Detailed Description
https://en.wikipedia.org/wiki/Renix Has something to do with AMC/Jeep
- Date
- Apr 18, 2020
Definition in file trigger_renix.cpp.
Functions | |
| static void | commonRenix (TriggerWaveform *s) |
| void | initializeRenix44_2_2 (TriggerWaveform *s) |
| void | initializeRenix66_2_2 (TriggerWaveform *s) |
| void | JeepRenix66_2_2 (TriggerWaveform *s, size_t halfCylinderCount, size_t totalWheel, size_t missing) |
| void | initializeJeepRenix66_2_2 (TriggerWaveform *s) |
Function Documentation
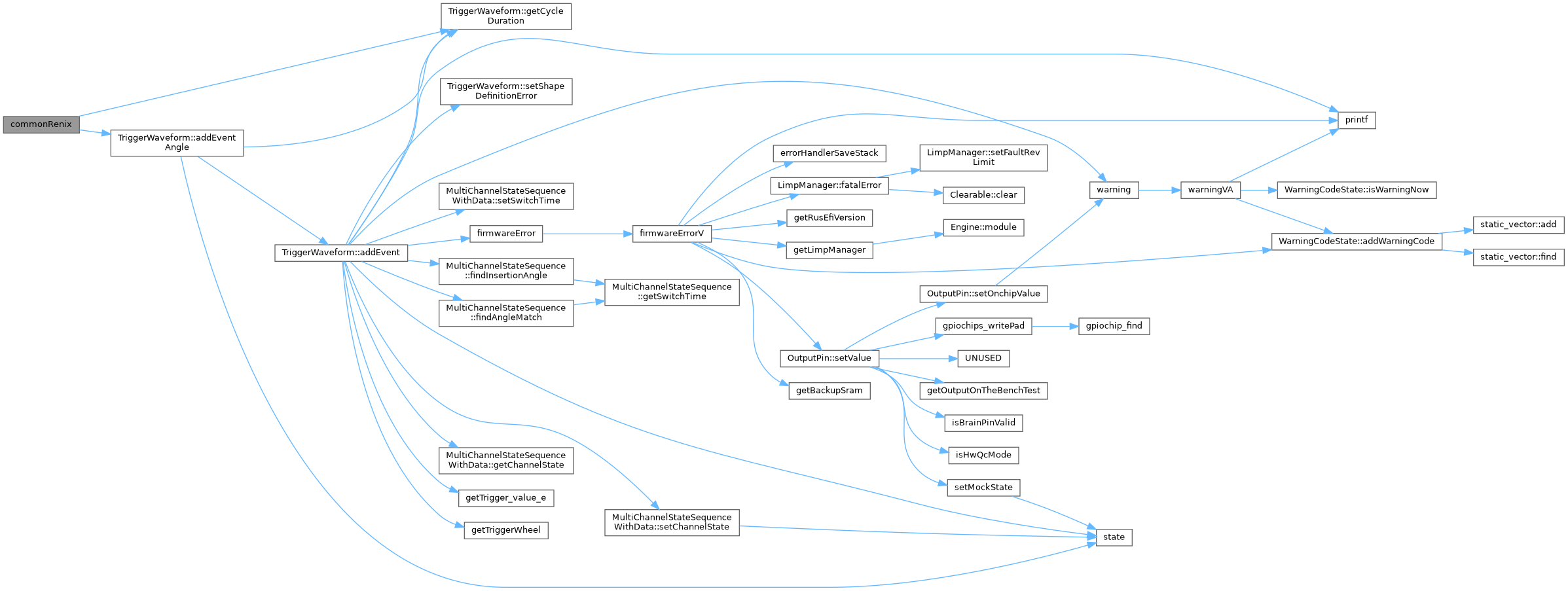
◆ commonRenix()
|
static |
Definition at line 15 of file trigger_renix.cpp.
15 {
16 // 44-2-2 is symmetrical so we only need to define one half
19
20 float currentAngle = 0;
21 for (int i = 0;i < 20;i++) {
24 currentAngle += tooth;
25 }
26
28
29 // float math error accumulates at this point so we have to spell out 180
31}
angle_t getCycleDuration() const
Definition trigger_structure.cpp:115
void addEventAngle(angle_t angle, TriggerValue const state, TriggerWheel const channelIndex=TriggerWheel::T_PRIMARY)
Definition trigger_structure.cpp:266
@ RISE
@ FALL
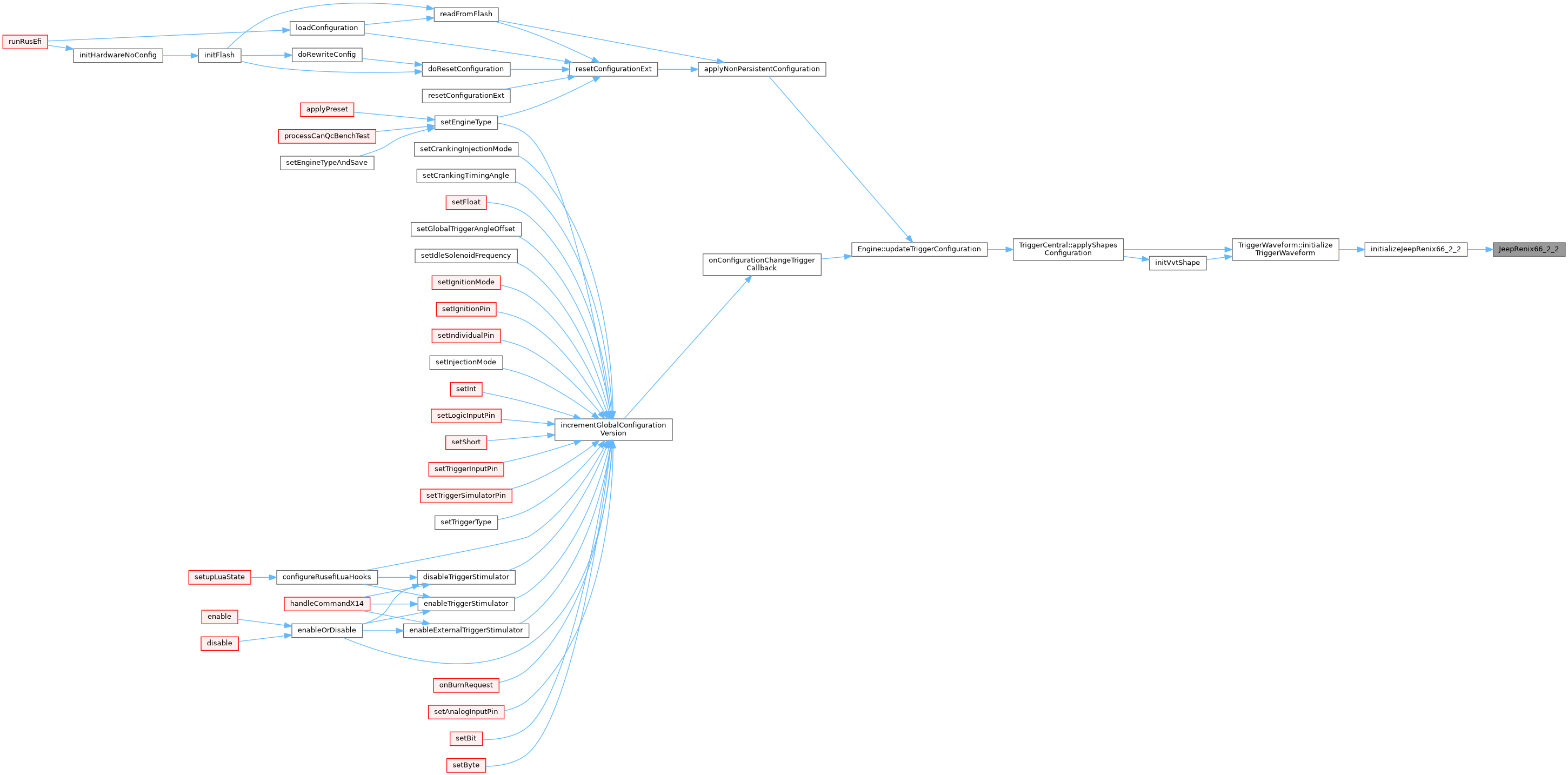
Referenced by initializeRenix44_2_2(), and initializeRenix66_2_2().
Here is the call graph for this function:
Here is the caller graph for this function:
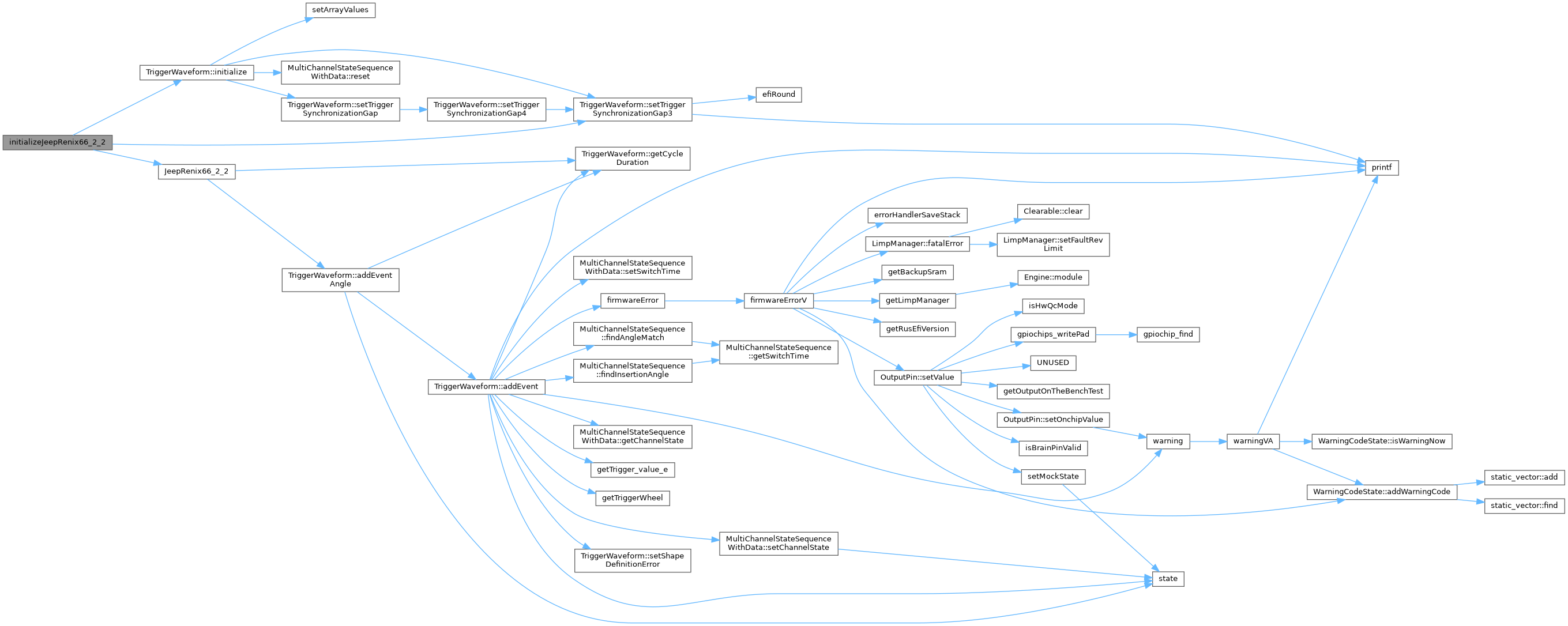
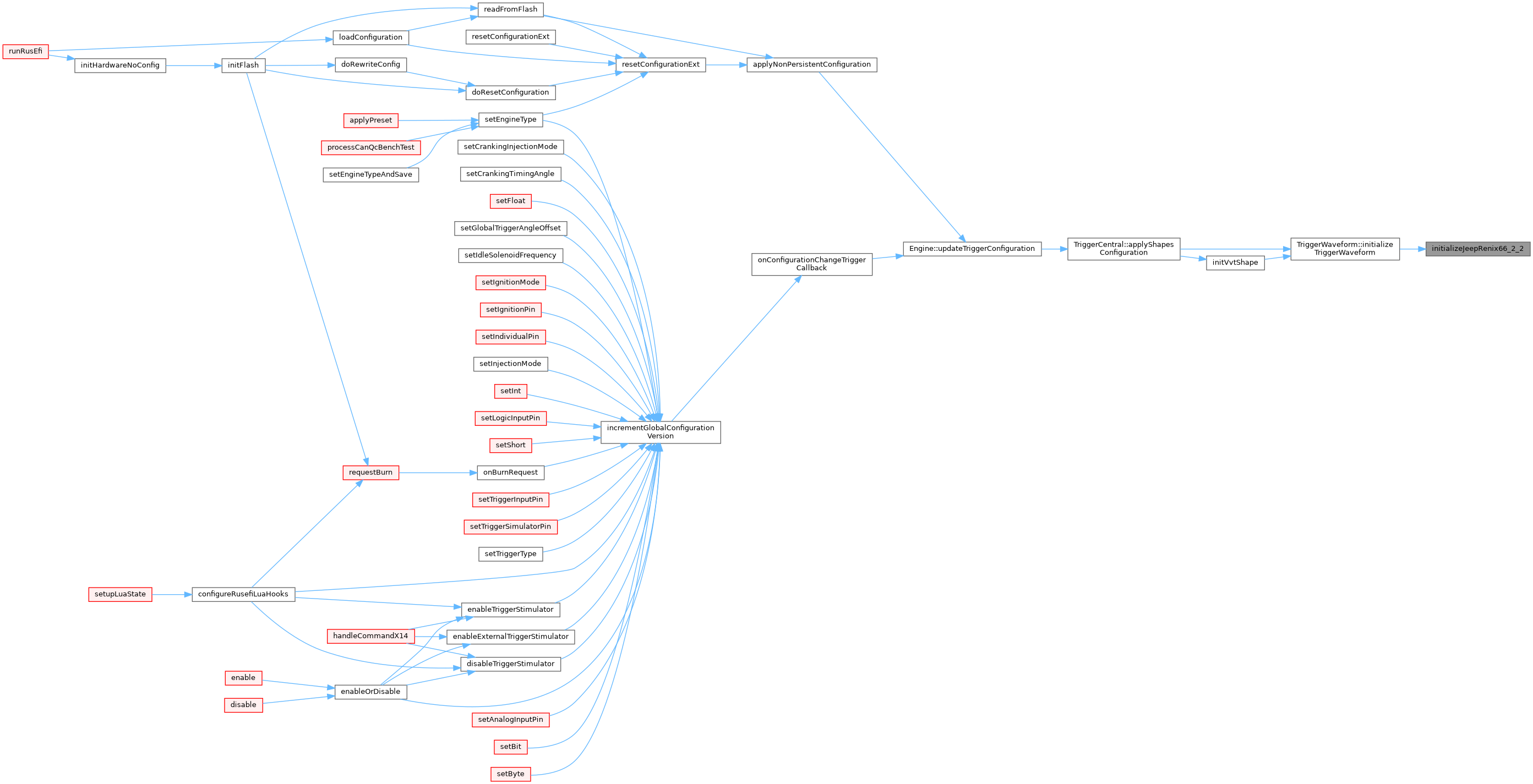
◆ initializeJeepRenix66_2_2()
| void initializeJeepRenix66_2_2 | ( | TriggerWaveform * | s | ) |
Definition at line 67 of file trigger_renix.cpp.
67 {
69
70 // 6 cylinder = 66 tooth wheel, missing 2 teeth in 3 spots
71 JeepRenix66_2_2(s, 3, 66, 2);
75}
void initialize(operation_mode_e operationMode, SyncEdge syncEdge)
Definition trigger_structure.cpp:65
void setTriggerSynchronizationGap3(int index, float syncRatioFrom, float syncRatioTo)
Definition trigger_structure.cpp:371
@ FOUR_STROKE_THREE_TIMES_CRANK_SENSOR
Definition rusefi_enums.h:290
@ RiseOnly
void JeepRenix66_2_2(TriggerWaveform *s, size_t halfCylinderCount, size_t totalWheel, size_t missing)
Definition trigger_renix.cpp:47
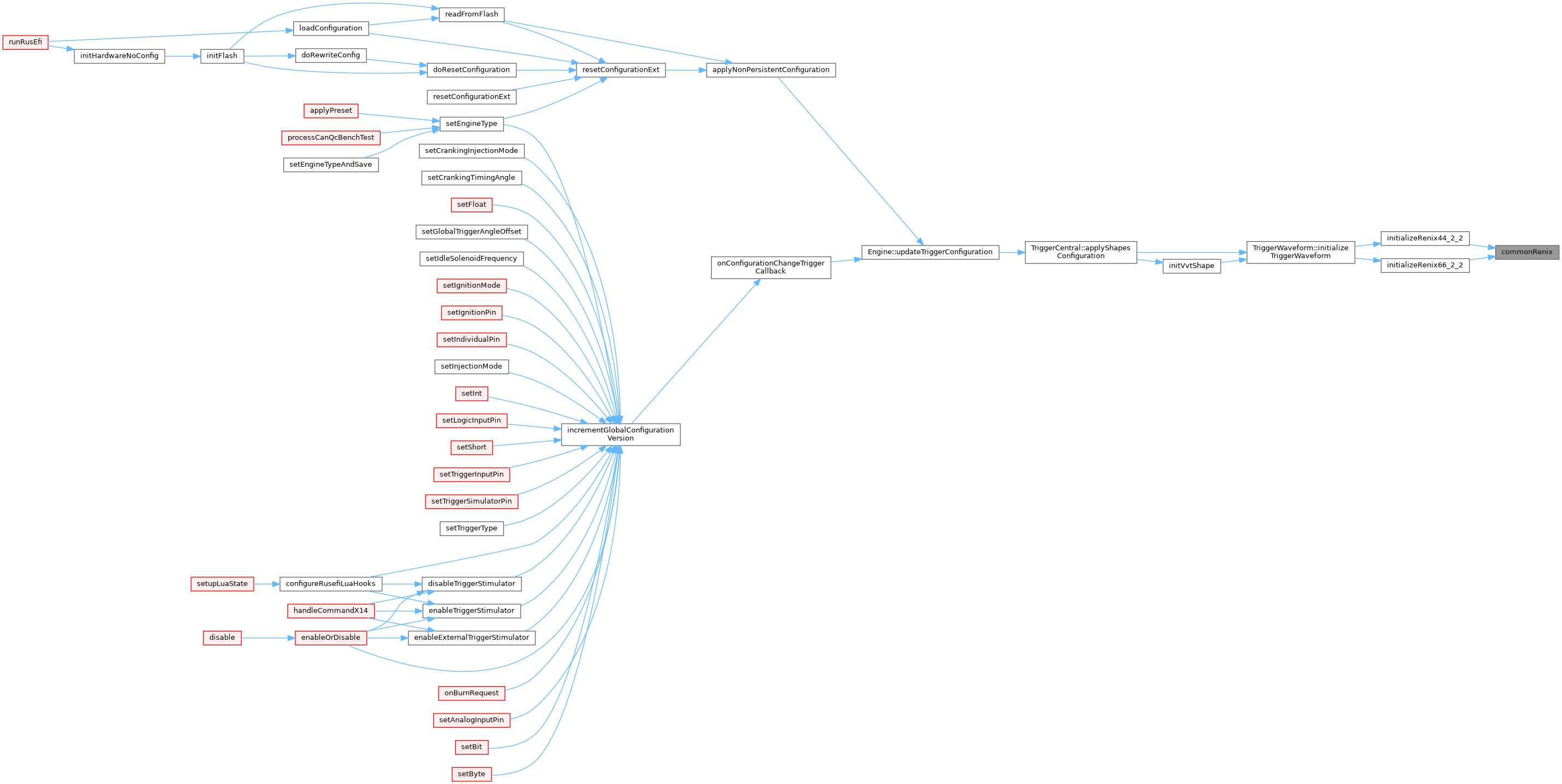
Referenced by TriggerWaveform::initializeTriggerWaveform().
Here is the call graph for this function:
Here is the caller graph for this function:
◆ initializeRenix44_2_2()
| void initializeRenix44_2_2 | ( | TriggerWaveform * | s | ) |
Definition at line 34 of file trigger_renix.cpp.
Referenced by TriggerWaveform::initializeTriggerWaveform().
Here is the call graph for this function:
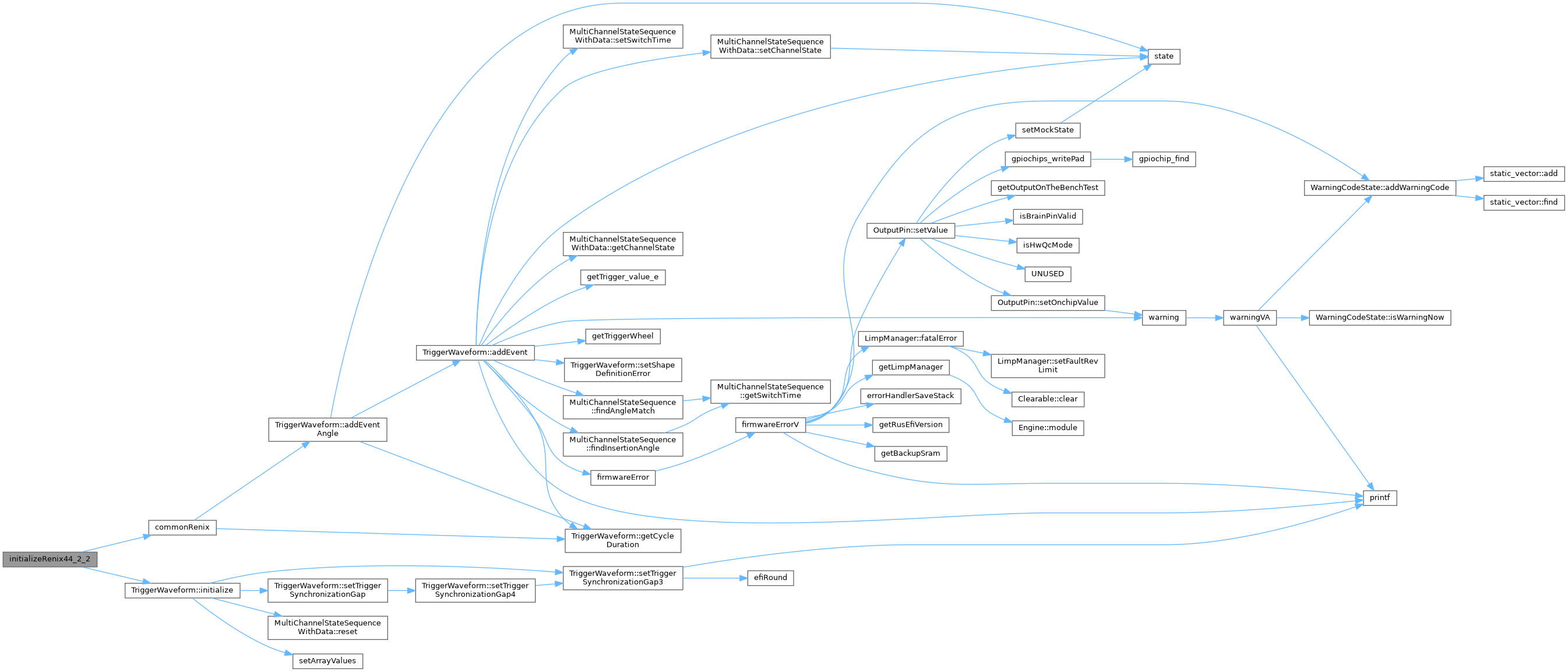
Here is the caller graph for this function:
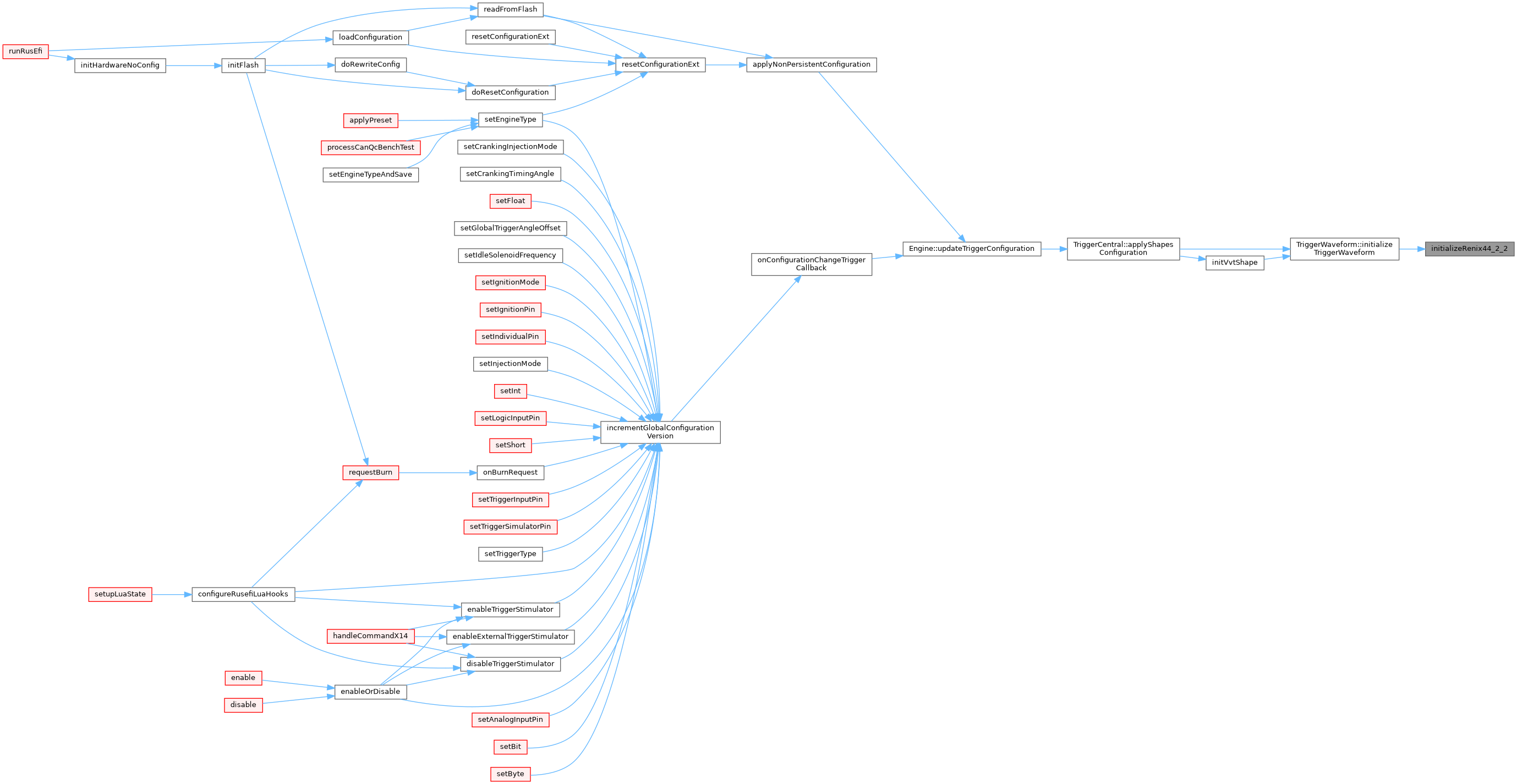
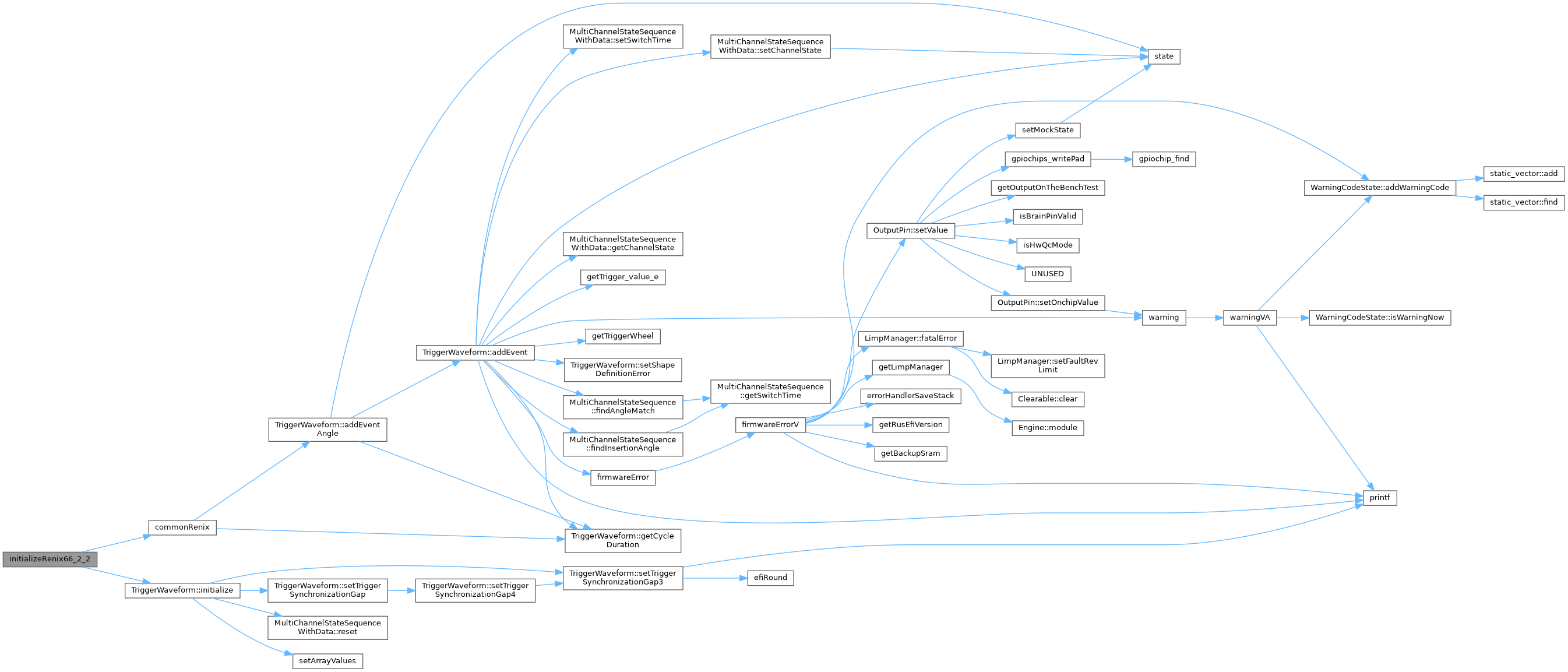
◆ initializeRenix66_2_2()
| void initializeRenix66_2_2 | ( | TriggerWaveform * | s | ) |
Definition at line 40 of file trigger_renix.cpp.
Referenced by TriggerWaveform::initializeTriggerWaveform().
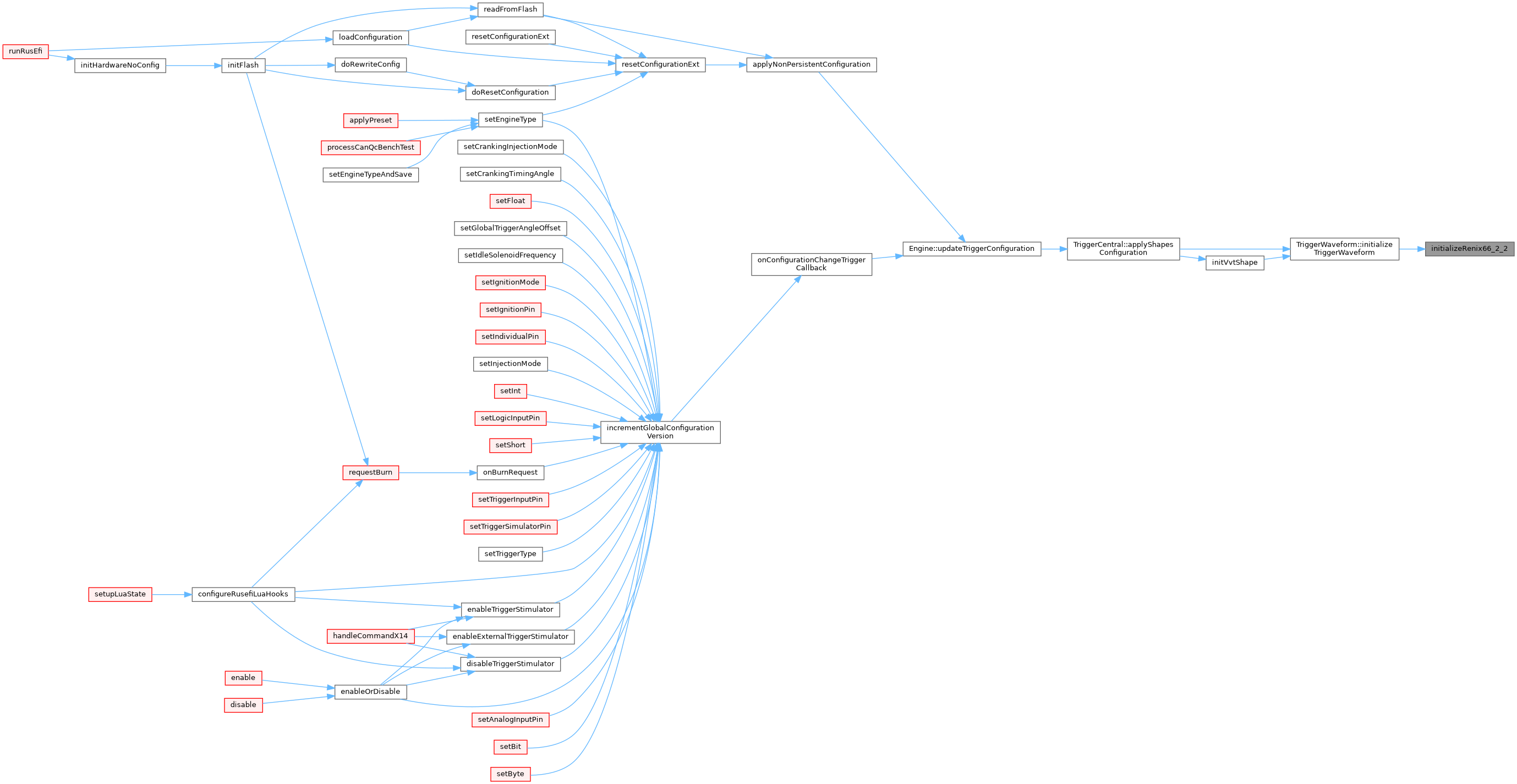
Here is the call graph for this function:
Here is the caller graph for this function:
◆ JeepRenix66_2_2()
| void JeepRenix66_2_2 | ( | TriggerWaveform * | s, |
| size_t | halfCylinderCount, | ||
| size_t | totalWheel, | ||
| size_t | missing | ||
| ) |
Definition at line 47 of file trigger_renix.cpp.
47 {
48
49 auto toothAngle = 360.0f / totalWheel;
50
51 auto patternTeeth = totalWheel / halfCylinderCount;
52 auto toothCount = patternTeeth - missing;
53
54 float currentAngle = missing * toothAngle;
55 for (size_t i = 0; i < toothCount; i++) {
56 currentAngle += toothAngle;
58 if (i==toothCount-1) { // last event at 120
60 } else {
62 }
63 }
64}
Referenced by initializeJeepRenix66_2_2().
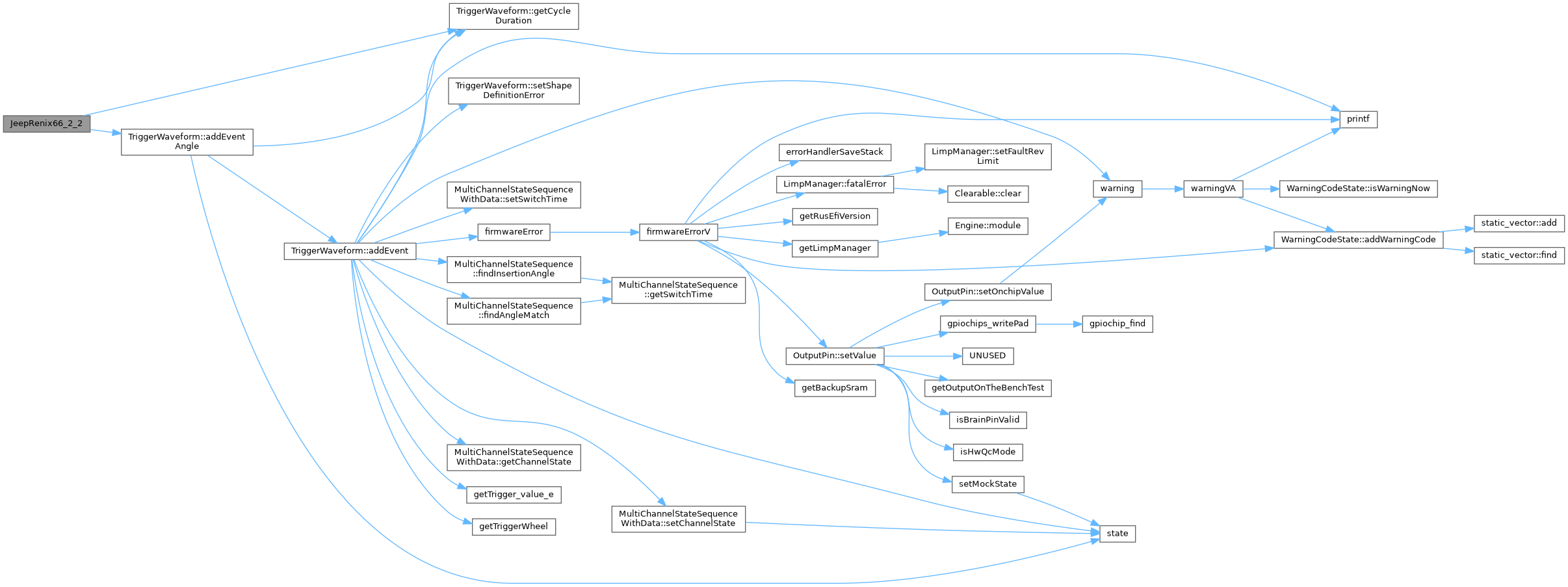
Here is the call graph for this function:
Here is the caller graph for this function: