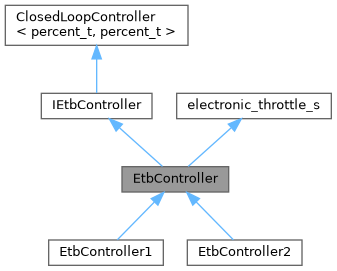
#include <electronic_throttle_impl.h>

Public Member Functions | |
| bool | init (dc_function_e function, DcMotor *motor, pid_s *pidParameters, const ValueProvider3D *pedalMap) override |
| void | setIdlePosition (percent_t pos) override |
| void | setWastegatePosition (percent_t pos) override |
| void | reset (const char *reason) override |
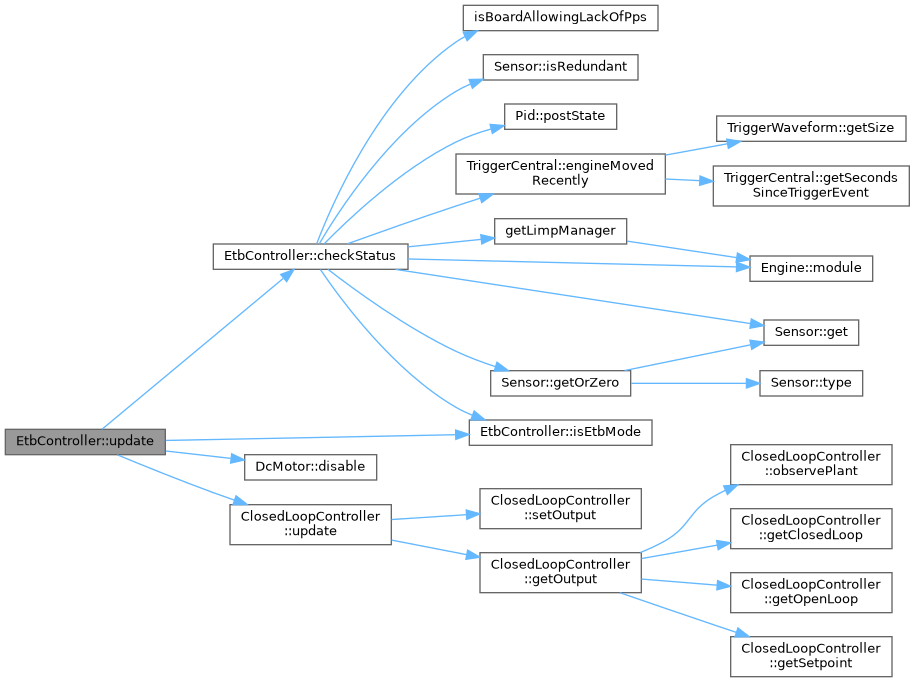
| void | update () override |
| void | onConfigurationChange (pid_s *previousConfiguration) |
| void | showStatus () |
| expected< percent_t > | observePlant () override |
| expected< percent_t > | getSetpoint () override |
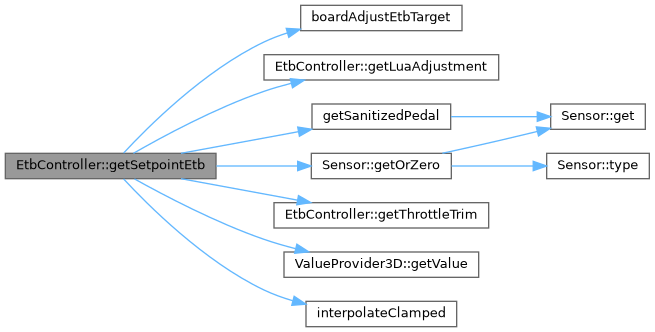
| expected< percent_t > | getSetpointEtb () |
| expected< percent_t > | getSetpointWastegate () const |
| expected< percent_t > | getSetpointIdleValve () const |
| expected< percent_t > | getOpenLoop (percent_t target) override |
| expected< percent_t > | getClosedLoop (percent_t setpoint, percent_t observation) override |
| expected< percent_t > | getClosedLoopAutotune (percent_t setpoint, percent_t actualThrottlePosition) |
| dc_function_e | getFunction () const |
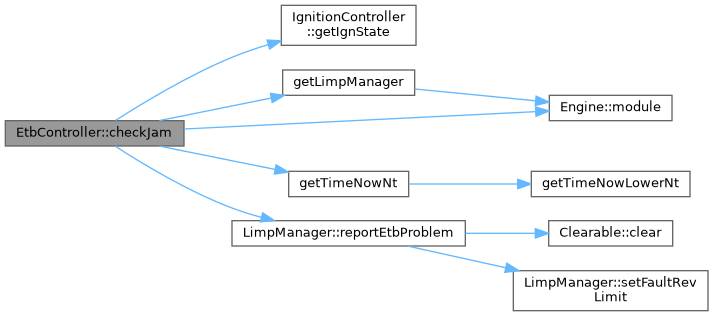
| void | checkJam (percent_t setpoint, percent_t observation) |
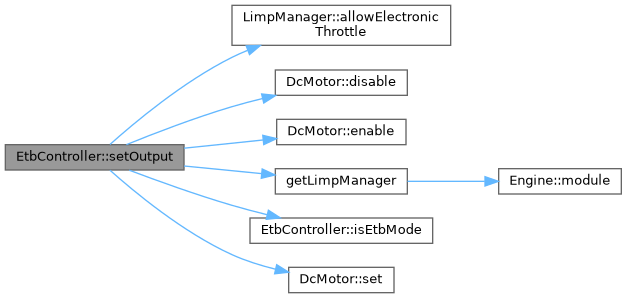
| void | setOutput (expected< percent_t > outputValue) override |
| const pid_state_s & | getPidState () const override |
| virtual percent_t | getThrottleTrim (float, percent_t) const |
| float | getCurrentTarget () const override |
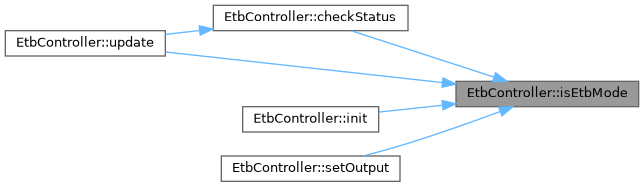
| bool | isEtbMode () const override |
| void | setLuaAdjustment (percent_t adjustment) override |
| float | getLuaAdjustment () const |
 Public Member Functions inherited from IEtbController Public Member Functions inherited from IEtbController | |
| virtual void | autoCalibrateTps (bool reportToTs=true) |
| Public Member Functions inherited from ClosedLoopController< percent_t, percent_t > | |
| void | update () |
Protected Member Functions | |
| DcMotor * | getMotor () |
Protected Attributes | |
| bool | hadTpsError = false |
| bool | hadPpsError = false |
Private Member Functions | |
| bool | checkStatus () |
Private Attributes | |
| dc_function_e | m_function = DC_None |
| SensorType | m_positionSensor = SensorType::Invalid |
| DcMotor * | m_motor = nullptr |
| Pid | m_pid |
| bool | m_shouldResetPid = false |
| ErrorAccumulator | m_targetErrorAccumulator |
| Timer | m_jamDetectTimer |
| const ValueProvider3D * | m_pedalProvider = nullptr |
| float | m_idlePosition = 0 |
| bool | m_isAutotune = false |
| bool | m_lastIsPositive = false |
| Timer | m_cycleTimer |
| float | m_minCycleTps = 0 |
| float | m_maxCycleTps = 0 |
| float | m_a = 8 |
| float | m_tu = 0.1f |
| uint8_t | m_autotuneCounter = 0 |
| uint8_t | m_autotuneCurrentParam = 0 |
| Timer | m_luaAdjustmentTimer |
| efitimeus_t | lastTickUs |
Detailed Description
Definition at line 28 of file electronic_throttle_impl.h.
Member Function Documentation
◆ checkJam()
Definition at line 690 of file electronic_throttle.cpp.
Referenced by getClosedLoop().

◆ checkStatus()
|
private |
- Returns
- true if OK, false if should be disabled
Definition at line 593 of file electronic_throttle.cpp.
Referenced by update().


◆ getClosedLoop()
|
overridevirtual |
Implements ClosedLoopController< percent_t, percent_t >.
Definition at line 525 of file electronic_throttle.cpp.

◆ getClosedLoopAutotune()
| expected< percent_t > EtbController::getClosedLoopAutotune | ( | percent_t | setpoint, |
| percent_t | actualThrottlePosition | ||
| ) |
Definition at line 430 of file electronic_throttle.cpp.
Referenced by getClosedLoop().


◆ getCurrentTarget()
|
inlineoverridevirtual |
Implements IEtbController.
Definition at line 72 of file electronic_throttle_impl.h.
◆ getFunction()
|
inline |
Definition at line 57 of file electronic_throttle_impl.h.
◆ getLuaAdjustment()
| float EtbController::getLuaAdjustment | ( | ) | const |
positive adjustment opens TPS, negative closes TPS
Definition at line 392 of file electronic_throttle.cpp.
Referenced by getSetpointEtb(), and getSetpointWastegate().

◆ getMotor()
|
inlineprotected |
Definition at line 90 of file electronic_throttle_impl.h.
◆ getOpenLoop()
Implements ClosedLoopController< percent_t, percent_t >.
Definition at line 406 of file electronic_throttle.cpp.
◆ getPidState()
|
inlineoverridevirtual |
◆ getSetpoint()
|
overridevirtual |
Implements ClosedLoopController< percent_t, percent_t >.
Definition at line 262 of file electronic_throttle.cpp.
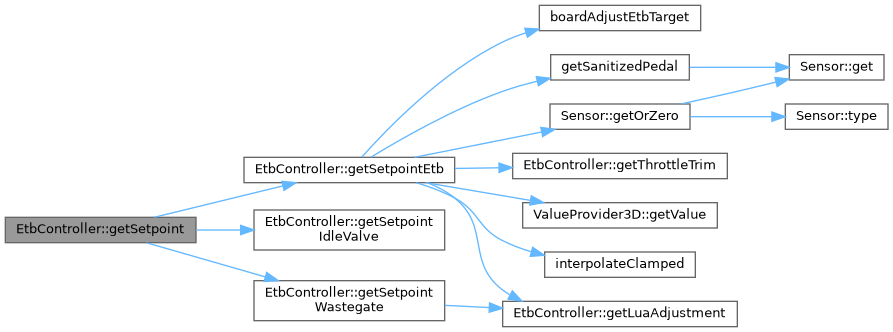
◆ getSetpointEtb()
| expected< percent_t > EtbController::getSetpointEtb | ( | ) |
Definition at line 303 of file electronic_throttle.cpp.
Referenced by getSetpoint().

◆ getSetpointIdleValve()
| expected< percent_t > EtbController::getSetpointIdleValve | ( | ) | const |
Definition at line 276 of file electronic_throttle.cpp.
Referenced by getSetpoint().

◆ getSetpointWastegate()
| expected< percent_t > EtbController::getSetpointWastegate | ( | ) | const |
Definition at line 285 of file electronic_throttle.cpp.
Referenced by getSetpoint().


◆ getThrottleTrim()
Reimplemented in EtbController2.
Definition at line 67 of file electronic_throttle_impl.h.
Referenced by getSetpointEtb().

◆ init()
|
overridevirtual |
Implements IEtbController.
Definition at line 170 of file electronic_throttle.cpp.

◆ isEtbMode()
|
inlineoverridevirtual |
Implements IEtbController.
Definition at line 76 of file electronic_throttle_impl.h.
Referenced by checkStatus(), init(), setOutput(), and update().
◆ observePlant()
|
overridevirtual |
Implements ClosedLoopController< percent_t, percent_t >.
Definition at line 248 of file electronic_throttle.cpp.

◆ onConfigurationChange()
| void EtbController::onConfigurationChange | ( | pid_s * | previousConfiguration | ) |
Definition at line 235 of file electronic_throttle.cpp.
Referenced by onConfigurationChangeElectronicThrottleCallback().


◆ reset()
|
overridevirtual |
Implements IEtbController.
Definition at line 223 of file electronic_throttle.cpp.
◆ setIdlePosition()
|
overridevirtual |
Implements IEtbController.
Definition at line 254 of file electronic_throttle.cpp.
◆ setLuaAdjustment()
|
overridevirtual |
Implements IEtbController.
Definition at line 384 of file electronic_throttle.cpp.
◆ setOutput()
|
overridevirtual |
Implements ClosedLoopController< percent_t, percent_t >.
Definition at line 551 of file electronic_throttle.cpp.
◆ setWastegatePosition()
|
overridevirtual |
Implements IEtbController.
Definition at line 258 of file electronic_throttle.cpp.
◆ showStatus()
| void EtbController::showStatus | ( | ) |
Definition at line 244 of file electronic_throttle.cpp.

◆ update()
|
overridevirtual |
Implements IEtbController.
Definition at line 665 of file electronic_throttle.cpp.
Field Documentation
◆ hadPpsError
|
protected |
Definition at line 88 of file electronic_throttle_impl.h.
Referenced by checkStatus().
◆ hadTpsError
|
protected |
Definition at line 87 of file electronic_throttle_impl.h.
Referenced by checkStatus().
◆ lastTickUs
|
private |
Definition at line 134 of file electronic_throttle_impl.h.
◆ m_a
|
private |
Definition at line 124 of file electronic_throttle_impl.h.
Referenced by getClosedLoopAutotune().
◆ m_autotuneCounter
|
private |
Definition at line 128 of file electronic_throttle_impl.h.
Referenced by getClosedLoopAutotune().
◆ m_autotuneCurrentParam
|
private |
Definition at line 129 of file electronic_throttle_impl.h.
Referenced by getClosedLoopAutotune().
◆ m_cycleTimer
|
private |
Definition at line 118 of file electronic_throttle_impl.h.
Referenced by getClosedLoop(), and getClosedLoopAutotune().
◆ m_function
|
private |
Definition at line 93 of file electronic_throttle_impl.h.
Referenced by checkStatus(), getFunction(), getOpenLoop(), getSetpoint(), init(), isEtbMode(), and setOutput().
◆ m_idlePosition
|
private |
Definition at line 111 of file electronic_throttle_impl.h.
Referenced by getSetpointEtb(), getSetpointIdleValve(), and setIdlePosition().
◆ m_isAutotune
|
private |
Definition at line 114 of file electronic_throttle_impl.h.
Referenced by checkStatus(), getClosedLoop(), and getSetpointEtb().
◆ m_jamDetectTimer
|
private |
Definition at line 106 of file electronic_throttle_impl.h.
Referenced by checkJam().
◆ m_lastIsPositive
|
private |
Definition at line 117 of file electronic_throttle_impl.h.
Referenced by getClosedLoopAutotune().
◆ m_luaAdjustmentTimer
|
private |
Definition at line 132 of file electronic_throttle_impl.h.
Referenced by getLuaAdjustment(), and setLuaAdjustment().
◆ m_maxCycleTps
|
private |
Definition at line 120 of file electronic_throttle_impl.h.
Referenced by getClosedLoopAutotune().
◆ m_minCycleTps
|
private |
Definition at line 119 of file electronic_throttle_impl.h.
Referenced by getClosedLoopAutotune().
◆ m_motor
|
private |
Definition at line 95 of file electronic_throttle_impl.h.
Referenced by getMotor(), init(), onConfigurationChange(), setOutput(), and update().
◆ m_pedalProvider
|
private |
Definition at line 109 of file electronic_throttle_impl.h.
Referenced by getSetpointEtb(), and init().
◆ m_pid
|
private |
Definition at line 96 of file electronic_throttle_impl.h.
Referenced by checkStatus(), getClosedLoop(), getPidState(), init(), onConfigurationChange(), and showStatus().
◆ m_positionSensor
|
private |
Definition at line 94 of file electronic_throttle_impl.h.
Referenced by checkStatus(), init(), and observePlant().
◆ m_shouldResetPid
|
private |
Definition at line 97 of file electronic_throttle_impl.h.
Referenced by getClosedLoop(), onConfigurationChange(), and reset().
◆ m_targetErrorAccumulator
|
private |
Definition at line 99 of file electronic_throttle_impl.h.
Referenced by getClosedLoop(), and init().
◆ m_tu
|
private |
Definition at line 125 of file electronic_throttle_impl.h.
Referenced by getClosedLoopAutotune().
◆ prevOutput
| float EtbController::prevOutput = 0 |
Definition at line 84 of file electronic_throttle_impl.h.
The documentation for this class was generated from the following files:
- controllers/actuators/electronic_throttle_impl.h
- controllers/actuators/electronic_throttle.cpp