Represents a DC motor controller (H-bridge) with some combination of PWM and on/off control pins. 2024: what does 'TwoPin' class name mean? is that just a historic artifact? More...
#include <dc_motor.h>


Public Types | |
| enum class | ControlType { PwmDirectionPins , PwmEnablePin } |
Public Member Functions | |
| TwoPinDcMotor (OutputPin &disable) | |
| void | configure (IPwm &enable, IPwm &dir1, IPwm &dir2, bool isInverted) |
| virtual bool | set (float duty) override |
| float | get () const override |
| Get the current motor duty cycle. | |
| bool | isOpenDirection () const override |
| void | enable () override |
| void | disable (const char *msg) override |
| void | setType (ControlType type) |
 Public Member Functions inherited from DcMotor Public Member Functions inherited from DcMotor | |
| const char * | msg () const |
Private Attributes | |
| IPwm * | m_enable = nullptr |
| IPwm * | m_dir1 = nullptr |
| IPwm * | m_dir2 = nullptr |
| OutputPin *const | m_disable |
| float | m_value = 0 |
| bool | m_isInverted = false |
| ControlType | m_type = ControlType::PwmDirectionPins |
Additional Inherited Members | |
| Protected Attributes inherited from DcMotor | |
| const char * | m_msg = nullptr |
Detailed Description
Represents a DC motor controller (H-bridge) with some combination of PWM and on/off control pins. 2024: what does 'TwoPin' class name mean? is that just a historic artifact?
Definition at line 55 of file dc_motor.h.
Member Enumeration Documentation
◆ ControlType
|
strong |
Definition at line 58 of file dc_motor.h.
Constructor & Destructor Documentation
◆ TwoPinDcMotor()
| TwoPinDcMotor::TwoPinDcMotor | ( | OutputPin & | disable | ) |
- Parameters
-
enable IPwm driver for enable pin, for PWM speed control. dir1 Enable 1 or direction 1 pin. Gets set high to rotate forward. dir2 Enable 2 or direction 2 pin. Gets set high to rotate backward.
Definition at line 13 of file dc_motor.cpp.

Member Function Documentation
◆ configure()
Definition at line 19 of file dc_motor.cpp.
Referenced by DcHardware::start().


◆ disable()
|
overridevirtual |
Implements DcMotor.
Definition at line 34 of file dc_motor.cpp.
Referenced by TwoPinDcMotor().


◆ enable()
|
overridevirtual |
Implements DcMotor.
Definition at line 26 of file dc_motor.cpp.
Referenced by configure().


◆ get()
|
overridevirtual |
Get the current motor duty cycle.
- Returns
- The current duty cycle setting. +1.0f represents full power forward, and -1.0f represents full power backward.
Implements DcMotor.
Definition at line 48 of file dc_motor.cpp.
Referenced by showDcMotorInfo(), and updateTunerStudioState().

◆ isOpenDirection()
|
overridevirtual |
Implements DcMotor.
Definition at line 44 of file dc_motor.cpp.
Referenced by showDcMotorInfo().

◆ set()
- Parameters
-
duty value between -1.0 and 1.0
Implements DcMotor.
Definition at line 55 of file dc_motor.cpp.
Referenced by disable(), and setDcMotorDuty().


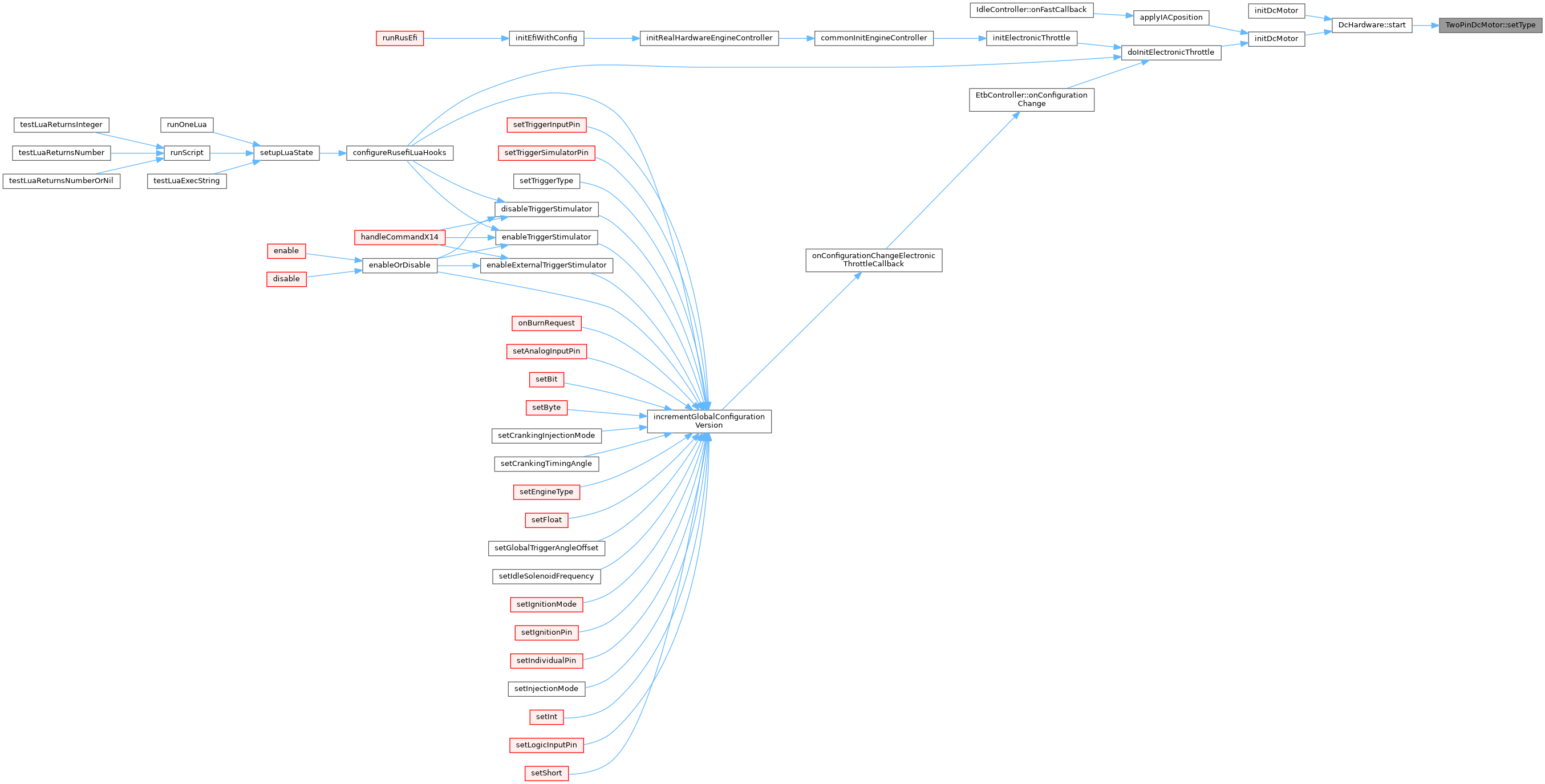
◆ setType()
|
inline |
Definition at line 106 of file dc_motor.h.
Referenced by DcHardware::start().
Field Documentation
◆ m_dir1
|
private |
Definition at line 82 of file dc_motor.h.
Referenced by configure(), and set().
◆ m_dir2
|
private |
Definition at line 83 of file dc_motor.h.
Referenced by configure(), and set().
◆ m_disable
|
private |
Definition at line 84 of file dc_motor.h.
◆ m_enable
|
private |
Definition at line 81 of file dc_motor.h.
Referenced by configure(), and set().
◆ m_isInverted
|
private |
Definition at line 86 of file dc_motor.h.
Referenced by configure(), and set().
◆ m_type
|
private |
Definition at line 88 of file dc_motor.h.
◆ m_value
|
private |
Definition at line 85 of file dc_motor.h.
Referenced by get(), isOpenDirection(), and set().
The documentation for this class was generated from the following files:
- controllers/system/dc_motor.h
- controllers/system/dc_motor.cpp