Functions | |
| void | initializeRoverK (TriggerWaveform *s) |
Function Documentation
◆ initializeRoverK()
| void initializeRoverK | ( | TriggerWaveform * | s | ) |
https://en.wikipedia.org/wiki/Rover_K-series_engine
Definition at line 16 of file trigger_rover.cpp.
16 {
18
19 float tooth = 20;
20
21 s->setTriggerSynchronizationGap(2.0);
22 // wow that's odd
23 s->setSecondTriggerSynchronizationGap2(0.0001, 100000);
24 s->setThirdTriggerSynchronizationGap(2);
25
26 float base = 0;
27
28 for (int i = 0; i < 2; i++) {
31 base += tooth;
32 }
33 base += tooth;
34 for (int i = 0; i < 2; i++) {
37 base += tooth;
38 }
39 base += tooth;
40 for (int i = 0; i < 14; i++) {
43 base += tooth;
44 }
45 base += tooth;
46 for (int i = 0; i < 3; i++) {
49 base += tooth;
50 }
51 base += tooth;
52 for (int i = 0; i < 11; i++) {
55 base += tooth;
56 }
57
58}
void initialize(operation_mode_e operationMode, SyncEdge syncEdge)
Definition trigger_structure.cpp:65
void setTriggerSynchronizationGap(float syncRatio)
Definition trigger_structure.cpp:423
void addEvent720(angle_t angle, TriggerValue const state, TriggerWheel const channelIndex=TriggerWheel::T_PRIMARY)
Definition trigger_structure.cpp:246
void setSecondTriggerSynchronizationGap2(float syncRatioFrom, float syncRatioTo)
Definition trigger_structure.cpp:431
void setThirdTriggerSynchronizationGap(float syncRatio)
Definition trigger_structure.cpp:435
@ RISE
@ FALL
@ RiseOnly
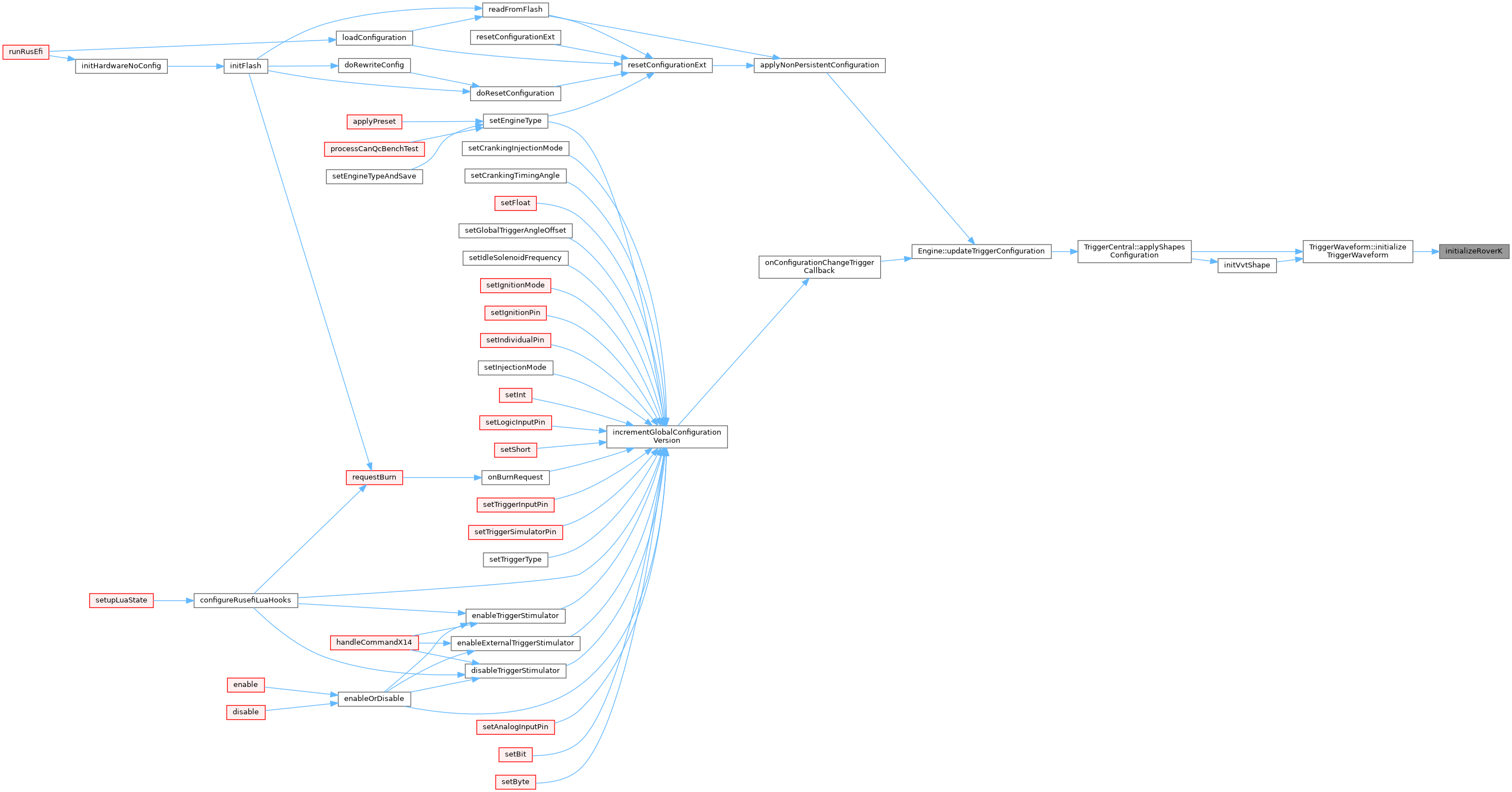
Referenced by TriggerWaveform::initializeTriggerWaveform().
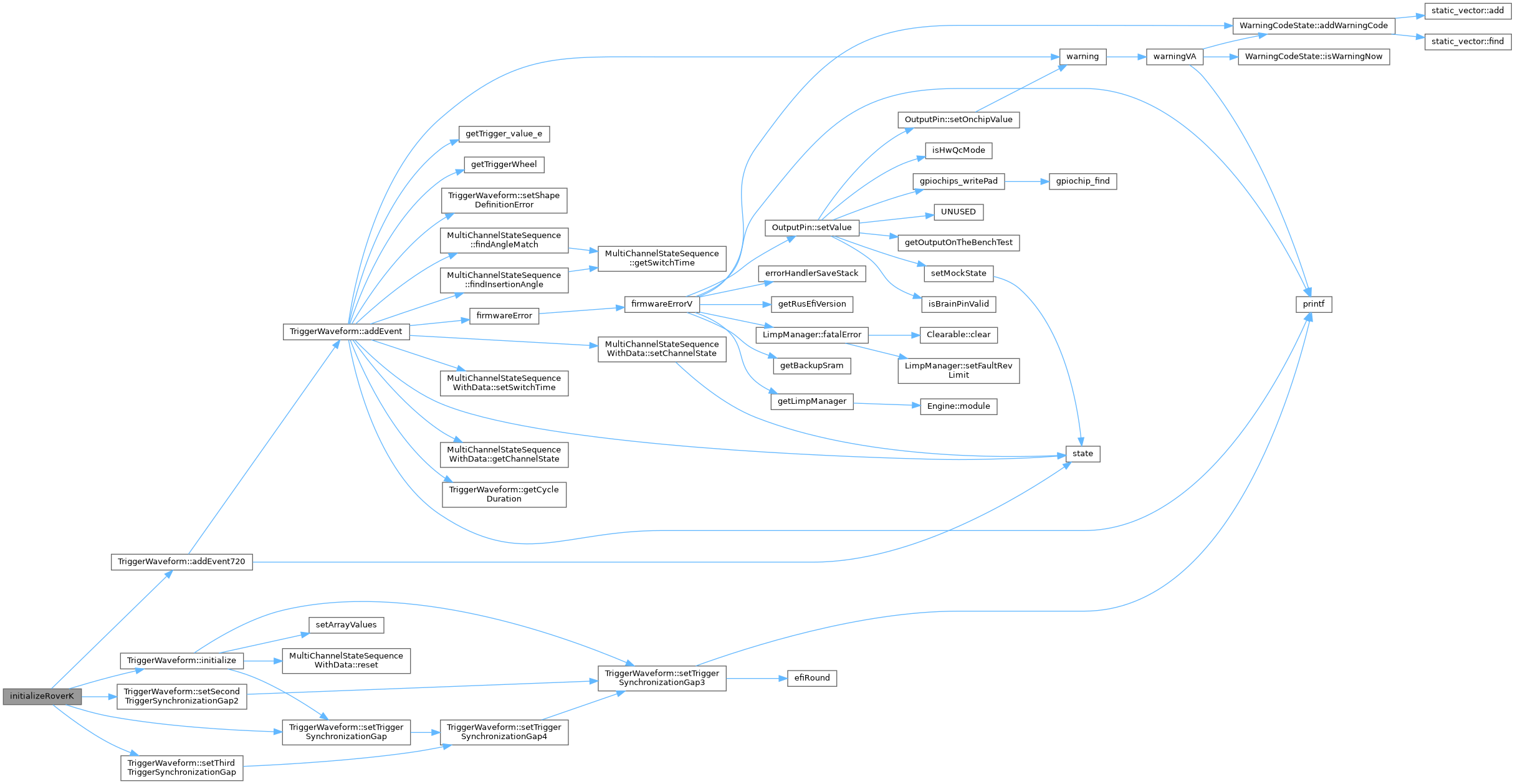
Here is the call graph for this function:
Here is the caller graph for this function: