#include <gc_generic.h>
Inheritance diagram for GenericGearController:
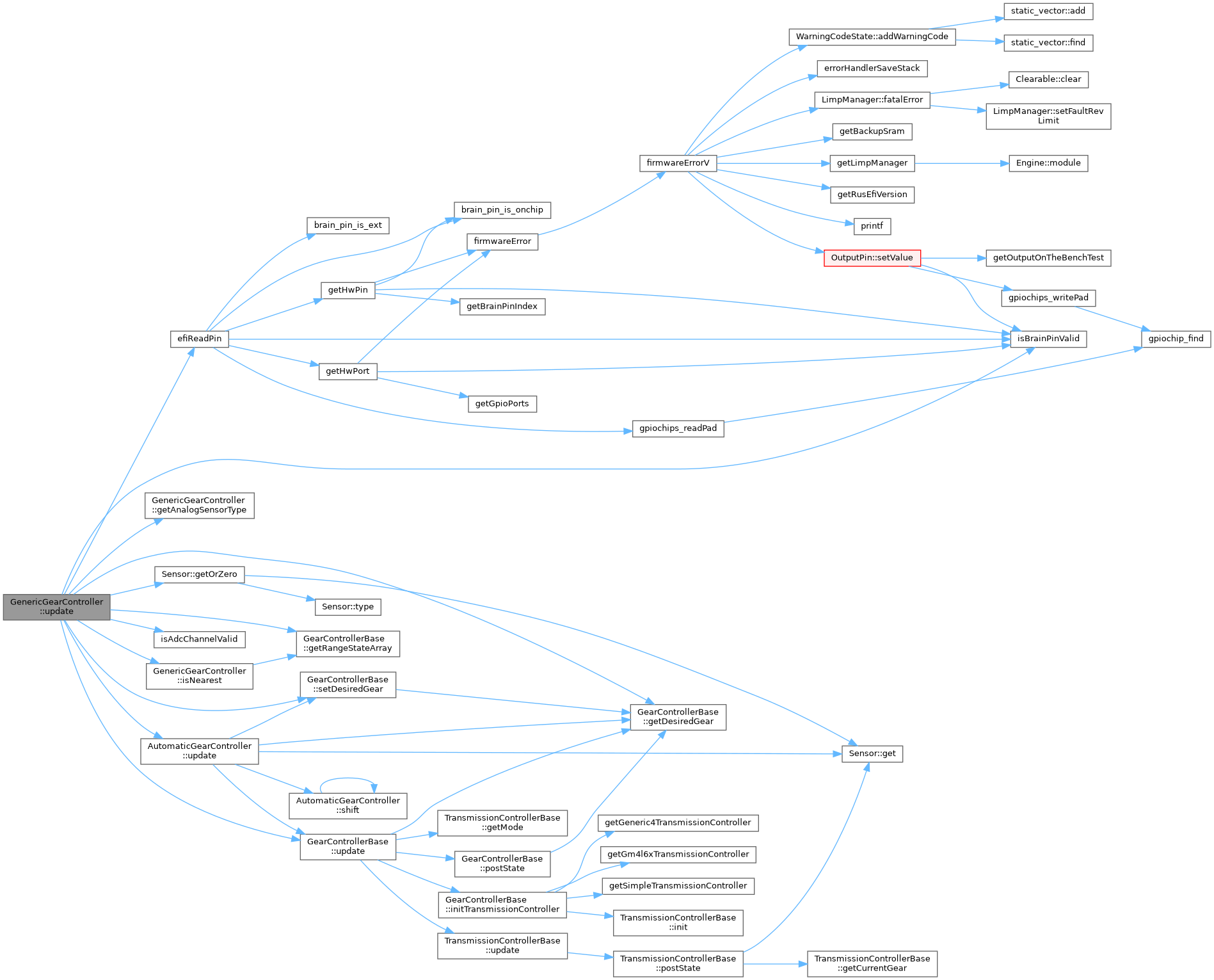
Collaboration diagram for GenericGearController:

Public Member Functions | |
| GenericGearController () | |
| void | update () |
| void | init () |
| GearControllerMode | getMode () const |
 Public Member Functions inherited from AutomaticGearController Public Member Functions inherited from AutomaticGearController | |
| AutomaticGearController () | |
| void | findDesiredGear () |
| Public Member Functions inherited from GearControllerBase | |
| virtual gear_e | getDesiredGear () const |
Private Member Functions | |
| bool | isNearest (float value, int pinIndex, float *rangeStates) |
| SensorType | getAnalogSensorType (int zeroBasedSensorIndex) |
Private Attributes | |
| Timer | shiftTimer |
| SelectedGear | lastRange |
Additional Inherited Members | |
| Data Fields inherited from GearControllerBase | |
| TransmissionControllerBase * | transmissionController |
| Protected Member Functions inherited from GearControllerBase | |
| virtual gear_e | setDesiredGear (gear_e) |
| void | initTransmissionController () |
| float * | getRangeStateArray (int) |
Detailed Description
Definition at line 7 of file gc_generic.h.
Constructor & Destructor Documentation
◆ GenericGearController()
| GenericGearController::GenericGearController | ( | ) |
Definition at line 9 of file gc_generic.cpp.
9 {
10}
Member Function Documentation
◆ getAnalogSensorType()
|
private |
Definition at line 22 of file gc_generic.cpp.
22 {
23 return static_cast<SensorType>(zeroBasedSensorIndex + static_cast<int>(SensorType::RangeInput1));
24}
@ RangeInput1
Referenced by update().
Here is the caller graph for this function:

◆ getMode()
|
inlinevirtual |
Reimplemented from AutomaticGearController.
Definition at line 13 of file gc_generic.h.
◆ init()
|
virtual |
Reimplemented from GearControllerBase.
Definition at line 12 of file gc_generic.cpp.
12 {
15 efiSetPadMode("Range Input", engineConfiguration->tcu_rangeInput[i], getInputMode(engineConfiguration->tcu_rangeInputMode[i]));
16 }
17 }
18
19 GearControllerBase::init();
20}
void efiSetPadMode(const char *msg, brain_pin_e brainPin, iomode_t mode)
Definition bootloader_main.cpp:207
static constexpr engine_configuration_s * engineConfiguration
Definition engine_configuration.h:80
pin_input_mode_e tcu_rangeInputMode[RANGE_INPUT_COUNT]
switch_input_pin_e tcu_rangeInput[RANGE_INPUT_COUNT]
Here is the call graph for this function:

◆ isNearest()
Definition at line 26 of file gc_generic.cpp.
26 {
27 float distance = fabs(rangeStates[pinIndex] - value);
28 for (int i = 1; i <= TCU_RANGE_COUNT; i++) {
30 if (pinDistance < distance) {
31 return false;
32 }
33 }
34 return true;
35}
float * getRangeStateArray(int)
Definition gear_controller.cpp:77
Referenced by update().
Here is the call graph for this function:

Here is the caller graph for this function:

◆ update()
|
virtual |
Reimplemented from AutomaticGearController.
Definition at line 37 of file gc_generic.cpp.
37 {
39 // Loop through possible range states
40 // 1 based because 0 is SelectedGear::Invalid
41 for (int i = 1; i <= TCU_RANGE_COUNT; i++) {
43 // Loop through inputs
45 float cellState = rangeStates[p];
46 // We allow the user to configure either a digital input or an analog input for each pin,
47 // so we need to check which is valid.
51 // Set the gear to the one we're checking, and continue to the next pin
53 } else {
54 // This possibility doesn't match, set to invalid
55 gear = SelectedGear::Invalid;
56 }
58 // If we've locked out this range with 3 in a cell
59 if (cellState == 3) {
60 gear = SelectedGear::Invalid;
61 break;
62 }
64 // If the pin doesn't matter, or if it matches the cellState
65 if (cellState == 2 || (pinState && cellState == 1) || (!pinState && cellState == 0)) {
66 // Set the gear to the one we're checking, and continue to the next pin
68 } else {
69 // This possibility doesn't match, set to invalid
70 gear = SelectedGear::Invalid;
71 }
72 }
73 }
74 // If we didn't find it, try the next range
76 continue;
77 // We found a match
78 } else {
79 break;
80 }
81 }
83 switch (gear) {
86 break;
89 break;
92 break;
95 break;
99 break;
101 // Only allow manual shift once per 500 ms,
102 // and if the selected range was Manual prior to this update
104 break;
105 }
106 shiftTimer.reset();
110 break;
113 break;
116 break;
117 default:
118 break;
119 }
120 break;
122 // Only allow manual shift once per 500 ms,
123 // and if the selected range was Manual prior to this update
125 break;
126 }
127 shiftTimer.reset();
131 break;
134 break;
137 break;
138 default:
139 break;
140 }
141 break;
143 // If the gear selector is in drive, let AutomaticGearController,
144 // which this class inherits from, decide what gear the transmission should be in.
146 return;
147 default:
148 break;
149 }
150
151 lastRange = gear;
152 }
153
154 GearControllerBase::update();
155}
virtual gear_e getDesiredGear() const
Definition gear_controller.cpp:47
virtual gear_e setDesiredGear(gear_e)
Definition gear_controller.cpp:51
bool isNearest(float value, int pinIndex, float *rangeStates)
Definition gc_generic.cpp:26
SensorType getAnalogSensorType(int zeroBasedSensorIndex)
Definition gc_generic.cpp:22
@ Invalid
@ Reverse
@ Park
@ Manual2
@ ManualMinus
@ ManualPlus
@ Manual
@ Manual1
@ Neutral
@ Drive
@ Manual3
adc_channel_e tcu_rangeAnalogInput[RANGE_INPUT_COUNT]
Here is the call graph for this function:
Field Documentation
◆ lastRange
|
private |
Definition at line 18 of file gc_generic.h.
Referenced by update().
◆ shiftTimer
|
private |
Definition at line 17 of file gc_generic.h.
Referenced by update().
The documentation for this class was generated from the following files:
- controllers/tcu/gc_generic.h
- controllers/tcu/gc_generic.cpp