#include <gc_auto.h>
Inheritance diagram for AutomaticGearController:
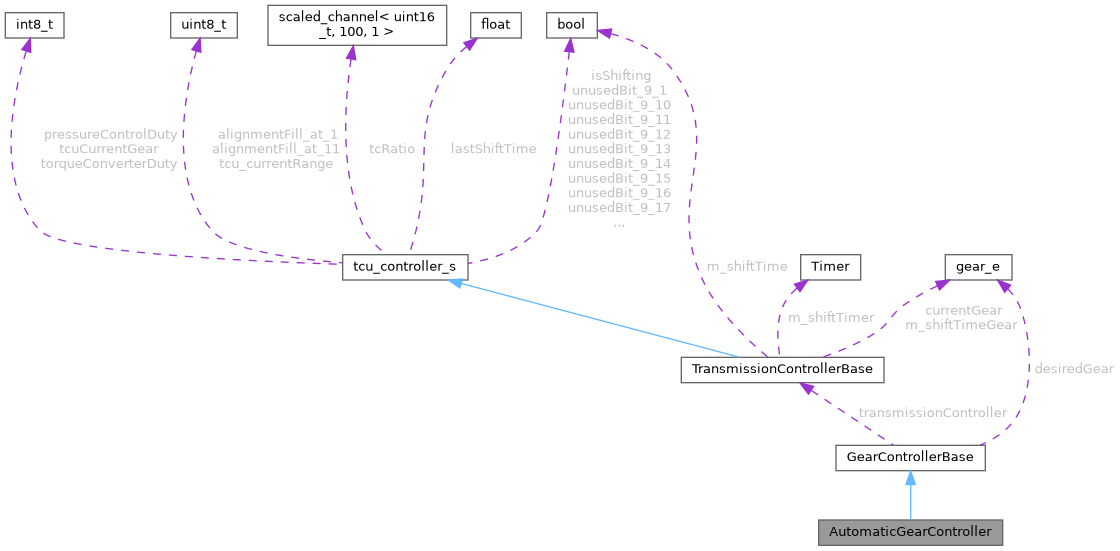
Collaboration diagram for AutomaticGearController:
Public Member Functions | |
| AutomaticGearController () | |
| void | update () |
| void | findDesiredGear () |
| GearControllerMode | getMode () const |
 Public Member Functions inherited from GearControllerBase Public Member Functions inherited from GearControllerBase | |
| virtual gear_e | getDesiredGear () const |
| virtual void | init () |
Private Member Functions | |
| void | shift (float speed, float throttle, uint8_t(*curve)[TCU_TABLE_WIDTH], gear_e gear) |
| void | shift (float speed, float throttle, uint8_t(*curve)[TCU_TABLE_WIDTH], gear_e gear, bool down) |
Additional Inherited Members | |
| Data Fields inherited from GearControllerBase | |
| TransmissionControllerBase * | transmissionController |
| Protected Member Functions inherited from GearControllerBase | |
| virtual gear_e | setDesiredGear (gear_e) |
| void | initTransmissionController () |
| float * | getRangeStateArray (int) |
Detailed Description
Constructor & Destructor Documentation
◆ AutomaticGearController()
| AutomaticGearController::AutomaticGearController | ( | ) |
Definition at line 8 of file gc_auto.cpp.
8 {
9}
Member Function Documentation
◆ findDesiredGear()
| void AutomaticGearController::findDesiredGear | ( | ) |
◆ getMode()
|
inlinevirtual |
Reimplemented from GearControllerBase.
Reimplemented in GenericGearController.
◆ shift() [1/2]
|
private |
Definition at line 43 of file gc_auto.cpp.
43 {
45}
void shift(float speed, float throttle, uint8_t(*curve)[TCU_TABLE_WIDTH], gear_e gear)
Definition gc_auto.cpp:43
Referenced by shift(), and update().
Here is the call graph for this function:

Here is the caller graph for this function:

◆ shift() [2/2]
|
private |
Definition at line 47 of file gc_auto.cpp.
47 {
49
50 if ((down && speed < curveSpeed) || (!down && speed > curveSpeed)) {
51 setDesiredGear(gear);
52 }
53}
virtual gear_e setDesiredGear(gear_e)
Definition gear_controller.cpp:51
scaled_channel< uint8_t, 1, 1 > tcu_shiftTpsBins[TCU_TABLE_WIDTH]
Here is the call graph for this function:

◆ update()
|
virtual |
Reimplemented from GearControllerBase.
Reimplemented in GenericGearController.
Definition at line 11 of file gc_auto.cpp.
11 {
14
17 }
18
19 if (tps.Valid && vss.Valid) {
23 break;
27 break;
31 break;
34 break;
35 default :
36 break;
37 }
38 }
39
41}
virtual gear_e getDesiredGear() const
Definition gear_controller.cpp:47
virtual SensorResult get() const =0
@ VehicleSpeed
@ DriverThrottleIntent
uint8_t tcu_shiftSpeed12[TCU_TABLE_WIDTH]
uint8_t tcu_shiftSpeed43[TCU_TABLE_WIDTH]
uint8_t tcu_shiftSpeed34[TCU_TABLE_WIDTH]
uint8_t tcu_shiftSpeed32[TCU_TABLE_WIDTH]
uint8_t tcu_shiftSpeed21[TCU_TABLE_WIDTH]
uint8_t tcu_shiftSpeed23[TCU_TABLE_WIDTH]
Referenced by GenericGearController::update().
Here is the call graph for this function:
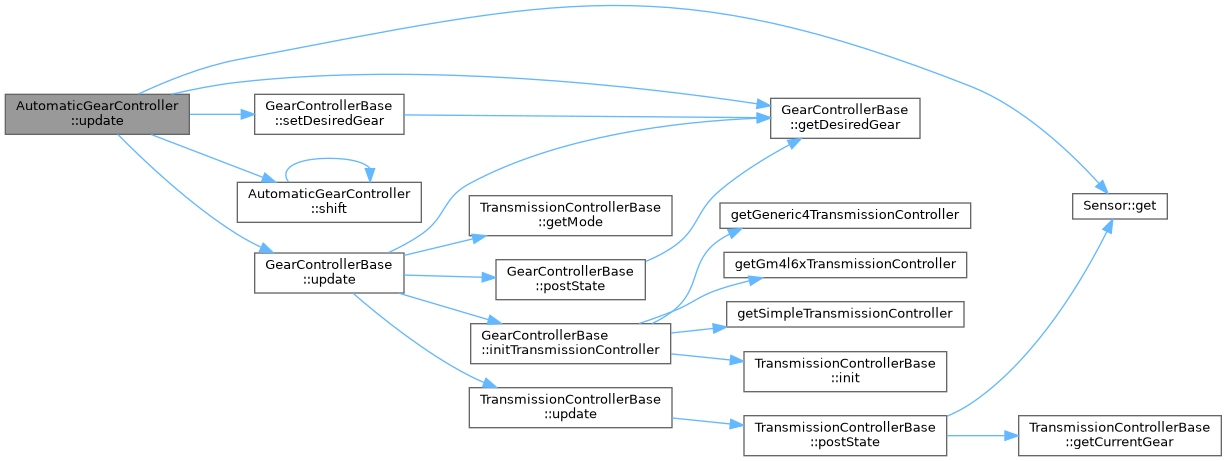
Here is the caller graph for this function:

The documentation for this class was generated from the following files:
- controllers/tcu/gc_auto.h
- controllers/tcu/gc_auto.cpp