Detailed Description
- Date
- March 3, 2020
Definition in file dc_motors.cpp.
Functions | |
| DcHardware * | getPrimaryDCHardwareForLogging () |
| DcMotor * | initDcMotor (const char *disPinMsg, const dc_io &io, size_t index, bool useTwoWires) |
| DcMotor * | initDcMotor (brain_pin_e coil_p, brain_pin_e coil_m, size_t index) |
| void | setDcMotorFrequency (size_t index, int hz) |
| void | setDcMotorDuty (size_t index, float duty) |
| void | showDcMotorInfo (int i) |
Variables | |
| static DcHardware | dcHardware [ETB_COUNT+DC_PER_STEPPER] |
Function Documentation
◆ getPrimaryDCHardwareForLogging()
| DcHardware * getPrimaryDCHardwareForLogging | ( | ) |
Definition at line 86 of file dc_motors.cpp.
86 {
88}
Referenced by updateTunerStudioState().
Here is the caller graph for this function:

◆ initDcMotor() [1/2]
| DcMotor * initDcMotor | ( | brain_pin_e | coil_p, |
| brain_pin_e | coil_m, | ||
| size_t | index | ||
| ) |
Definition at line 109 of file dc_motors.cpp.
109 {
111
112 hw.start(
113 true, /* useTwoWires */
115 coil_p,
116 coil_m,
117 nullptr,
122 );
123
124 return &hw.dcMotor;
125}
void start(bool useTwoWires, brain_pin_e pinEnable, brain_pin_e pinDir1, brain_pin_e pinDir2, const char *disPinMsg, brain_pin_e pinDisable, bool isInverted, Scheduler *executor, int frequency)
Definition dc_motors.cpp:12
@ Unassigned
static constexpr engine_configuration_s * engineConfiguration
Definition engine_configuration.h:80
int16_t etbFreq
bool stepperDcInvertedPins
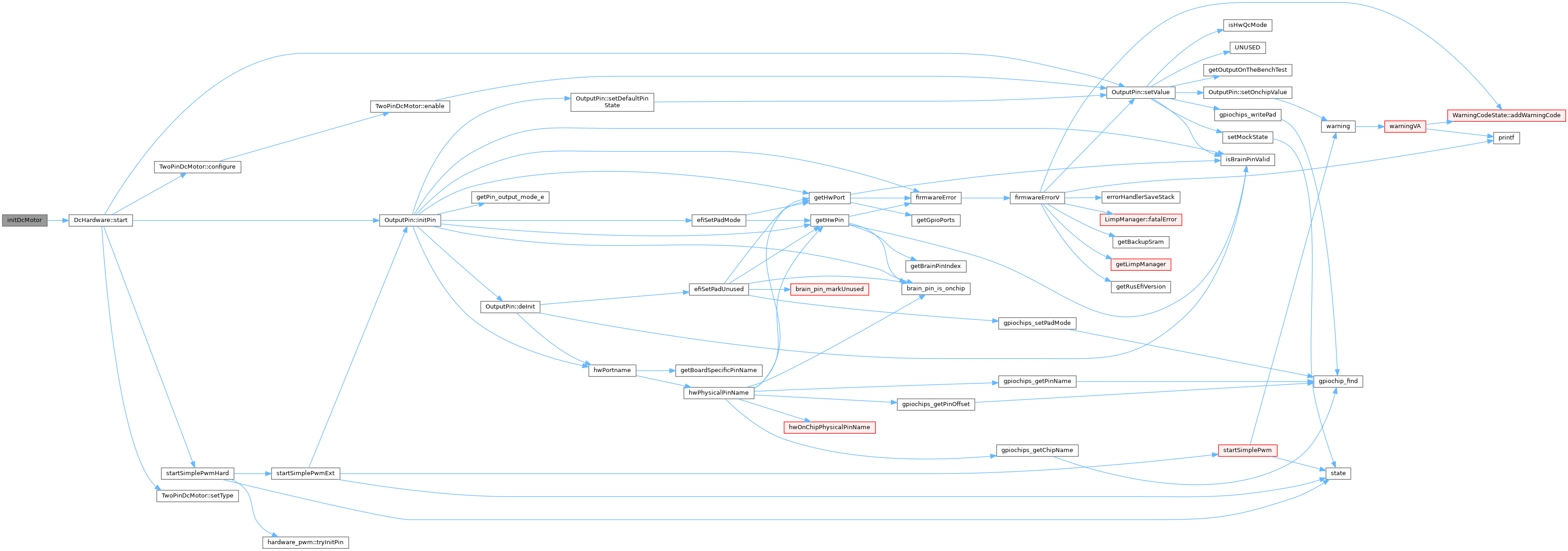
Here is the call graph for this function:
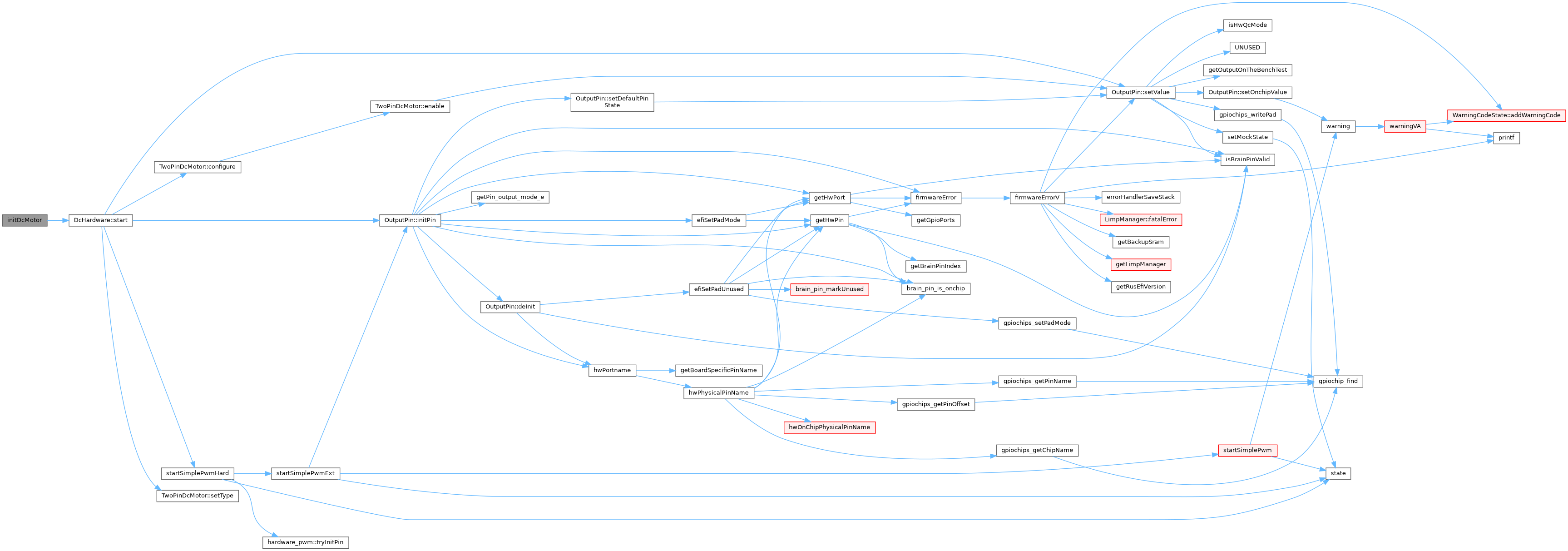
◆ initDcMotor() [2/2]
Definition at line 90 of file dc_motors.cpp.
90 {
92
93 hw.start(
94 useTwoWires,
95 io.controlPin,
96 io.directionPin1,
97 io.directionPin2,
98 disPinMsg,
99 io.disablePin,
100 // todo You would not believe how you invert TLE9201 #4579
104 );
105
106 return &hw.dcMotor;
107}
Gpio directionPin1
Gpio directionPin2
Gpio disablePin
Gpio controlPin
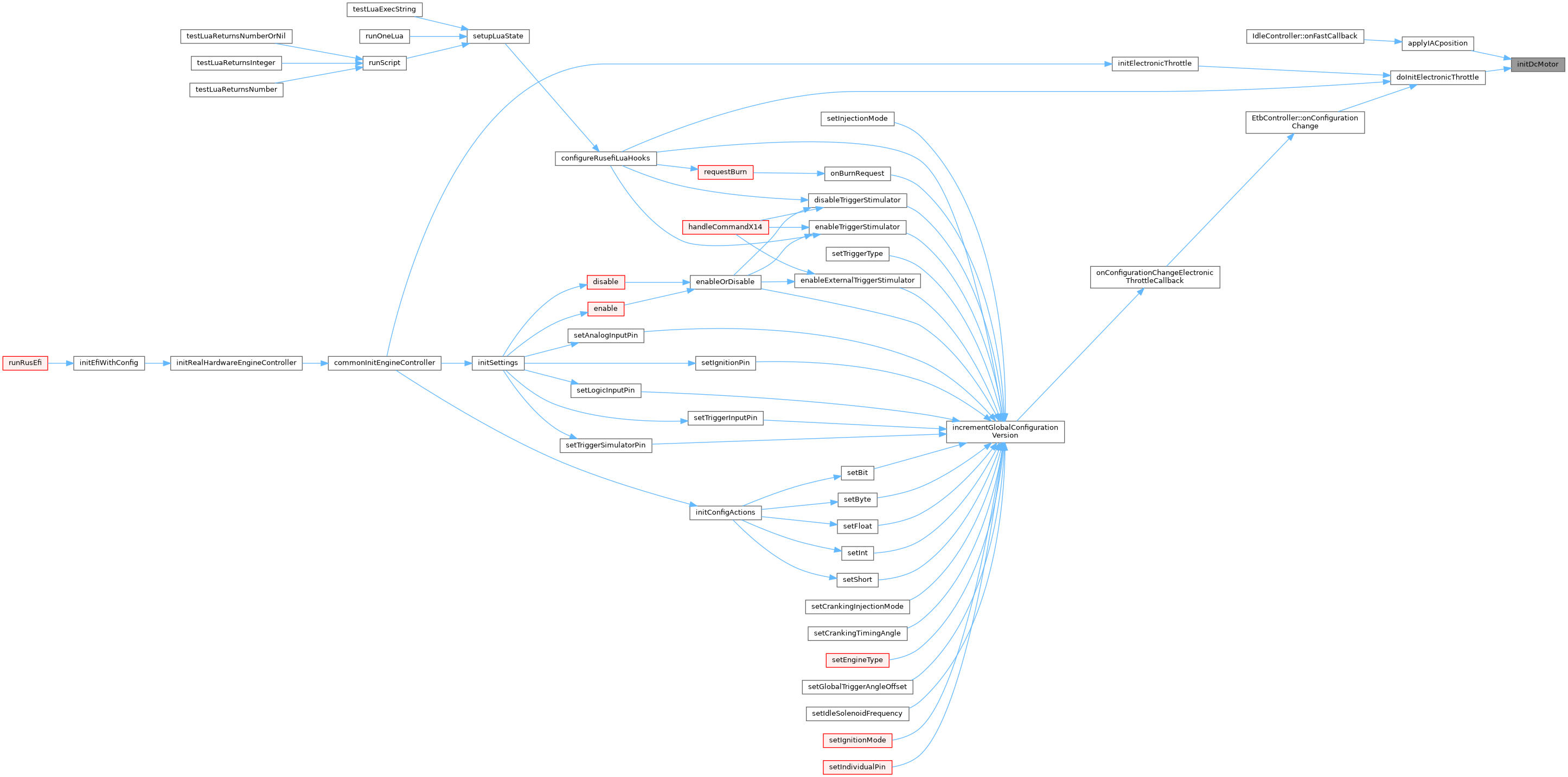
Referenced by applyIACposition(), and doInitElectronicThrottle().
Here is the call graph for this function:
Here is the caller graph for this function:
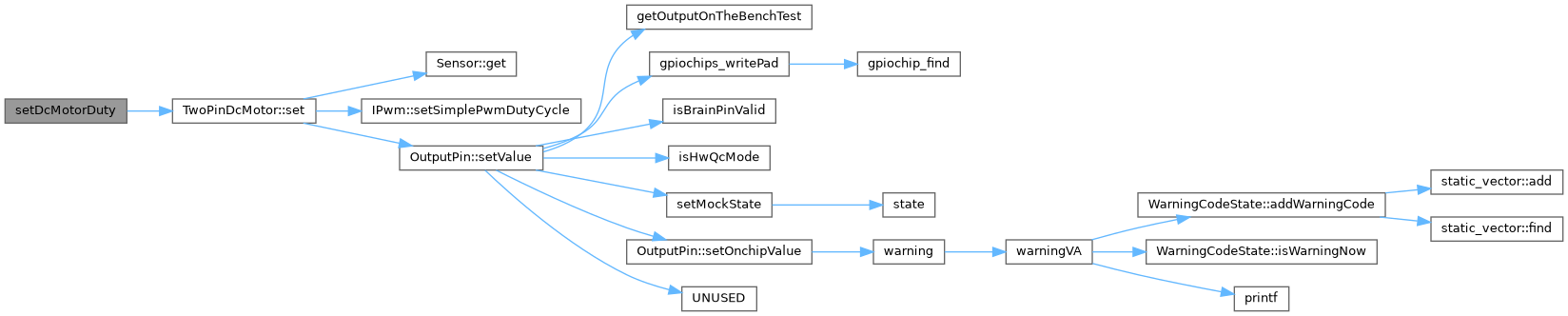
◆ setDcMotorDuty()
◆ setDcMotorFrequency()
| void setDcMotorFrequency | ( | size_t | index, |
| int | hz | ||
| ) |

◆ showDcMotorInfo()
| void showDcMotorInfo | ( | int | i | ) |
Definition at line 135 of file dc_motors.cpp.
135 {
137
140 if (disableMsg != nullptr) {
141 efiPrintf("disabled [%s]", disableMsg);
142 }
143}
Definition dc_motors.h:34
Referenced by initElectronicThrottle().
Here is the call graph for this function:
Here is the caller graph for this function:

Variable Documentation
◆ dcHardware
|
static |
Definition at line 84 of file dc_motors.cpp.
Referenced by getPrimaryDCHardwareForLogging(), initDcMotor(), initDcMotor(), setDcMotorDuty(), setDcMotorFrequency(), and showDcMotorInfo().