Functions | |
| void | initialize2jzGE3_34_simulation_shape (TriggerWaveform *s) |
| void | initializeUzCam (TriggerWaveform *s) |
Function Documentation
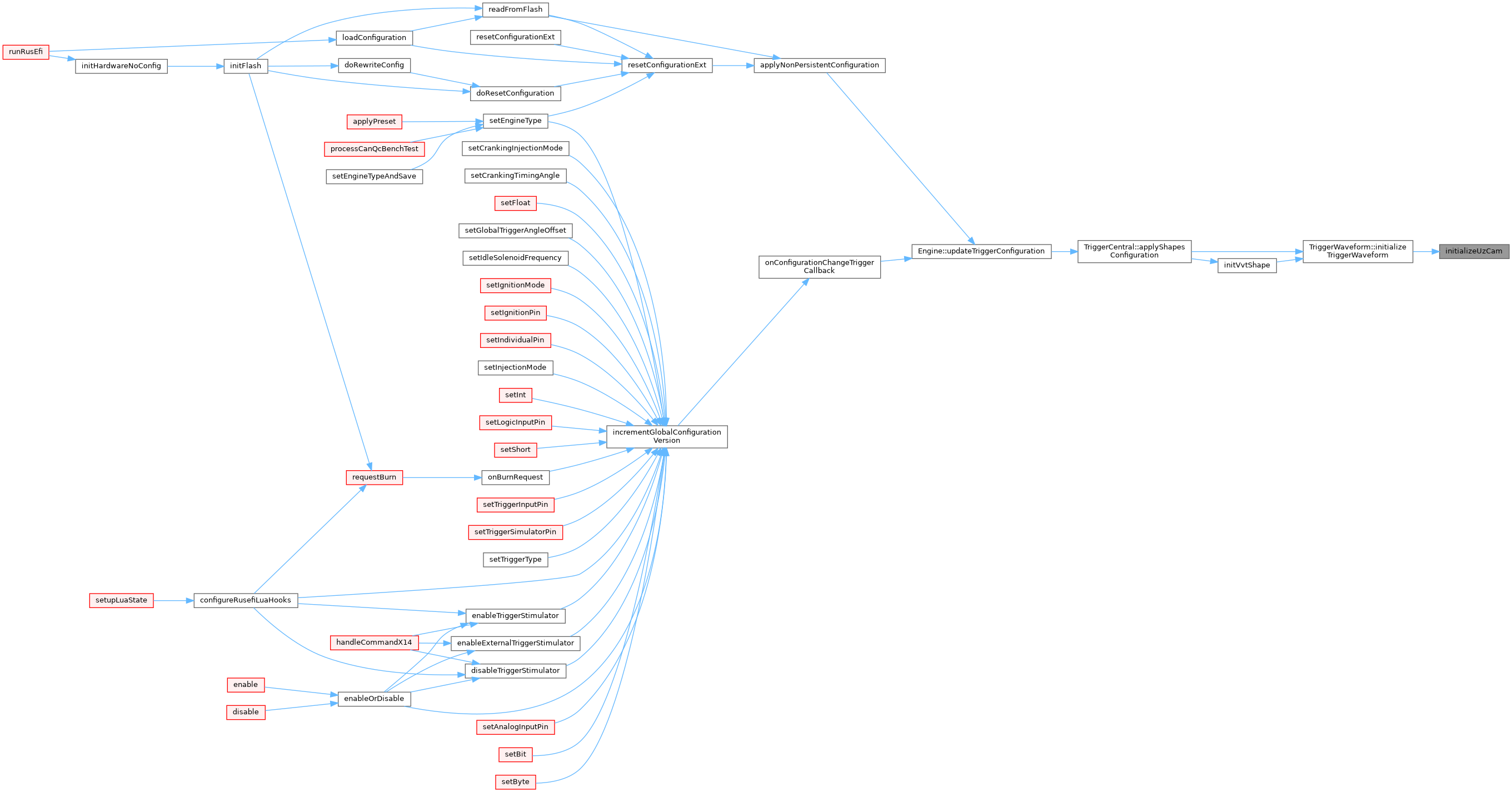
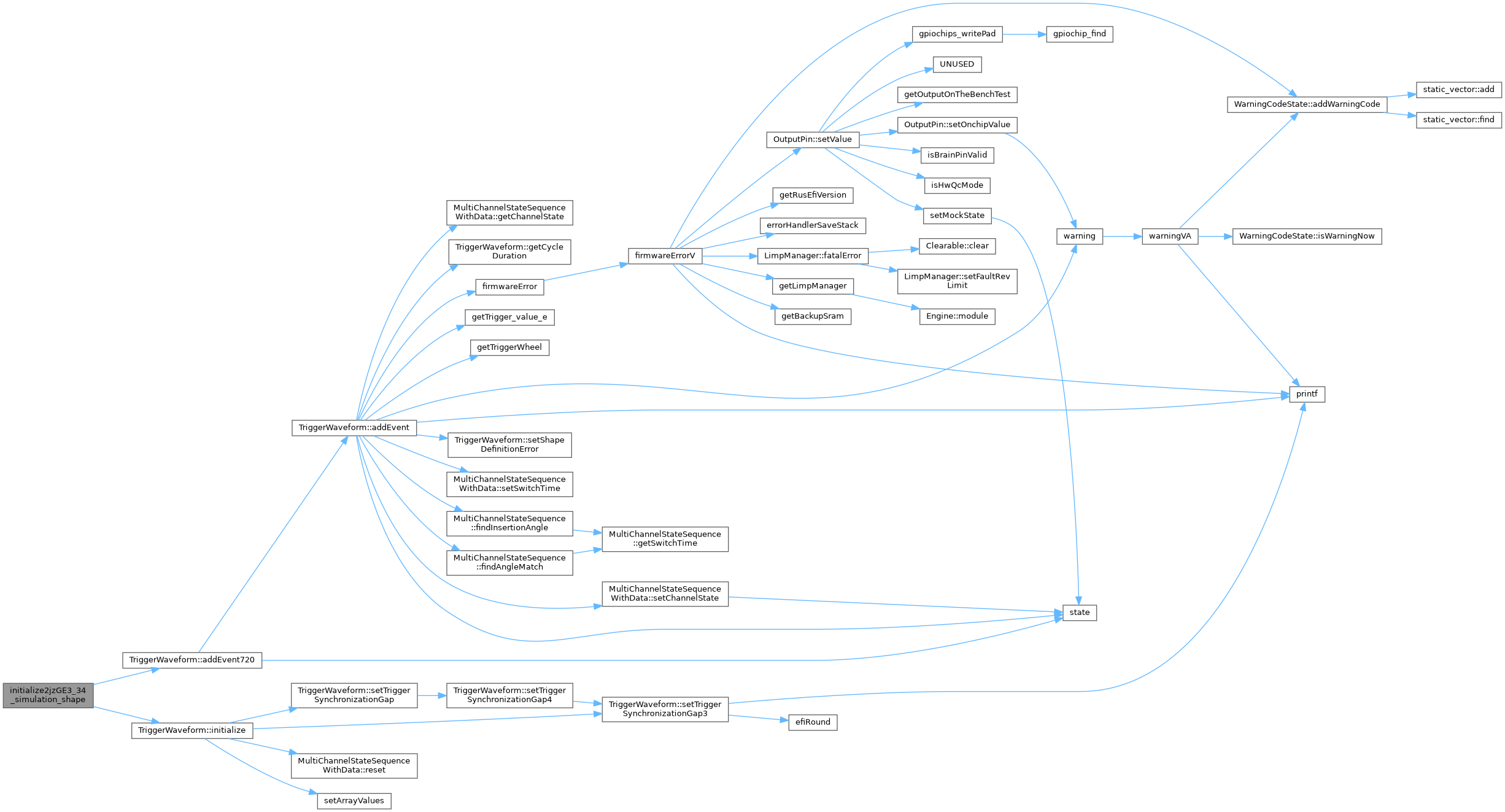
◆ initialize2jzGE3_34_simulation_shape()
| void initialize2jzGE3_34_simulation_shape | ( | TriggerWaveform * | s | ) |
https://rusefi.com/forum/viewtopic.php?f=5&t=1720
Definition at line 17 of file trigger_toyota.cpp.
17 {
19
20 float camD = 720 / 6; // 120
21
22 float crankDelta = 720 / 36 / 2; // 10
23
24 float camAngle = 1;
25 float crankAngle = 2 * crankDelta; // skipping two teeth
26
27 for (int i = 0; i < 10; i++) {
30 crankAngle += 10;
31 } // 2 + 10
32
33 camAngle += camD;
36
37 for (int i = 0; i < 12; i++) {
40 crankAngle += 10;
41 } // 2 + 22
42
43
44 camAngle += camD;
45
46 for (int i = 0; i < 12; i++) {
49 crankAngle += crankDelta;
50 } // 2 + 34
51
52 camAngle += camD;
55
56 crankAngle += 20; // skipping two teeth one more time
57 for (int i = 0; i < 10; i++) {
60 crankAngle += crankDelta;
61 } // 2 + 10
62
63 camAngle += camD;
64
65 for (int i = 0; i < 12; i++) {
68 crankAngle += crankDelta;
69 } // 2 + 22
70
71 camAngle += camD;
74
75
76 for (int i = 0; i < 12; i++) {
79 crankAngle += 10;
80 } // 2 + 32
81 camAngle += camD;
82
85}
bool isSynchronizationNeeded
Definition trigger_structure.h:57
void initialize(operation_mode_e operationMode, SyncEdge syncEdge)
Definition trigger_structure.cpp:65
void addEvent720(angle_t angle, TriggerValue const state, TriggerWheel const channelIndex=TriggerWheel::T_PRIMARY)
Definition trigger_structure.cpp:246
@ T_PRIMARY
@ T_SECONDARY
@ RISE
@ FALL
@ Rise
Referenced by TriggerWaveform::initializeTriggerWaveform().
Here is the call graph for this function:
Here is the caller graph for this function:
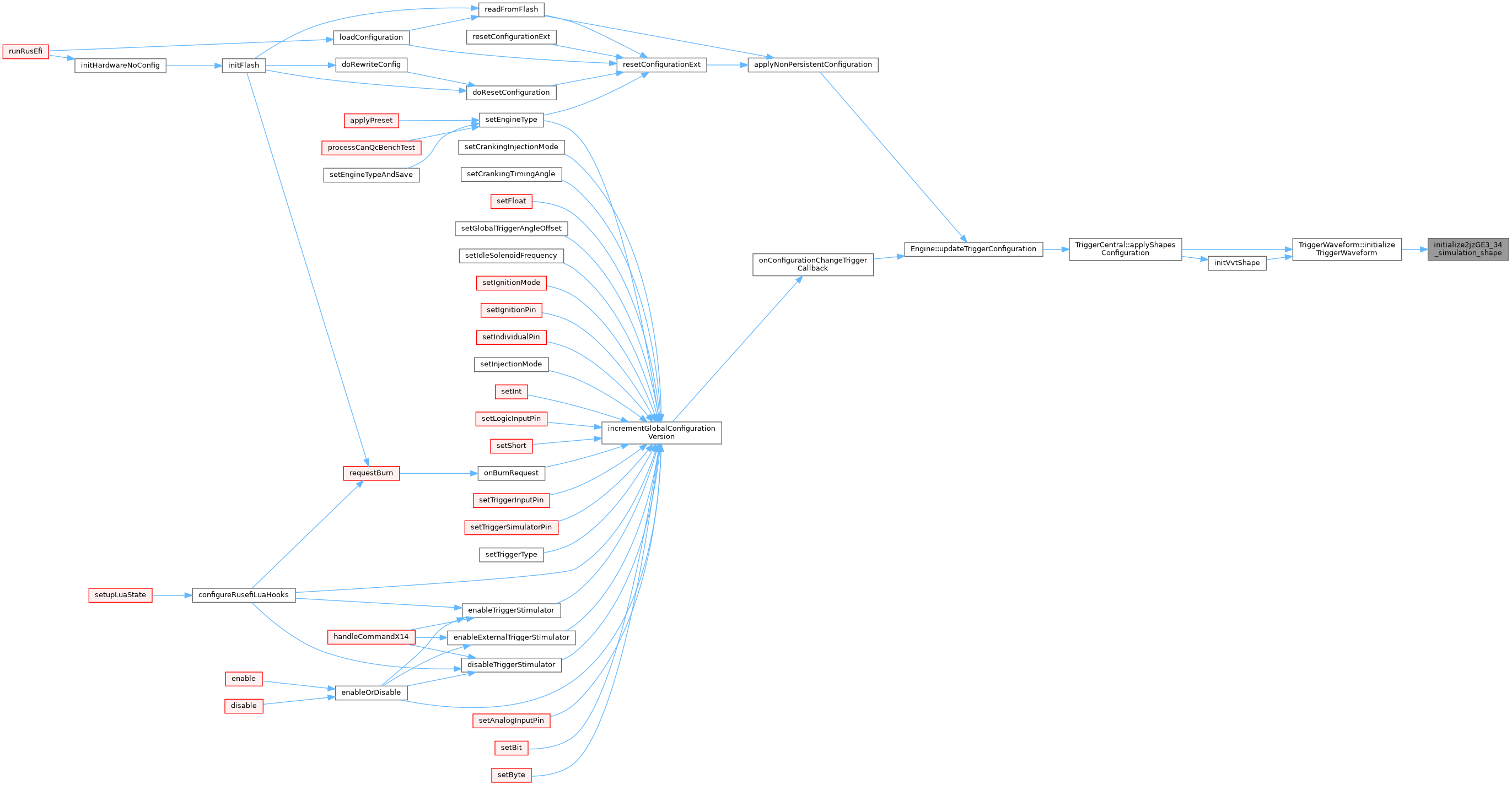
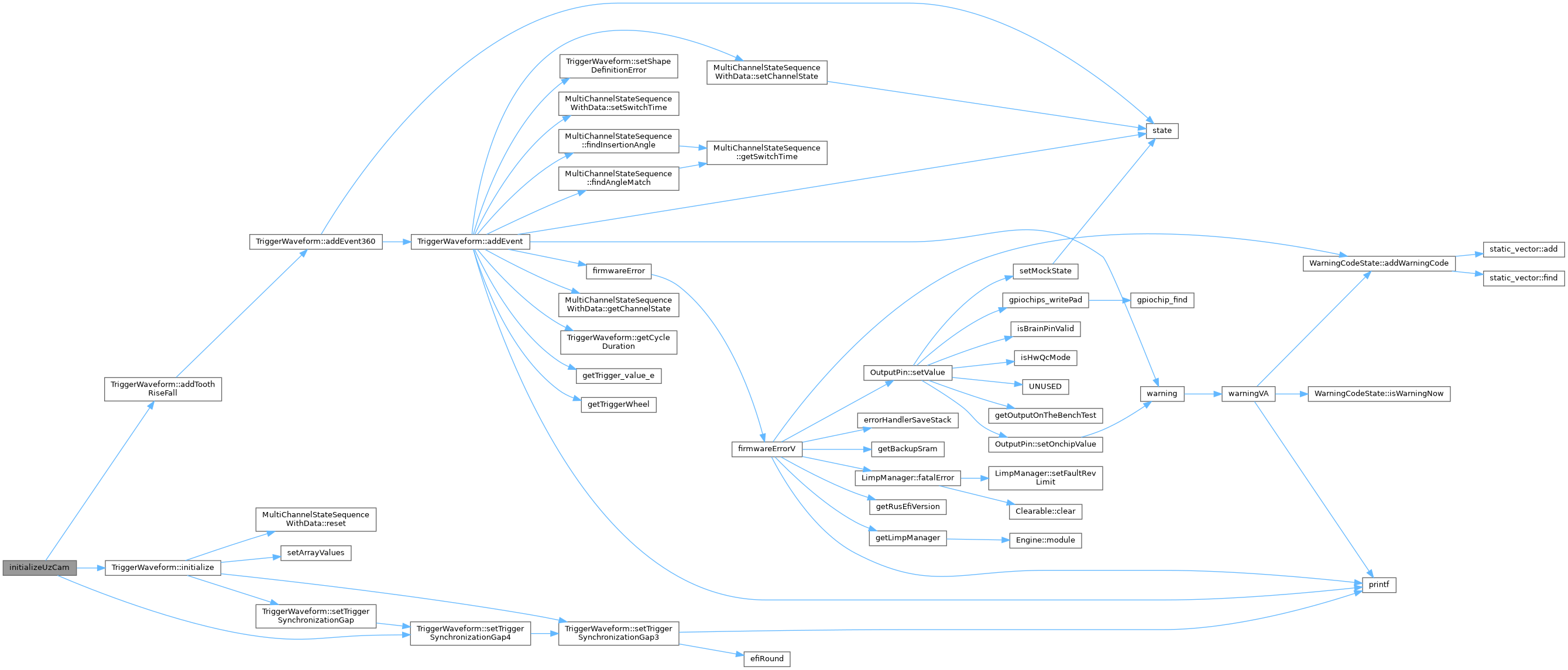
◆ initializeUzCam()
| void initializeUzCam | ( | TriggerWaveform * | s | ) |
Definition at line 87 of file trigger_toyota.cpp.
87 {
89 int width = 5;
90
91 s->addToothRiseFall(135, width);
92 s->addToothRiseFall(270, width);
93 s->addToothRiseFall(360, width);
94
97}
void addToothRiseFall(angle_t angle, angle_t width=10, TriggerWheel const channelIndex=TriggerWheel::T_PRIMARY)
Definition trigger_structure.cpp:256
void setTriggerSynchronizationGap4(int index, float syncRatio)
Definition trigger_structure.h:201
@ RiseOnly
Referenced by TriggerWaveform::initializeTriggerWaveform().
Here is the call graph for this function:
Here is the caller graph for this function: