Detailed Description
Data Structures | |
| struct | BackupSramData |
Enumerations | |
| enum class | backup_ram_e { StepperPosition , IgnCounter , BACKUP_RAM_NUM } |
Functions | |
| uint32_t | backupRamLoad (backup_ram_e idx) |
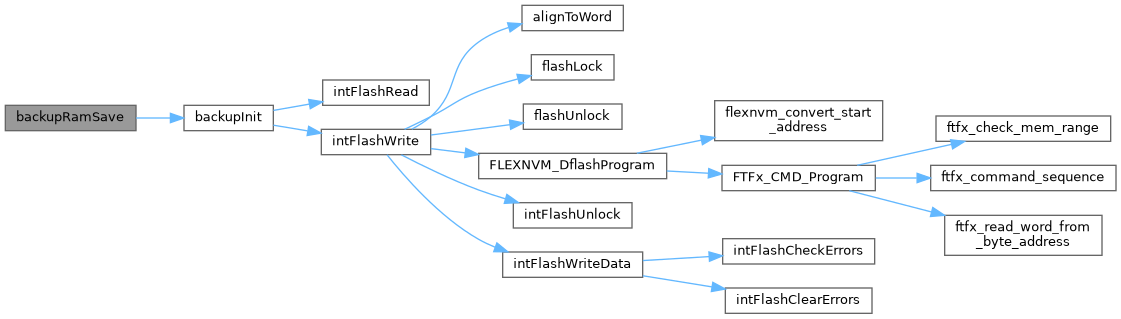
| void | backupRamSave (backup_ram_e idx, uint32_t value) |
| void | backupRamFlush (void) |
| BackupSramData * | getBackupSram () |
Enumeration Type Documentation
◆ backup_ram_e
|
strong |
| Enumerator | |
|---|---|
| StepperPosition | IAC Stepper motor position, 16-bit (stored in BKP0R 0..15) Used in stepper.cpp |
| IgnCounter | Ignition switch counter, 8-bit (stored in BKP0R 16..23) The counter stores the number of times the ignition switch is turned on. Used for prime injection pulse. We need a protection against 'fake' ignition switch on and off (i.e. no engine started), to avoid repeated prime pulses. So we check and update the ignition switch counter in non-volatile backup-RAM. See startPrimeInjectionPulse() in controllers/trigger/main_trigger_callback.cpp |
| BACKUP_RAM_NUM | |
Definition at line 14 of file backup_ram.h.
Function Documentation
◆ backupRamFlush()
| void backupRamFlush | ( | void | ) |
Definition at line 61 of file backup_ram.cpp.

◆ backupRamLoad()
| uint32_t backupRamLoad | ( | backup_ram_e | idx | ) |
Definition at line 43 of file backup_ram.cpp.
Referenced by PrimeController::getKeyCycleCounter(), and StepperMotorBase::loadStepperPos().


◆ backupRamSave()
| void backupRamSave | ( | backup_ram_e | idx, |
| uint32_t | value | ||
| ) |
Definition at line 52 of file backup_ram.cpp.
Referenced by PrimeController::onSlowCallback(), StepperMotorBase::saveStepperPos(), and PrimeController::setKeyCycleCounter().

◆ getBackupSram()
| BackupSramData * getBackupSram | ( | ) |
Definition at line 52 of file backup_ram.cpp.
Referenced by chDbgPanic3(), errorHandlerInit(), firmwareErrorV(), and logHardFault().
