Detailed Description
- Date
- Jul 27, 2014
Definition in file mpu_util.cpp.
Variables | |
| bool | isSpiInitialized [SPI_TOTAL_COUNT+1] = { true, false, false, false, false, false, false } |
Function Documentation
◆ _unhandled_exception()
| void _unhandled_exception | ( | void | ) |
Definition at line 29 of file mpu_util.cpp.

◆ baseMCUInit()
| void baseMCUInit | ( | ) |
Definition at line 26 of file mpu_util.cpp.
◆ BOR_Get()
| BOR_Level_t BOR_Get | ( | void | ) |
Definition at line 176 of file mpu_util.cpp.
◆ BOR_Set()
| BOR_Result_t BOR_Set | ( | BOR_Level_t | BORValue | ) |
Definition at line 180 of file mpu_util.cpp.
◆ BusFaultVector()
| void BusFaultVector | ( | void | ) |

◆ canHwInfo()
| void canHwInfo | ( | CANDriver * | cand | ) |
Definition at line 218 of file mpu_util.cpp.
◆ DebugMonitorVector()
| void DebugMonitorVector | ( | void | ) |

◆ detectCanDevice()
| CANDriver * detectCanDevice | ( | brain_pin_e | pinRx, |
| brain_pin_e | pinTx | ||
| ) |
Definition at line 210 of file mpu_util.cpp.
◆ enableFastAdcChannel()
| AdcToken enableFastAdcChannel | ( | const char * | msg, |
| adc_channel_e | channel | ||
| ) |
Definition at line 285 of file mpu_util.cpp.

◆ flashSectorSize()
| size_t flashSectorSize | ( | flashsector_t | sector | ) |
Get the size of sector.
- Returns
sectorsize in bytes.
Definition at line 230 of file mpu_util.cpp.
◆ getFastAdc()
| adcsample_t getFastAdc | ( | AdcToken | token | ) |
Definition at line 294 of file mpu_util.cpp.
◆ getFlashAddrFirstCopy()
| uintptr_t getFlashAddrFirstCopy | ( | void | ) |
Flex Non Volatile Memory is faster than flash It also has smaller pages so it takes less time to erase
There is no remote access to FlexNVM meaning that we cannot erase settings externally
Definition at line 249 of file mpu_util.cpp.
◆ getFlashAddrSecondCopy()
| uintptr_t getFlashAddrSecondCopy | ( | void | ) |
Definition at line 253 of file mpu_util.cpp.
◆ getMCUResetCause() [1/2]
| Reset_Cause_t getMCUResetCause | ( | ) |
Definition at line 303 of file mpu_util.cpp.
◆ getMCUResetCause() [2/2]
| const char * getMCUResetCause | ( | Reset_Cause_t | cause | ) |
Definition at line 307 of file mpu_util.cpp.
◆ getMcuTemperature()
| float getMcuTemperature | ( | ) |
Definition at line 270 of file mpu_util.cpp.
◆ getMcuVrefVoltage()
| float getMcuVrefVoltage | ( | ) |
Definition at line 275 of file mpu_util.cpp.
◆ getSpiAf()
|
static |
Definition at line 64 of file mpu_util.cpp.
◆ HardFaultVector()
| void HardFaultVector | ( | void | ) |
Definition at line 55 of file mpu_util.cpp.
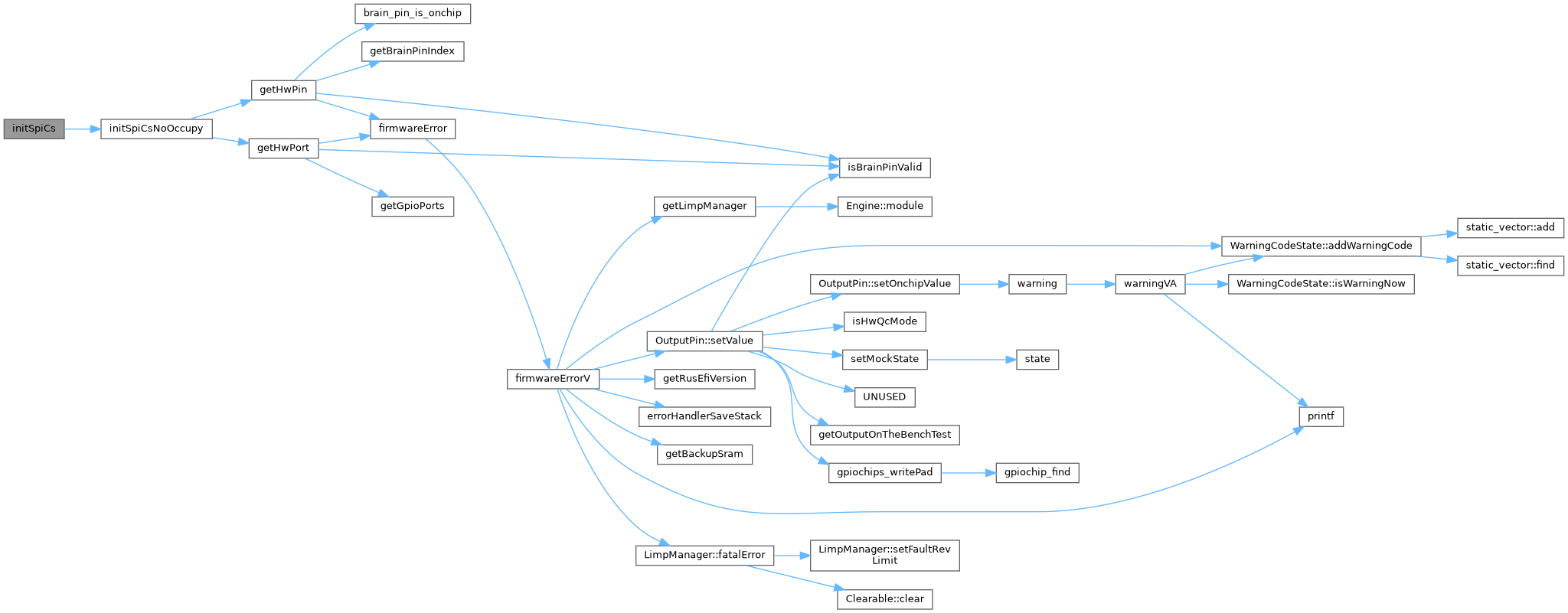
◆ initSpiCs()
| void initSpiCs | ( | SPIConfig * | spiConfig, |
| brain_pin_e | csPin | ||
| ) |
Definition at line 148 of file mpu_util.cpp.
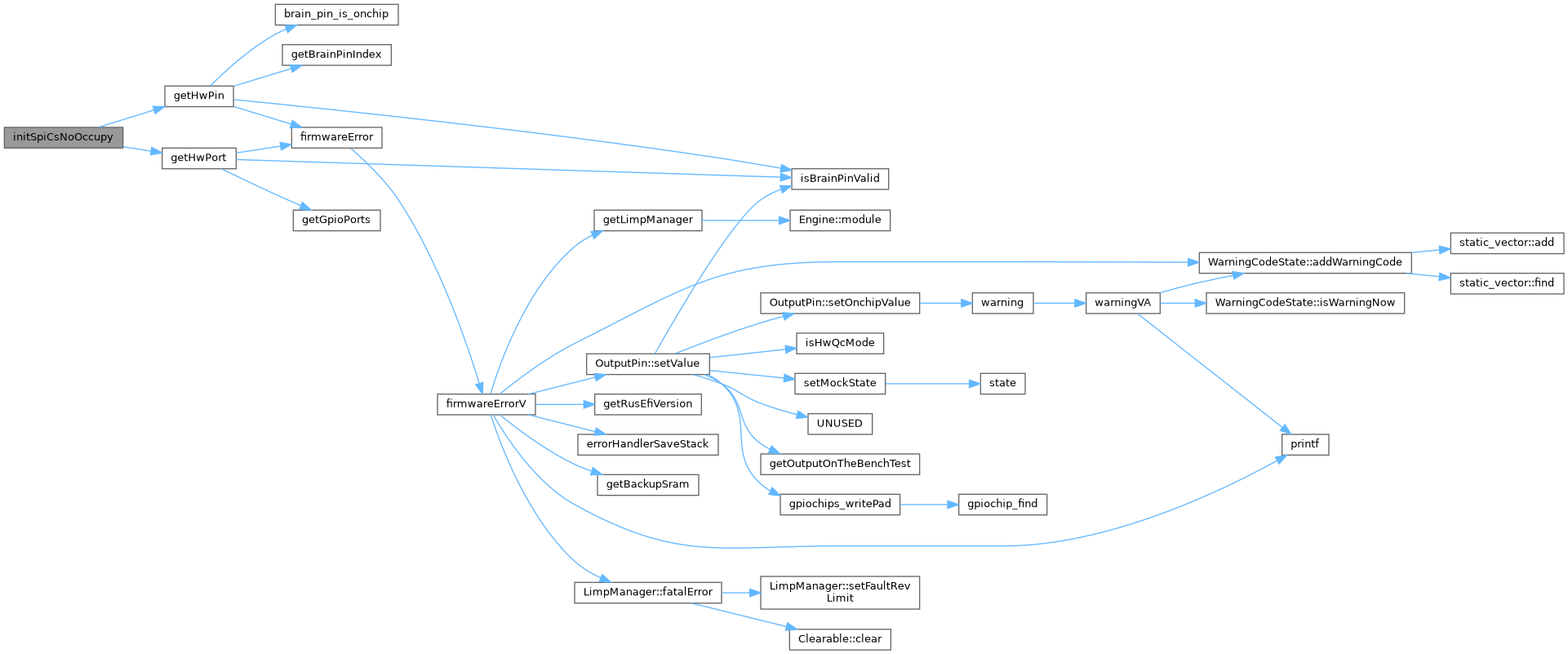
◆ initSpiCsNoOccupy()
| void initSpiCsNoOccupy | ( | SPIConfig * | spiConfig, |
| brain_pin_e | csPin | ||
| ) |
Definition at line 141 of file mpu_util.cpp.
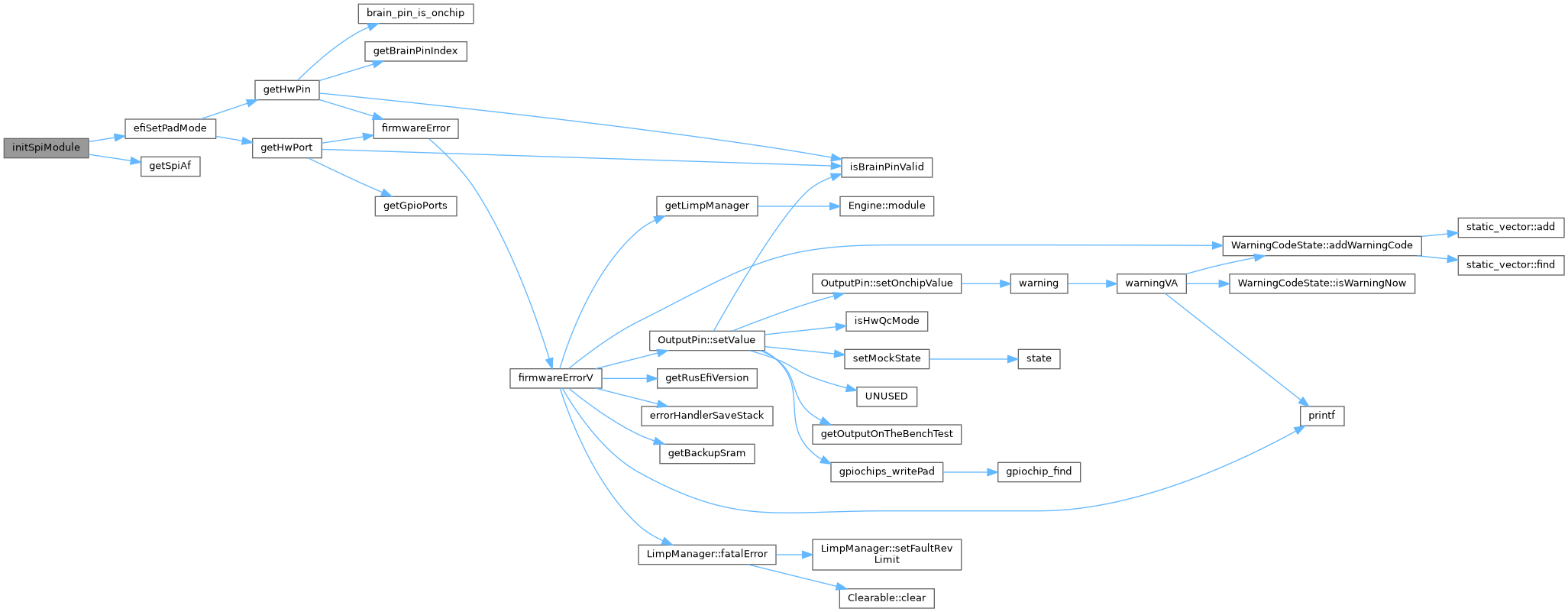
◆ initSpiModule()
| void initSpiModule | ( | SPIDriver * | driver, |
| brain_pin_e | sck, | ||
| brain_pin_e | miso, | ||
| brain_pin_e | mosi, | ||
| int | sckMode, | ||
| int | mosiMode, | ||
| int | misoMode | ||
| ) |
See https://github.com/rusefi/rusefi/pull/664/
Info on the silicon defect can be found in this document, section 2.5.2: https://www.st.com/content/ccc/resource/technical/document/errata_sheet/0a/98/58/84/86/b6/47/a2/DM00037591.pdf/files/DM00037591.pdf/jcr:content/translations/en.DM00037591.pdf
Definition at line 123 of file mpu_util.cpp.
◆ isValidCan1RxPin()
|
static |
◆ isValidCan1TxPin()
|
static |
◆ isValidCan2RxPin()
|
static |
◆ isValidCan2TxPin()
|
static |
◆ isValidCanRxPin()
| bool isValidCanRxPin | ( | brain_pin_e | pin | ) |
◆ isValidCanTxPin()
| bool isValidCanTxPin | ( | brain_pin_e | pin | ) |
◆ mcuCanFlashWhileRunning()
| bool mcuCanFlashWhileRunning | ( | ) |
Definition at line 226 of file mpu_util.cpp.
◆ portInitAdc()
| void portInitAdc | ( | ) |
Definition at line 262 of file mpu_util.cpp.
◆ readSlowAnalogInputs()
| bool readSlowAnalogInputs | ( | adcsample_t * | convertedSamples | ) |
Definition at line 280 of file mpu_util.cpp.
◆ setWatchdogResetPeriod()
| void setWatchdogResetPeriod | ( | int | resetMs | ) |
Definition at line 23 of file mpu_util.cpp.
◆ spiCalcClockDiv()
| int spiCalcClockDiv | ( | SPIDriver * | spip, |
| SPIConfig * | spiConfig, | ||
| unsigned int | clk | ||
| ) |
Definition at line 168 of file mpu_util.cpp.
◆ spiGetBaseClock()
| int spiGetBaseClock | ( | SPIDriver * | spip | ) |
Definition at line 162 of file mpu_util.cpp.
◆ startWatchdog()
| void startWatchdog | ( | int | timeoutMs | ) |
Definition at line 17 of file mpu_util.cpp.
◆ tryResetWatchdog()
| void tryResetWatchdog | ( | ) |
Definition at line 20 of file mpu_util.cpp.
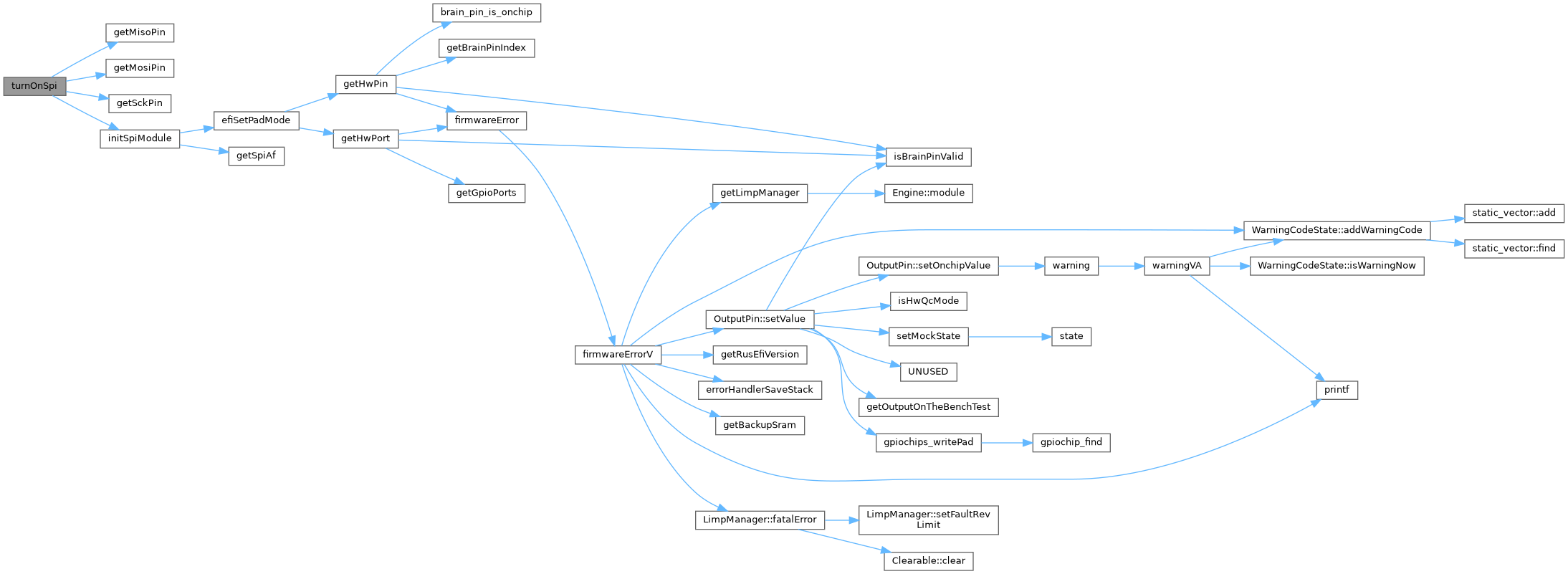
◆ turnOnSpi()
| void turnOnSpi | ( | spi_device_e | device | ) |
Definition at line 83 of file mpu_util.cpp.
◆ UsageFaultVector()
| void UsageFaultVector | ( | void | ) |

Variable Documentation
◆ isSpiInitialized
| bool isSpiInitialized[SPI_TOTAL_COUNT+1] = { true, false, false, false, false, false, false } |
Definition at line 62 of file mpu_util.cpp.