Functions | |
| void | setGenesisCoupeBK1 () |
| void | setGenesisCoupeBK2 () |
| void | setHyundaiPb () |
| void | cannedPbTables () |
Function Documentation
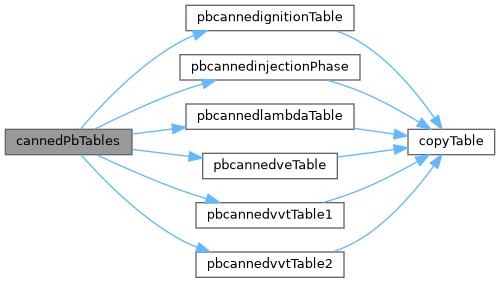
◆ cannedPbTables()
| void cannedPbTables | ( | ) |
Definition at line 3 of file hyundai_pb_canned.cpp.
3 {
4#if (IGN_LOAD_COUNT == 16) && (IGN_RPM_COUNT == 16) && (FUEL_LOAD_COUNT == 16) && (FUEL_RPM_COUNT == 16)
5 pbcannedvvtTable1();
6 pbcannedvvtTable2();
8 pbcannedveTable();
10 pbcannedlambdaTable();
11#endif
12}
static void pbcannedinjectionPhase()
Definition hyundai_pb_canned_tables.cpp:81
Referenced by setHyundaiPb().
Here is the call graph for this function:
Here is the caller graph for this function:

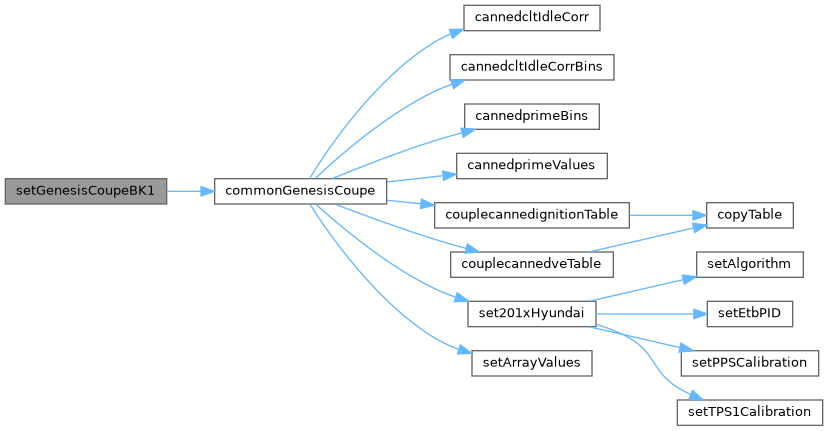
◆ setGenesisCoupeBK1()
| void setGenesisCoupeBK1 | ( | ) |
Definition at line 431 of file hyundai.cpp.
431 {
432 commonGenesisCoupe();
433 // 2010-2012 315cc at 43.5psi
434 // fuel system is fixed pressure 55psi
435 engineConfiguration->injector.flow = 354.19; // https://www.google.com/search?q=315*sqrt%2855%2F43.5%29
437
438}
static constexpr engine_configuration_s * engineConfiguration
Definition engine_configuration.h:80
injector_s injector
float fuelReferencePressure
Referenced by applyEngineType().
Here is the call graph for this function:
Here is the caller graph for this function:

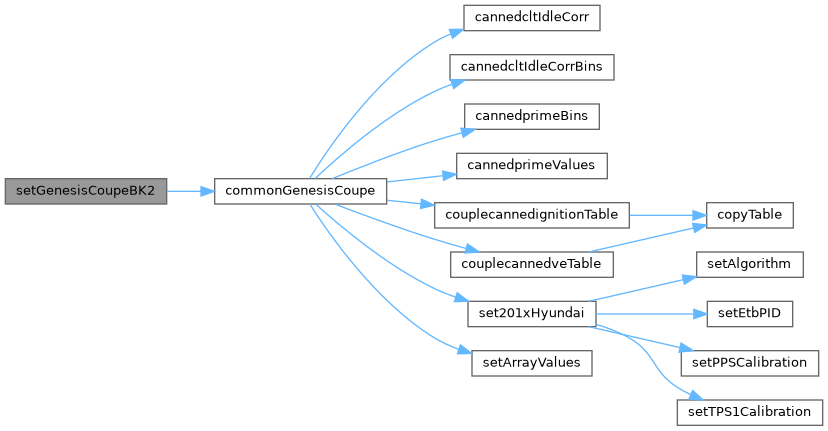
◆ setGenesisCoupeBK2()
| void setGenesisCoupeBK2 | ( | ) |
Definition at line 440 of file hyundai.cpp.
440 {
441 commonGenesisCoupe();
442 // 2013+ 450cc at 43.5
443 // fuel system is fixed pressure 85psi
444 // flow rate P2 = flow rate P1 * sqrt(P2/P1)
445 engineConfiguration->injector.flow = 629.03; // https://www.google.com/search?q=450*sqrt%2885%2F43.5%29
447 // default "Throttle 2"
449
450}
dc_function_e etbFunctions[ETB_COUNT]
Referenced by applyEngineType().
Here is the call graph for this function:
Here is the caller graph for this function:

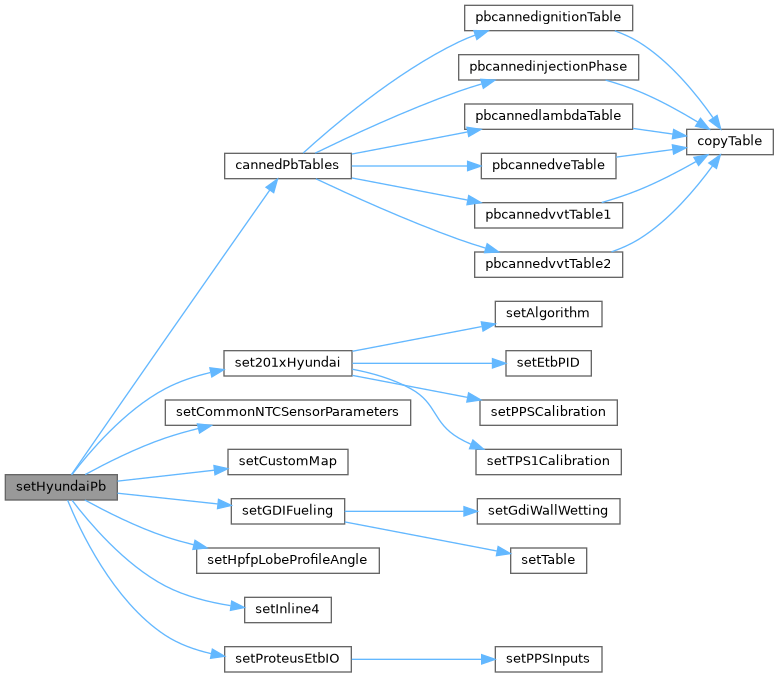
◆ setHyundaiPb()
| void setHyundaiPb | ( | ) |
Definition at line 39 of file hyundai.cpp.
39 {
40 setGDIFueling();
41 // override injection phase
42 cannedPbTables();
43 setInline4();
47
52
55
62
63 // ETB buzzing is annoying :(
65
68
69 set201xHyundai();
70 // Injectors flow 1214 cc/min at 100 bar pressure
72
73 setCustomMap(/*lowValue*/ 20, /*mapLowValueVoltage*/ 0.79, /*highValue*/ 101.3, /*mapHighValueVoltage*/ 4);
74
77
80
84
88 // page 98, Fuel System > Engine Control System > Rail Pressure Sensor (RPS) > Specifications
90
91#ifdef HW_HELLEN_4K_GDI
93
94#endif
95
96#ifdef HW_HELLEN_4CHAN
100
103 config->boardUse2stepPullDown = true; // looks like 1K extra pull-down is needed on the harness?! :(
106#endif // HW_HELLEN_4CHAN
107
108#if defined(HW_HELLEN_4CHAN) || EFI_UNIT_TEST
110#endif // HW_HELLEN_4CHAN
111
112#if HW_PROTEUS && EFI_PROD_CODE
116
117// engineConfiguration->acRelayPin = Gpio::PROTEUS_LS_6;
119
125
126
130
131 setProteusEtbIO();
132
133// something something input levels are not happy for digital input pin?
136#endif // HW_PROTEUS
138
139#if HW_PROTEUS || HW_HELLEN_4CHAN
140 strncpy(config->luaScript, GET_BIT_RANGE_LSB TWO_BYTES_LSB PRINT_ARRAY SET_TWO_BYTES_LSB HYUNDAI_SUM_NIBBLES R"(
141
142GDI4_BASE_ADDRESS = 0xBB20
143GDI_CHANGE_ADDRESS = GDI4_BASE_ADDRESS + 0x10
144
145GDI4_CAN_SET_TAG = 0x78
146local data_set_settings = { GDI4_CAN_SET_TAG, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00 }
147
148FIXED_POINT = 128
149
150setTickRate(100)
151
152function onCanConfiguration3(bus, id, dlc, data)
153 -- print("Received configuration3 "..arrayToString(data))
154 pumpPeak = getTwoBytesLSB(data, 6, 1 / 128)
155 print("GDI4 says PumpPeakCurrent ".. pumpPeak)
156 setLuaGauge(1, pumpPeak)
157end
158
159function onCanVersion(bus, id, dlc, data)
160 year = data[1] * 100 + data[2]
161 month = data[3]
162 day = data[4]
163-- print ("GDI4 firmware " ..year ..'/' ..month ..'/' ..day)
164end
165
166canRxAdd(GDI4_BASE_ADDRESS + 3, onCanConfiguration3)
167canRxAdd(GDI4_BASE_ADDRESS + 5, onCanVersion)
168
169
170EMS_DCT11_128 = 0x80
171EMS_DCT12_129 = 0x81
172EMS_H12_399 = 0x18f
173EMS6_608 = 0x260
174EMS5_672 = 0x2a0
175EMS11_790 = 0x316
176EMS12_809 = 0x329
177EMS9_898 = 0x382
178EMS14_1349 = 0x545
179
180counter = 0
181
182payLoad128 = { 0x00, 0x17, 0x70, 0x0F, 0x1B, 0x2C, 0x1B, 0x75 }
183payLoad129 = { 0x40, 0x84, 0x5F, 0x00, 0x00, 0x00, 0x00, 0x75 }
184payLoad399 = { 0x00, 0x30, 0x1d, 0x00, 0x00, 0x63, 0x00, 0x00 }
185payLoad608 = { 0x05, 0x1d, 0x00, 0x30, 0x01, 0xa5, 0x7f, 0x31 }
186payLoad672 = { 0xe0, 0x00, 0x5f, 0x98, 0x39, 0x12, 0x9e, 0x08 }
187payLoad809 = { 0xd7, 0x7b, 0x7e, 0x0c, 0x11, 0x2c, 0x00, 0x10 }
188payLoad898 = { 0x40, 0xfe, 0x0f, 0x00, 0x00, 0x00, 0x00, 0x08 }
189payLoad1349 = { 0xCA, 0x16, 0x00, 0x8A, 0x75, 0xFF, 0x75, 0xFF }
190
191speedSensor = Sensor.new("VehicleSpeed")
192speedSensor : setTimeout(3000)
193
194function onCluPacket(bus, id, dlc, data)
195 speedKph = getBitRange(data, 8, 9) * 0.5
196-- print('onCAR_SPEED ' ..speedKph)
197 speedSensor : set(speedKph)
198end
199
200canRxAdd(1, 1264, onCluPacket)
201
202function onTick()
203 local RPMread = math.floor(getSensor("RPM") * 4)
204 local RPMhi = RPMread >> 8
205 local RPMlo = RPMread & 0xff
206
207 payLoad128[3] = RPMlo
208 payLoad128[4] = RPMhi
209
210 counter = (counter + 1) % 16
211
212 check128 = hyundaiSumNibbles(payLoad128, counter)
213 payLoad128[8] = check128 * 16 + counter
214 txCan(1, EMS_DCT11_128, 0, payLoad128)
215
216 check129 = hyundaiSumNibbles(payLoad129, counter)
217 payLoad129[8] = check129 * 16 + counter
218 txCan(1, EMS_DCT12_129, 0, payLoad129)
219
220 canRPMpayload = { 0x05, 0x1B, RPMlo, RPMhi, 0x1B, 0x2C, 0x00, 0x7F }
221
222 txCan(1, EMS11_790, 0, canRPMpayload)
223 txCan(1, EMS14_1349, 0, payLoad1349)
224
225 txCan(1, EMS_H12_399, 0, payLoad399)
226 txCan(1, EMS6_608, 0, payLoad608)
227 txCan(1, EMS5_672, 0, payLoad672)
228 txCan(1, EMS12_809, 0, payLoad809)
229 txCan(1, EMS9_898, 0, payLoad898)
230
231 pumpPeakCurrent = getCalibration("mc33_hpfp_i_peak")
232 pumpHoldCurrent = getCalibration("mc33_hpfp_i_hold")
233
234 TholdOff = getCalibration("mc33_t_hold_off")
235 THoldDuration = getCalibration("mc33_t_hold_tot")
236
237
238 setTwoBytesLsb(data_set_settings, 1, TholdOff)
239 setTwoBytesLsb(data_set_settings, 3, THoldDuration)
240 setTwoBytesLsb(data_set_settings, 5, pumpPeakCurrent * FIXED_POINT)
241-- print('Will be sending ' ..arrayToString(data_set_settings))
242 txCan(1, GDI_CHANGE_ADDRESS + 3, 1, data_set_settings)
243
244 setTwoBytesLsb(data_set_settings, 1, pumpHoldCurrent * FIXED_POINT)
245 setTwoBytesLsb(data_set_settings, 3, GDI4_BASE_ADDRESS)
246-- print('Will be sending ' ..arrayToString(data_set_settings))
247 txCan(1, GDI_CHANGE_ADDRESS + 4, 1, data_set_settings)
248end
249
251#endif // HW_PROTEUS
252
253}
@ TLE9104_2_OUT_2
void setCustomMap(float lowValue, float mapLowValueVoltage, float highValue, float mapHighValueVoltage)
Definition default_base_engine.cpp:455
@ TT_TOOTHED_WHEEL_60_2
air_pressure_sensor_config_s sensor
adc_channel_e hwChannel
adc_channel_e hwChannel
vehicle_info_t engineMake
output_pin_e hpfpValvePin
bool enableSoftwareKnock
angle_t globalTriggerAngleOffset
scaled_channel< uint16_t, 100, 1 > gearRatio[TCU_GEAR_COUNT]
MAP_sensor_config_s map
afr_sensor_s afr
trigger_config_s trigger
ThermistorConf iat
float displacement
linear_sensor_s highPressureFuel
ThermistorConf clt
output_pin_e vvtPins[CAM_INPUTS_COUNT]
scaled_channel< uint8_t, 10, 1 > mc33_hpfp_i_hold
bool disableEtbWhenEngineStopped
output_pin_e fanPin
vvt_mode_e vvtMode[CAMS_PER_BANK]
bool rethrowHardFault
switch_input_pin_e acSwitch
uint8_t totalGearsCount
pin_input_mode_e startStopButtonMode
output_pin_e starterControlPin
float etbIdleThrottleRange
output_pin_e tachOutputPin
float vvtOffsets[CAM_INPUTS_COUNT]
brain_input_pin_e triggerInputPins[TRIGGER_INPUT_PIN_COUNT]
bool enableAemXSeries
vehicle_info_t engineCode
uint8_t hpfpCamLobes
switch_input_pin_e startStopButtonPin
brain_input_pin_e camInputs[CAM_INPUTS_COUNT]
scaled_channel< uint8_t, 10, 1 > mc33_hpfp_i_peak
float value1
float value2
adc_channel_e hwChannel
lua_script_t luaScript
bool boardUse2stepPullDown
trigger_type_e type
void setCommonNTCSensorParameters(ThermistorConf *thermistorConf)
Definition thermistors.cpp:33
Referenced by applyEngineType().
Here is the call graph for this function:
Here is the caller graph for this function:
