Data Structures | |
| struct | UARTConfig |
| Driver configuration structure. More... | |
| struct | UARTDriver |
| Structure representing an UART driver. More... | |
Typedefs | |
| typedef uint32_t | uartflags_t |
| UART driver condition flags type. | |
| typedef struct UARTDriver | UARTDriver |
| Structure representing an UART driver. | |
| typedef void(* | uartcb_t) (UARTDriver *uartp) |
| Generic UART notification callback type. | |
| typedef void(* | uartccb_t) (UARTDriver *uartp, uint16_t c) |
| Character received UART notification callback type. | |
| typedef void(* | uartecb_t) (UARTDriver *uartp, uartflags_t e) |
| Receive error UART notification callback type. | |
| typedef void(* | uarthcb_t) (UARTDriver *uartp, uartflags_t full) |
| Receive Half-transfer UART notification callback type. | |
Functions | |
| static void | uart_enter_rx_idle_loop (UARTDriver *uartp) |
| Puts the receiver in the UART_RX_IDLE state. | |
| void | uart_lld_callback (LPUART_Type *base, void *handle, status_t status, void *userData) |
| void | uart_lld_init (void) |
| Low level UART driver initialization. | |
| void | uart_lld_start (UARTDriver *uartp) |
| Configures and activates the UART peripheral. | |
| void | uart_lld_stop (UARTDriver *uartp) |
| Deactivates the UART peripheral. | |
| void | uart_lld_start_send (UARTDriver *uartp, size_t n, const void *txbuf) |
| Starts a transmission on the UART peripheral. | |
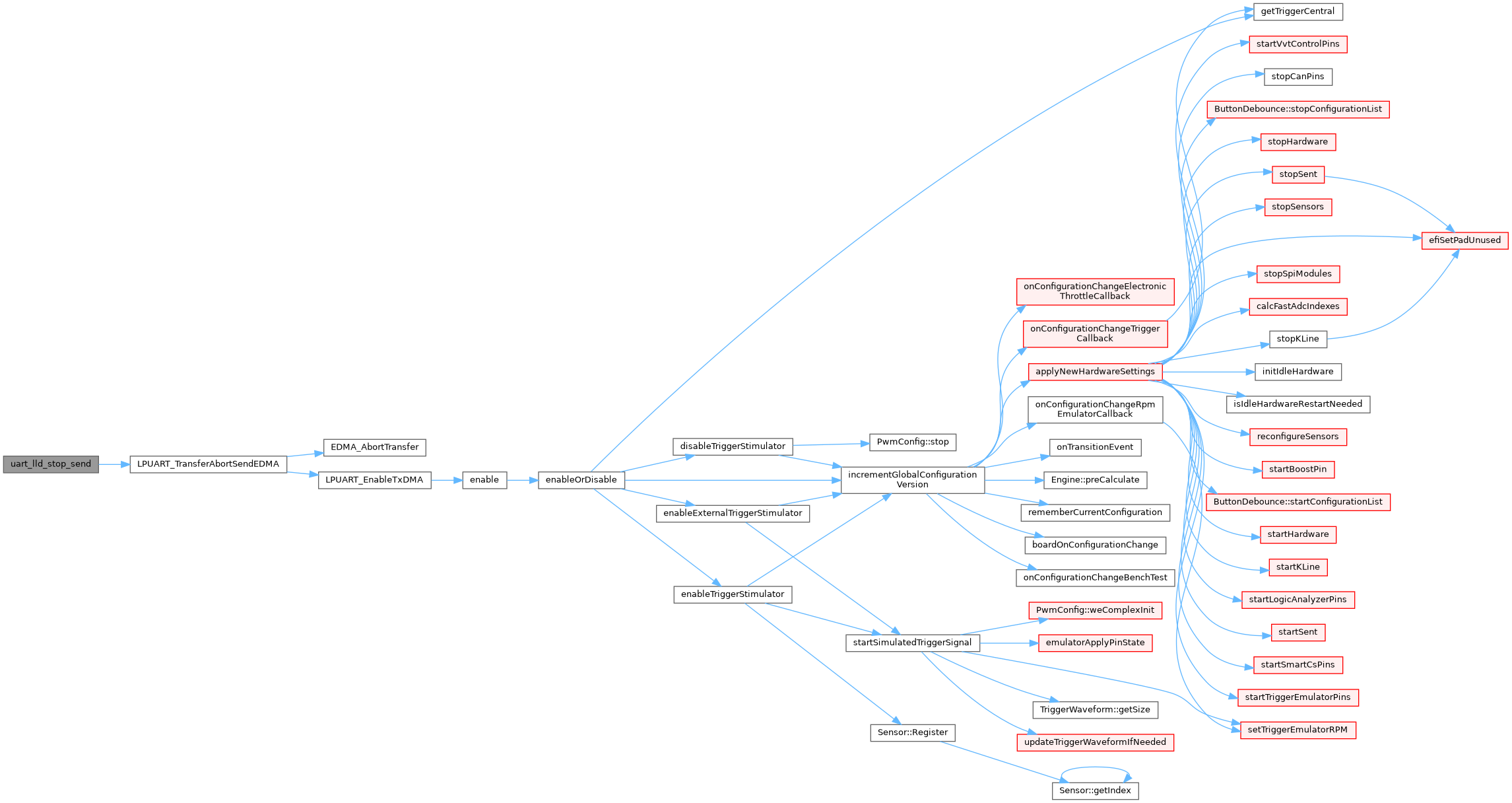
| size_t | uart_lld_stop_send (UARTDriver *uartp) |
| Stops any ongoing transmission. | |
| void | uart_lld_start_receive (UARTDriver *uartp, size_t n, void *rxbuf) |
| Starts a receive operation on the UART peripheral. | |
| size_t | uart_lld_stop_receive (UARTDriver *uartp) |
| Stops any ongoing receive operation. | |
| void | uart_lld_blocking_send (UARTDriver *uartp, size_t n, const void *txbuf) |
Variables | |
| UARTDriver | UARTD1 |
| UART1 driver identifier. | |
| UARTDriver | UARTD2 |
| UARTDriver | UARTD3 |
| UARTDriver | UARTD1 |
| UART1 driver identifier. | |
| UARTDriver | UARTD2 |
| UARTDriver | UARTD3 |
Detailed Description
Typedef Documentation
◆ uartcb_t
| typedef void(* uartcb_t) (UARTDriver *uartp) |
Generic UART notification callback type.
- Parameters
-
[in] uartp pointer to the UARTDriverobject
Definition at line 98 of file hal_uart_lld.h.
◆ uartccb_t
| typedef void(* uartccb_t) (UARTDriver *uartp, uint16_t c) |
Character received UART notification callback type.
- Parameters
-
[in] uartp pointer to the UARTDriverobject[in] c received character
Definition at line 106 of file hal_uart_lld.h.
◆ UARTDriver
| typedef struct UARTDriver UARTDriver |
Structure representing an UART driver.
Definition at line 91 of file hal_uart_lld.h.
◆ uartecb_t
| typedef void(* uartecb_t) (UARTDriver *uartp, uartflags_t e) |
Receive error UART notification callback type.
- Parameters
-
[in] uartp pointer to the UARTDriverobject[in] e receive error mask
Definition at line 114 of file hal_uart_lld.h.
◆ uartflags_t
| typedef uint32_t uartflags_t |
UART driver condition flags type.
Definition at line 86 of file hal_uart_lld.h.
◆ uarthcb_t
| typedef void(* uarthcb_t) (UARTDriver *uartp, uartflags_t full) |
Receive Half-transfer UART notification callback type.
- Parameters
-
[in] uartp pointer to the UARTDriverobject[in] full flag set to 1 for the second half, and 0 for the first half
Definition at line 122 of file hal_uart_lld.h.
Function Documentation
◆ uart_enter_rx_idle_loop()
|
static |
Puts the receiver in the UART_RX_IDLE state.
- Parameters
-
[in] uartp pointer to the UARTDriverobject
Definition at line 65 of file hal_uart_lld.c.
◆ uart_lld_blocking_send()
| void uart_lld_blocking_send | ( | UARTDriver * | uartp, |
| size_t | n, | ||
| const void * | txbuf | ||
| ) |
Definition at line 395 of file hal_uart_lld.c.

◆ uart_lld_callback()
| void uart_lld_callback | ( | LPUART_Type * | base, |
| void * | handle, | ||
| status_t | status, | ||
| void * | userData | ||
| ) |
Definition at line 72 of file hal_uart_lld.c.
Referenced by uart_lld_start().

◆ uart_lld_init()
| void uart_lld_init | ( | void | ) |
Low level UART driver initialization.
@notapi
Definition at line 123 of file hal_uart_lld.c.
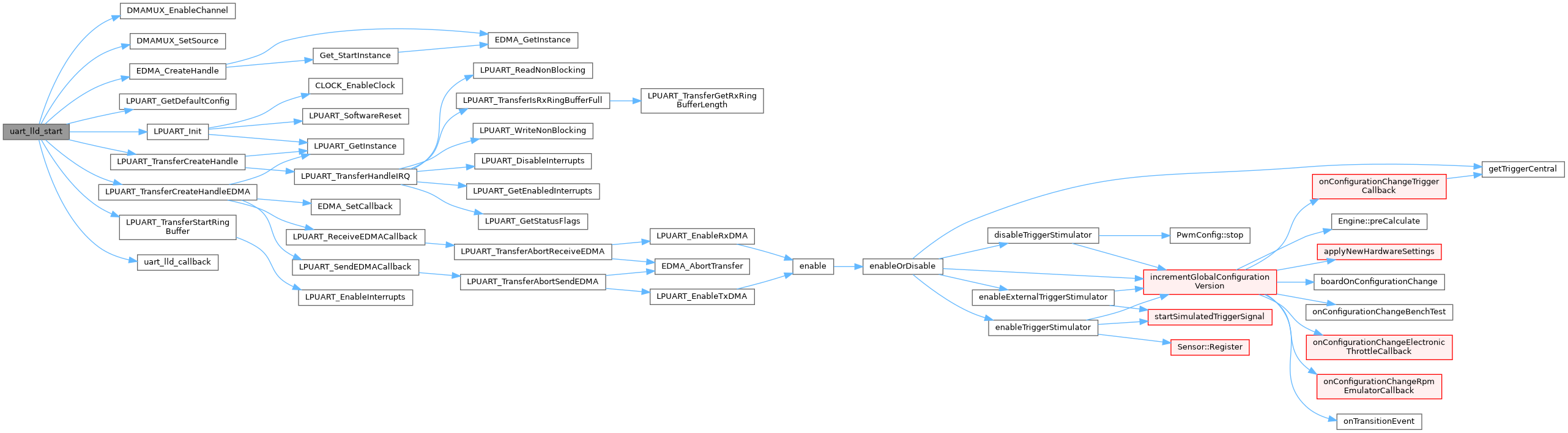
◆ uart_lld_start()
| void uart_lld_start | ( | UARTDriver * | uartp | ) |
Configures and activates the UART peripheral.
- Parameters
-
[in] uartp pointer to the UARTDriverobject
@notapi
Definition at line 148 of file hal_uart_lld.c.
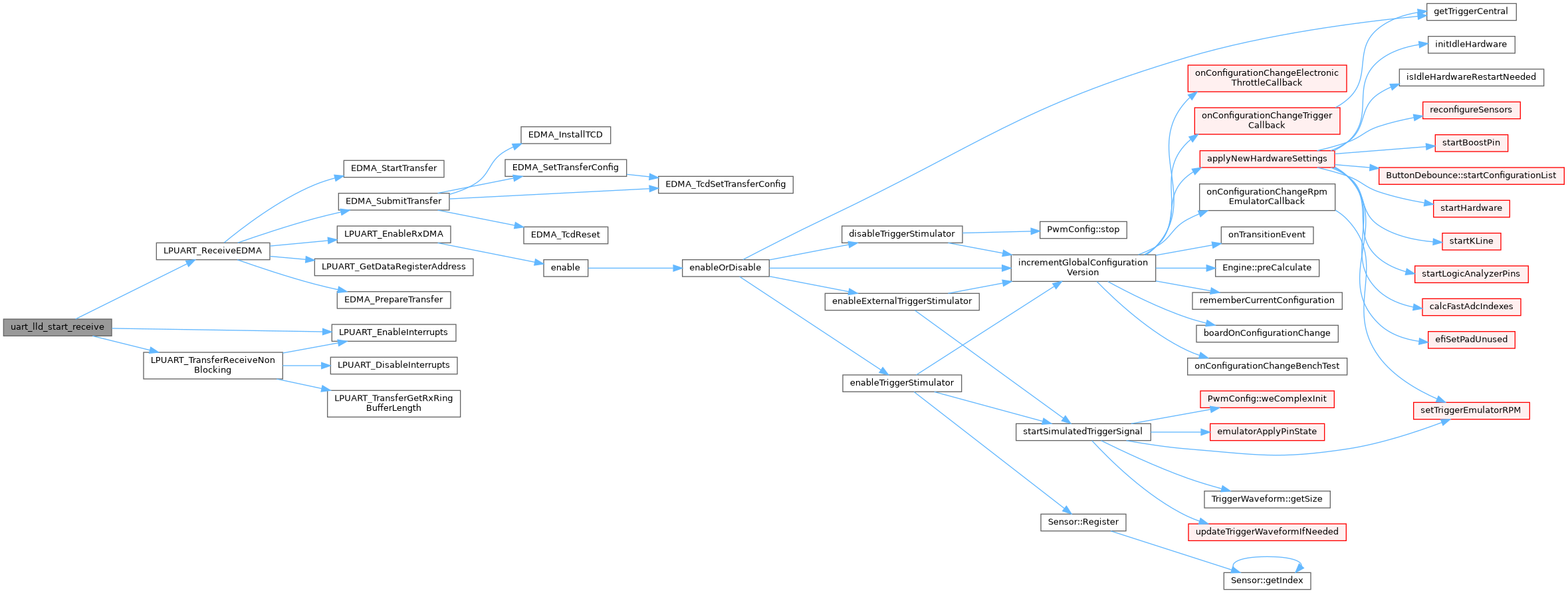
◆ uart_lld_start_receive()
| void uart_lld_start_receive | ( | UARTDriver * | uartp, |
| size_t | n, | ||
| void * | rxbuf | ||
| ) |
Starts a receive operation on the UART peripheral.
- Note
- The buffers are organized as uint8_t arrays for data sizes below or equal to 8 bits else it is organized as uint16_t arrays.
- Parameters
-
[in] uartp pointer to the UARTDriverobject[in] n number of data frames to send [out] rxbuf the pointer to the receive buffer
@notapi
Definition at line 338 of file hal_uart_lld.c.
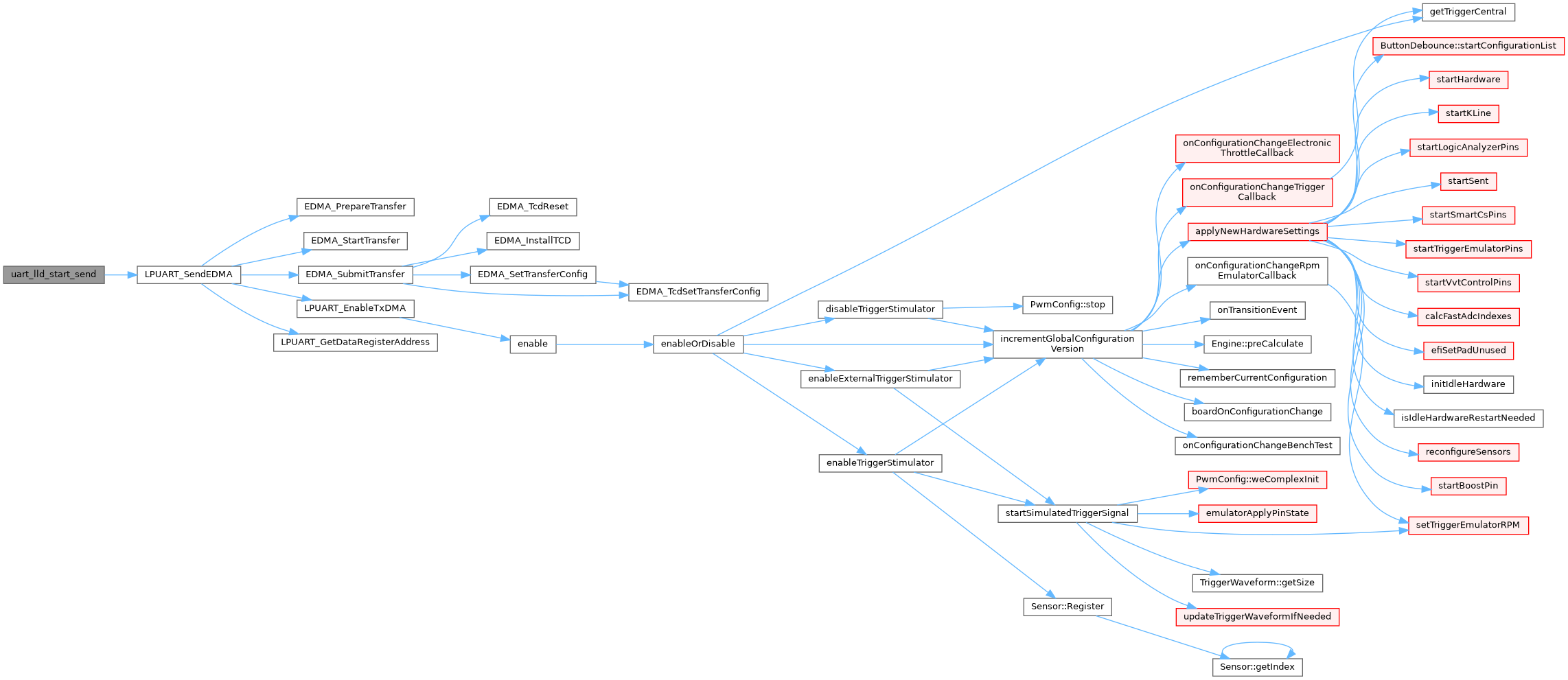
◆ uart_lld_start_send()
| void uart_lld_start_send | ( | UARTDriver * | uartp, |
| size_t | n, | ||
| const void * | txbuf | ||
| ) |
Starts a transmission on the UART peripheral.
- Note
- The buffers are organized as uint8_t arrays for data sizes below or equal to 8 bits else it is organized as uint16_t arrays.
- Parameters
-
[in] uartp pointer to the UARTDriverobject[in] n number of data frames to send [in] txbuf the pointer to the transmit buffer
@notapi
Definition at line 299 of file hal_uart_lld.c.
◆ uart_lld_stop()
| void uart_lld_stop | ( | UARTDriver * | uartp | ) |
Deactivates the UART peripheral.
- Parameters
-
[in] uartp pointer to the UARTDriverobject
@notapi
Definition at line 252 of file hal_uart_lld.c.

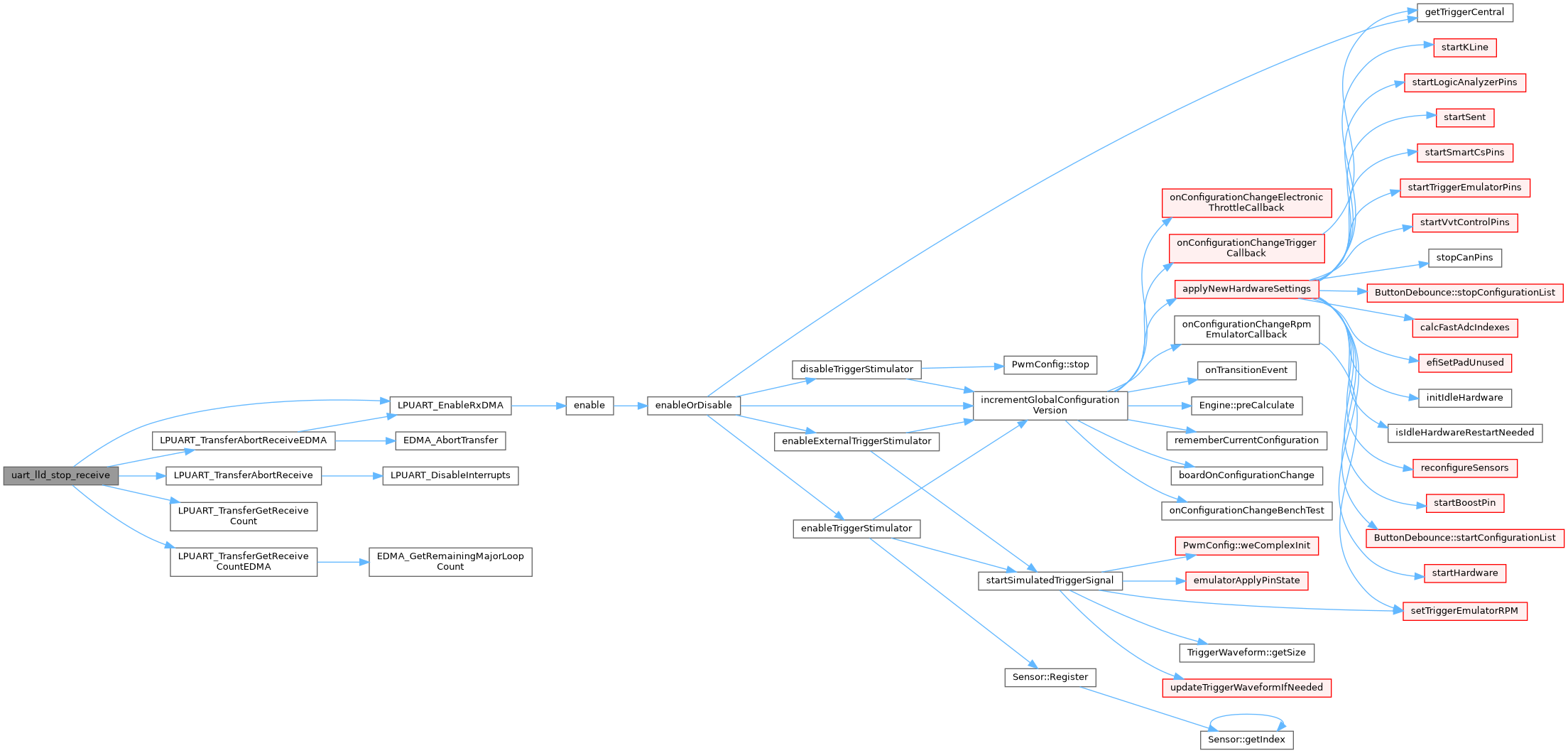
◆ uart_lld_stop_receive()
| size_t uart_lld_stop_receive | ( | UARTDriver * | uartp | ) |
Stops any ongoing receive operation.
- Note
- Stopping a receive operation also suppresses the receive callbacks.
- Parameters
-
[in] uartp pointer to the UARTDriverobject
- Returns
- The number of data frames not received by the stopped receive operation.
@notapi
Definition at line 366 of file hal_uart_lld.c.
◆ uart_lld_stop_send()
| size_t uart_lld_stop_send | ( | UARTDriver * | uartp | ) |
Stops any ongoing transmission.
- Note
- Stopping a transmission also suppresses the transmission callbacks.
- Parameters
-
[in] uartp pointer to the UARTDriverobject
- Returns
- The number of data frames not transmitted by the stopped transmit operation.
@notapi
Definition at line 320 of file hal_uart_lld.c.
Variable Documentation
◆ UARTD1 [1/2]
| UARTDriver UARTD1 |
UART1 driver identifier.
Definition at line 43 of file hal_uart_lld.c.
Referenced by uart_lld_init(), uart_lld_start(), and uart_lld_stop().
◆ UARTD1 [2/2]
|
extern |
UART1 driver identifier.
Definition at line 43 of file hal_uart_lld.c.
Referenced by uart_lld_init(), uart_lld_start(), and uart_lld_stop().
◆ UARTD2 [1/2]
| UARTDriver UARTD2 |
Definition at line 46 of file hal_uart_lld.c.
Referenced by uart_lld_init(), uart_lld_start(), and uart_lld_stop().
◆ UARTD2 [2/2]
|
extern |
Definition at line 46 of file hal_uart_lld.c.
Referenced by uart_lld_init(), uart_lld_start(), and uart_lld_stop().
◆ UARTD3 [1/2]
| UARTDriver UARTD3 |
Definition at line 49 of file hal_uart_lld.c.
Referenced by uart_lld_init(), uart_lld_start(), and uart_lld_stop().
◆ UARTD3 [2/2]
|
extern |
Definition at line 49 of file hal_uart_lld.c.
Referenced by uart_lld_init(), uart_lld_start(), and uart_lld_stop().