePosition()
| void setEtbWastegatePosition | ( | percent_t | pos | ) |
Definition at line 1005 of file electronic_throttle.cpp.
Referenced by BoostController::setOutput().

◆ setEwgLuaAdjustment()
| void setEwgLuaAdjustment | ( | percent_t | pos | ) |
Definition at line 1028 of file electronic_throttle.cpp.
Referenced by configureRusefiLuaHooks().

◆ setHitachiEtbCalibration()
| void setHitachiEtbCalibration | ( | ) |
Definition at line 1046 of file electronic_throttle.cpp.
Referenced by setProteusHitachiEtbDefaults().


◆ setProteusHitachiEtbDefaults()
| void setProteusHitachiEtbDefaults | ( | ) |
Definition at line 1066 of file electronic_throttle.cpp.
Referenced by setEngineBMW_M73_Proteus().


◆ setToyota89281_33010_pedal_position_sensor()
| void setToyota89281_33010_pedal_position_sensor | ( | ) |
Definition at line 1042 of file electronic_throttle.cpp.
Referenced by setHitachiEtbCalibration().


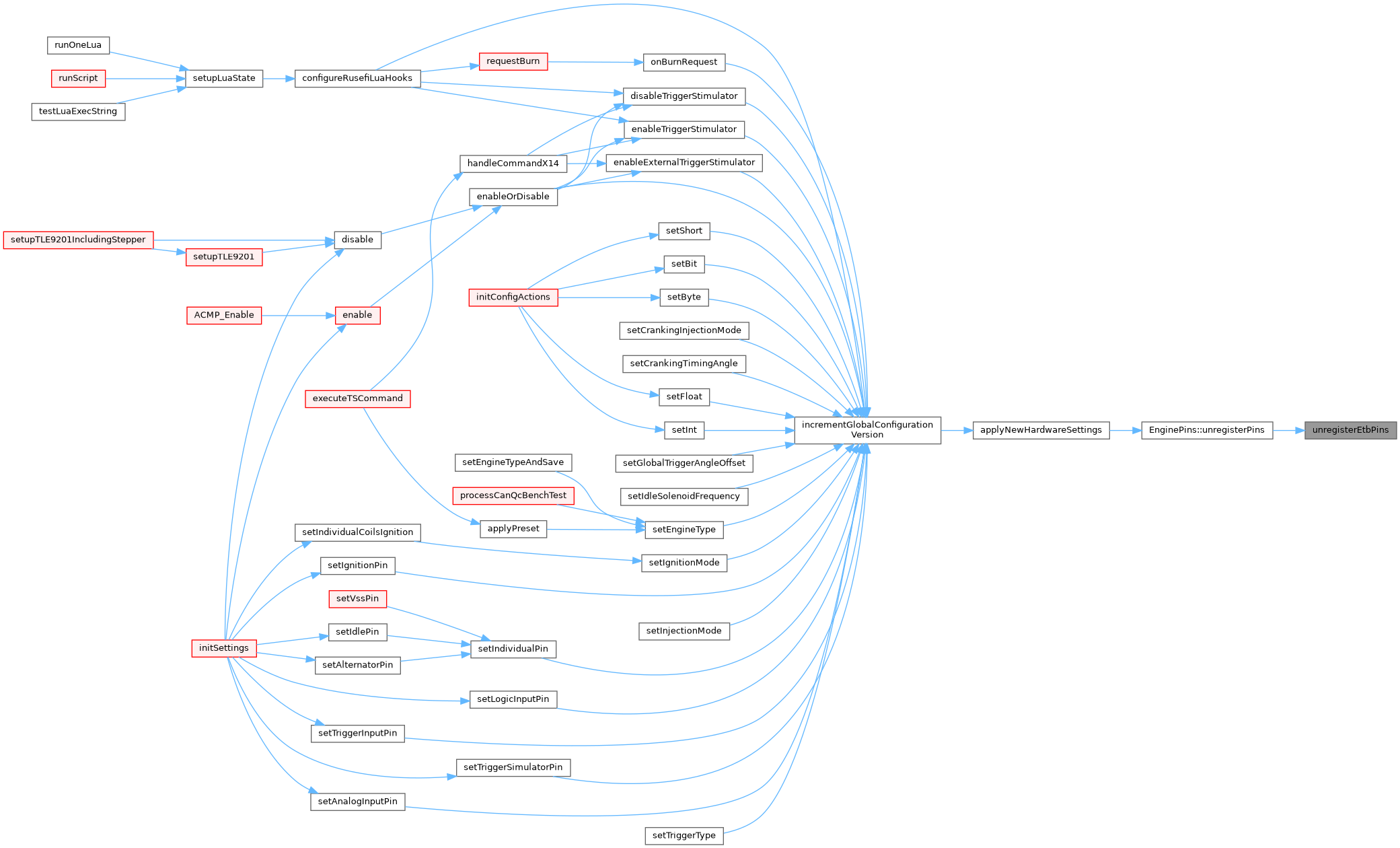
◆ unregisterEtbPins()
| void unregisterEtbPins | ( | ) |
Definition at line 883 of file electronic_throttle.cpp.
Referenced by EnginePins::unregisterPins().