Functions | |
| Gpio | getCommsLedPin () |
| Gpio | getWarningLedPin () |
| Gpio | getRunningLedPin () |
| static void | setInjectorPins () |
| static void | setIgnitionPins () |
| static void | setupEtb () |
| static void | m74_9_boardDefaultConfiguration () |
| Board-specific configuration defaults. | |
| static void | m74_9_boardConfigOverrides () |
| static void | board_init_ext_gpios () |
| void | boardInit () |
| Board-specific initialization code. | |
| int | getBoardMetaOutputsCount () |
| int | getBoardMetaDcOutputsCount () |
| void | setup_custom_board_overrides () |
Variables | |
| static struct l9779_config | l9779_cfg |
| static Gpio | OUTPUTS [] |
Function Documentation
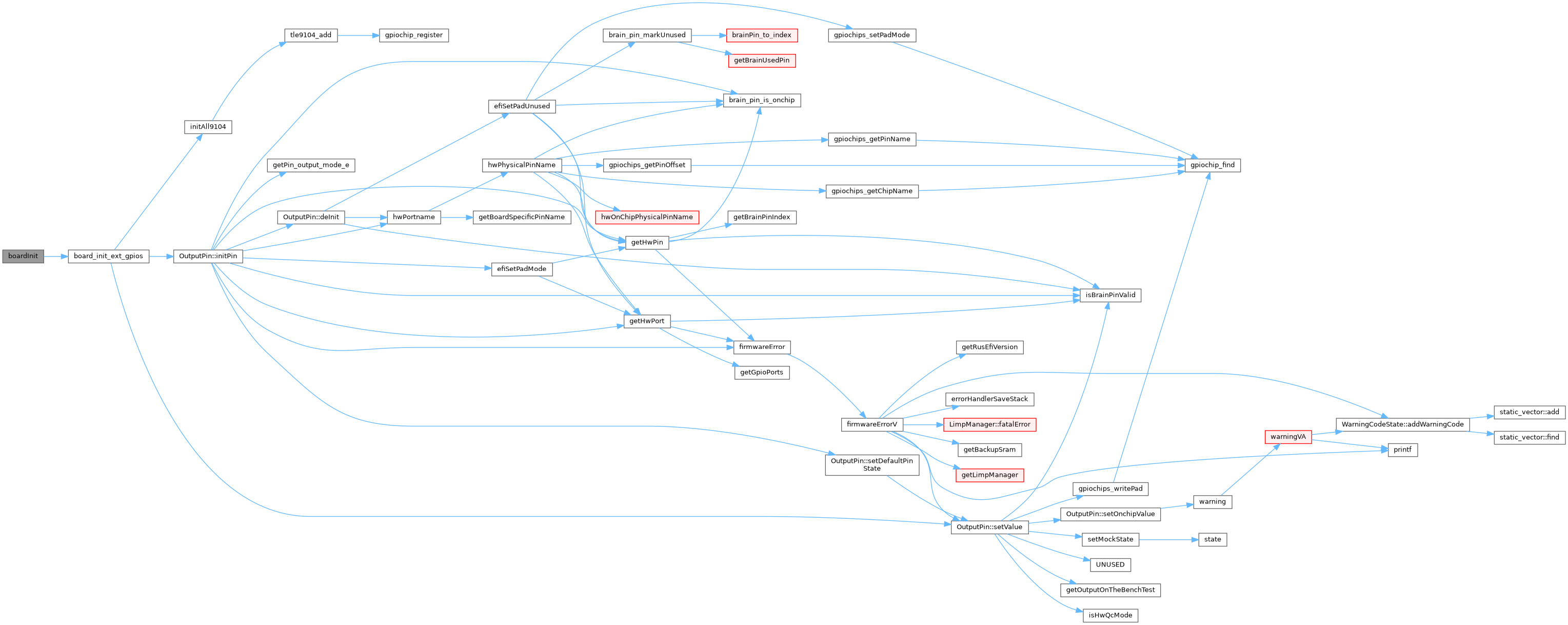
◆ board_init_ext_gpios()
|
static |
Definition at line 152 of file board_configuration.cpp.

◆ boardInit()
| void boardInit | ( | void | ) |
Board-specific initialization code.
Definition at line 165 of file board_configuration.cpp.
◆ getBoardMetaDcOutputsCount()
| int getBoardMetaDcOutputsCount | ( | ) |
Definition at line 190 of file board_configuration.cpp.
◆ getBoardMetaOutputsCount()
| int getBoardMetaOutputsCount | ( | ) |
Definition at line 186 of file board_configuration.cpp.
◆ getCommsLedPin()
| Gpio getCommsLedPin | ( | ) |
Definition at line 8 of file board_configuration.cpp.
◆ getRunningLedPin()
| Gpio getRunningLedPin | ( | ) |
Definition at line 18 of file board_configuration.cpp.
◆ getWarningLedPin()
| Gpio getWarningLedPin | ( | ) |
Definition at line 13 of file board_configuration.cpp.
◆ m74_9_boardConfigOverrides()
|
static |
Definition at line 102 of file board_configuration.cpp.
Referenced by setup_custom_board_overrides().


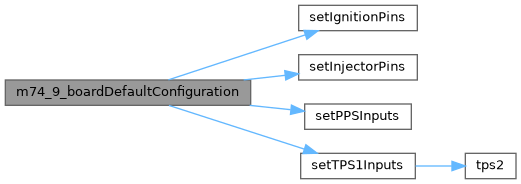
◆ m74_9_boardDefaultConfiguration()
|
static |
Board-specific configuration defaults.
Definition at line 64 of file board_configuration.cpp.
Referenced by setup_custom_board_overrides().

◆ setIgnitionPins()
|
static |
Definition at line 32 of file board_configuration.cpp.
◆ setInjectorPins()
|
static |
Definition at line 23 of file board_configuration.cpp.
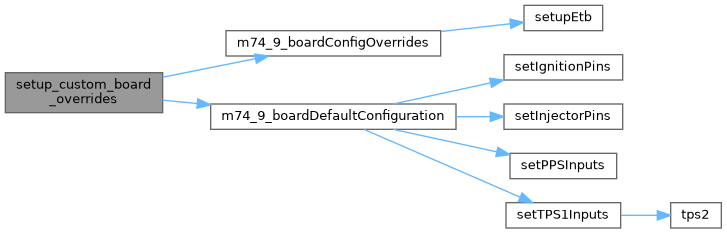
◆ setup_custom_board_overrides()
| void setup_custom_board_overrides | ( | ) |
Definition at line 193 of file board_configuration.cpp.
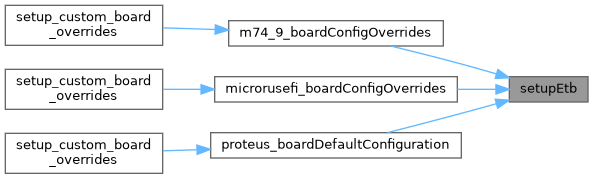
◆ setupEtb()
|
static |
Definition at line 42 of file board_configuration.cpp.
Referenced by m74_9_boardConfigOverrides(), microrusefi_boardConfigOverrides(), and proteus_boardDefaultConfiguration().
Variable Documentation
◆ l9779_cfg
|
static |
Definition at line 109 of file board_configuration.cpp.
Referenced by board_init_ext_gpios().
◆ OUTPUTS
|
static |
Definition at line 169 of file board_configuration.cpp.