Functions | |
| void | configureFiatIAQ_P8 (TriggerWaveform *s) |
| void | configureDaihatsu3cyl (TriggerWaveform *s) |
| void | configureDaihatsu4cyl (TriggerWaveform *s) |
| void | configureFordPip (TriggerWaveform *s) |
| void | configureFordST170 (TriggerWaveform *s) |
| void | configureTriTach (TriggerWaveform *s) |
| void | configureBarra3plus1cam (TriggerWaveform *s) |
| void | configureBenelli (TriggerWaveform *s) |
| void | configure60degSingleTooth (TriggerWaveform *s) |
| Configure trigger as Sovek or Saruman ignition. | |
| void | configureArcticCat (TriggerWaveform *s) |
Function Documentation
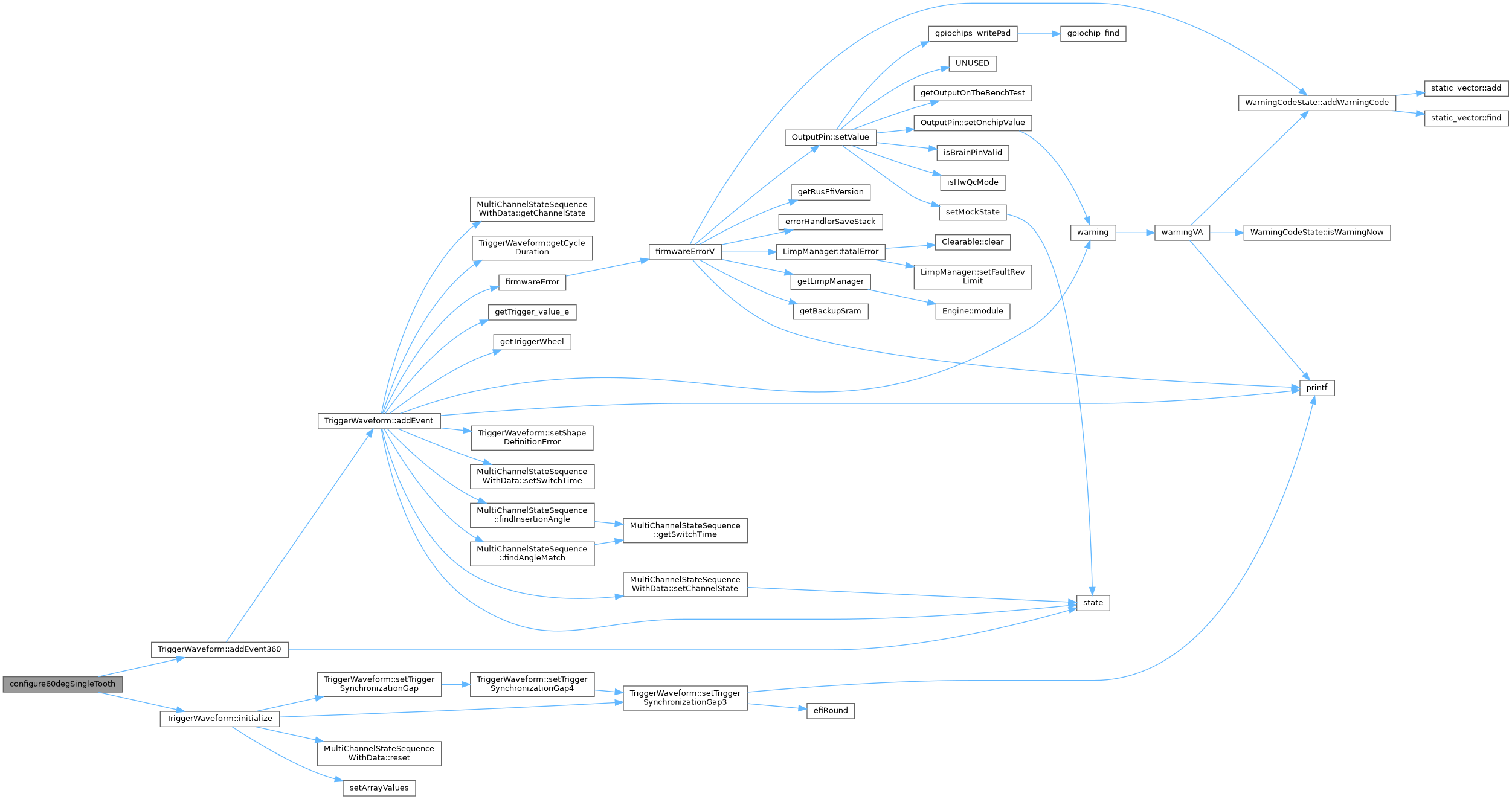
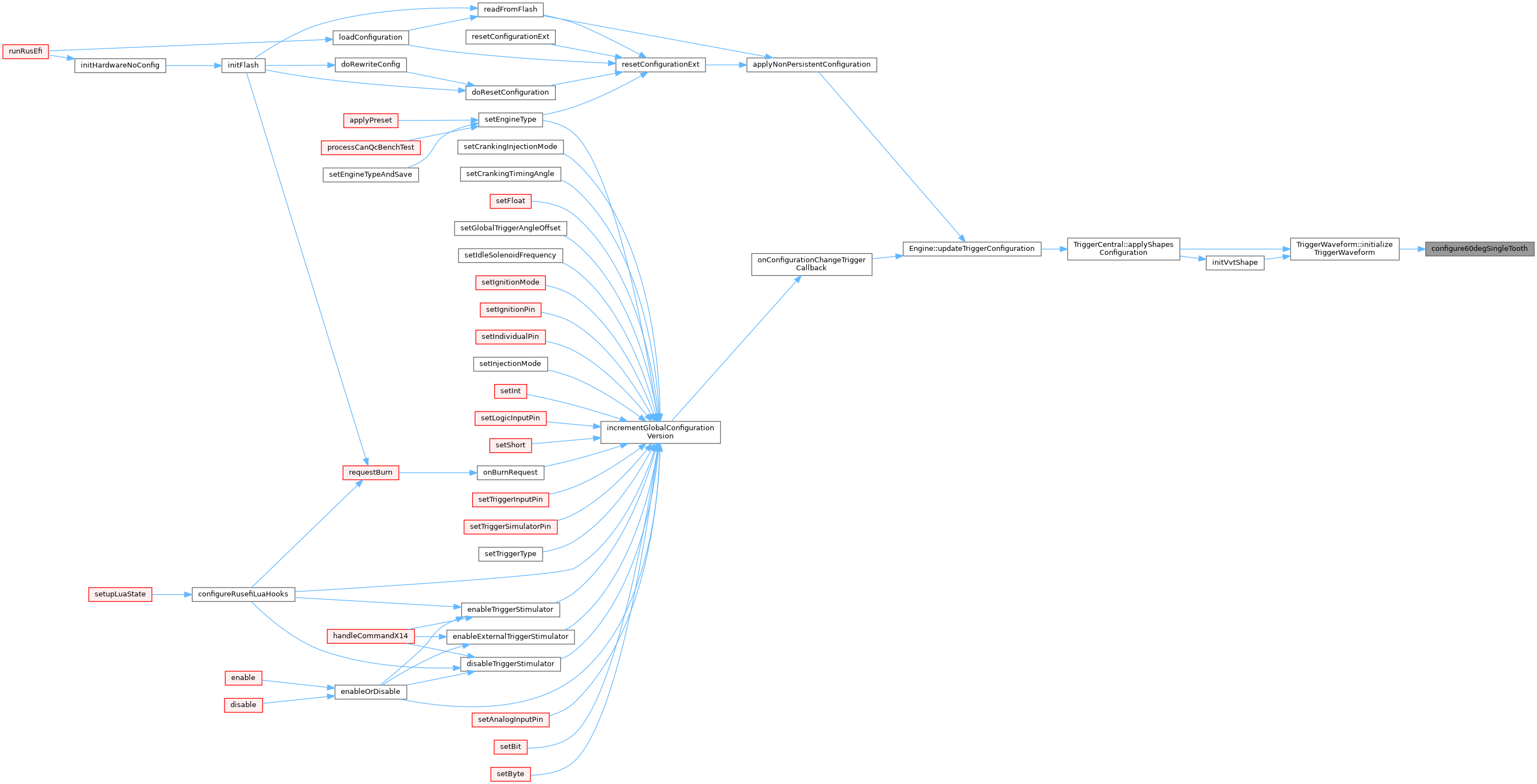
◆ configure60degSingleTooth()
| void configure60degSingleTooth | ( | TriggerWaveform * | s | ) |
Configure trigger as Sovek or Saruman ignition.
- Parameters
-
s Trigger waveform visitor to config
- Todo:
- My approach was to utilize Both especially for single tooth and manual kikstarter, to be ready on both sides of blind. But unfortuneally, my experiments show me the Trigger can't become syncronized by 'last' and folowed 'first' events only. Also I observe phase-aligment mehanism is trying to consume a longer side of trigger as latest before TDC. I wish to setup SyncEdge::Both for my TT_60DEG_TOOTH after this case of scenario become work well. For now, Rise work well for my 60 degree trigger and both edges phase sync work as mush as expected for my engine startup.
Definition at line 179 of file trigger_misc.cpp.
Referenced by TriggerWaveform::initializeTriggerWaveform().
◆ configureArcticCat()
| void configureArcticCat | ( | TriggerWaveform * | s | ) |
Definition at line 203 of file trigger_misc.cpp.
Referenced by TriggerWaveform::initializeTriggerWaveform().


◆ configureBarra3plus1cam()
| void configureBarra3plus1cam | ( | TriggerWaveform * | s | ) |
Definition at line 129 of file trigger_misc.cpp.
Referenced by TriggerWaveform::initializeTriggerWaveform().


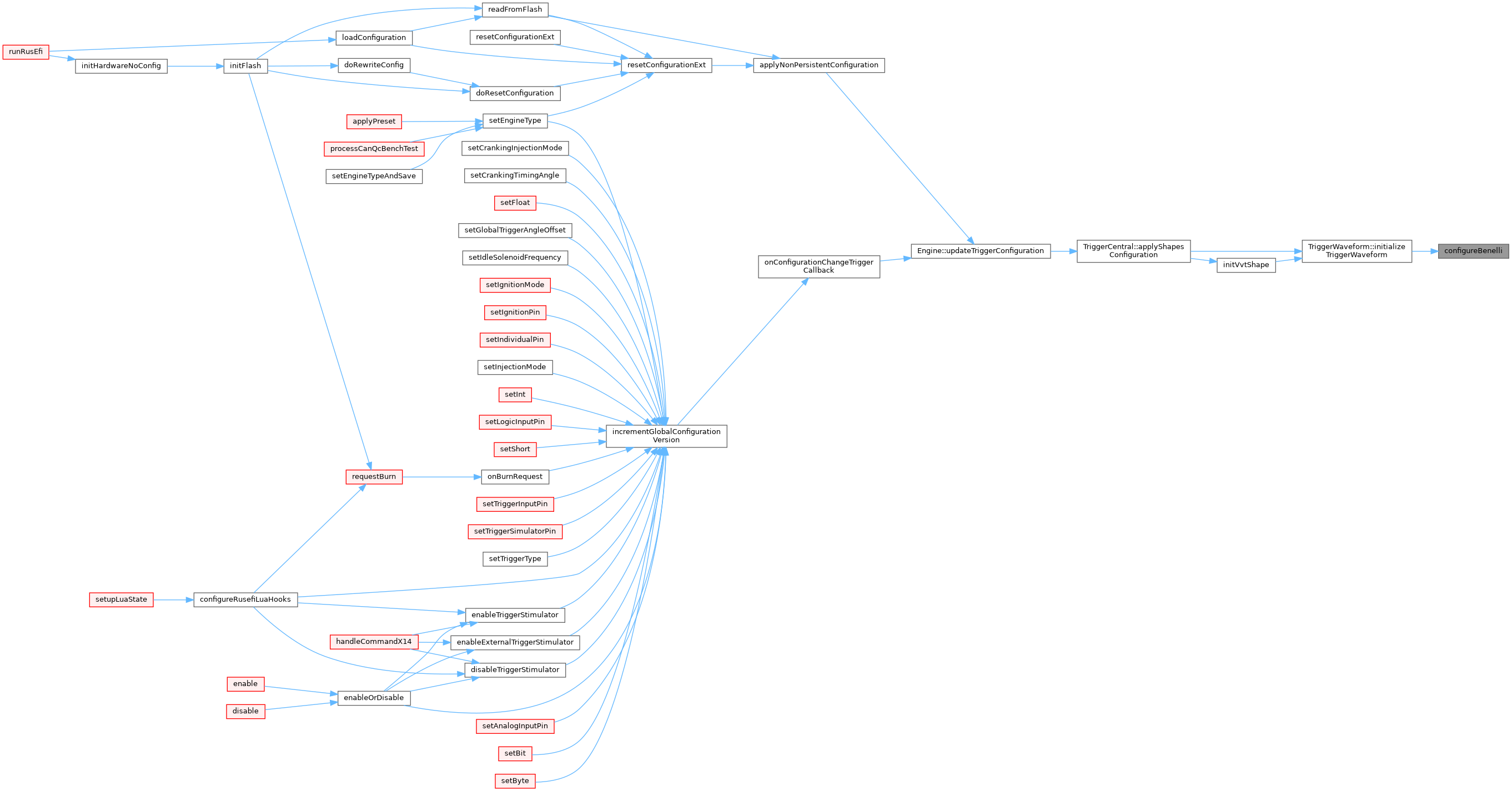
◆ configureBenelli()
| void configureBenelli | ( | TriggerWaveform * | s | ) |
Definition at line 160 of file trigger_misc.cpp.
Referenced by TriggerWaveform::initializeTriggerWaveform().

◆ configureDaihatsu3cyl()
| void configureDaihatsu3cyl | ( | TriggerWaveform * | s | ) |
Definition at line 118 of file trigger_misc.cpp.
Referenced by TriggerWaveform::initializeTriggerWaveform().


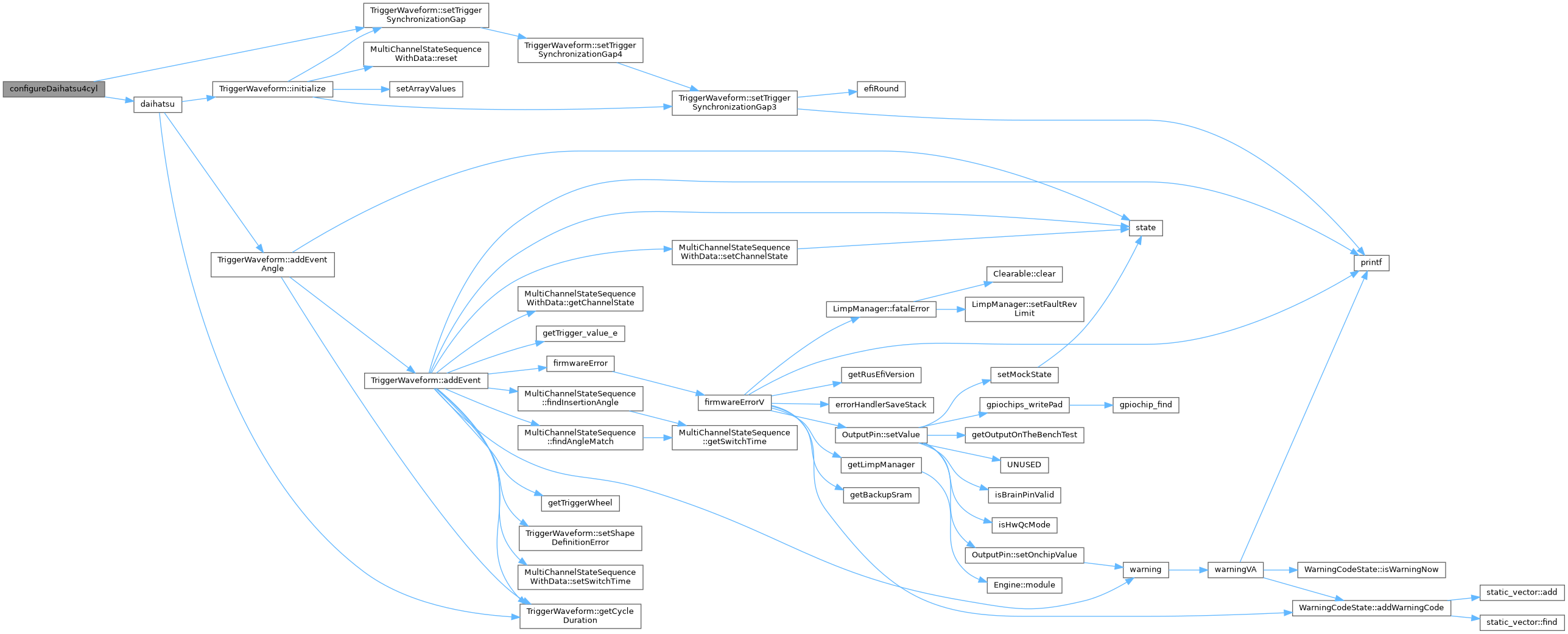
◆ configureDaihatsu4cyl()
| void configureDaihatsu4cyl | ( | TriggerWaveform * | s | ) |
Definition at line 124 of file trigger_misc.cpp.
Referenced by TriggerWaveform::initializeTriggerWaveform().

◆ configureFiatIAQ_P8()
| void configureFiatIAQ_P8 | ( | TriggerWaveform * | s | ) |
Definition at line 14 of file trigger_misc.cpp.
Referenced by TriggerWaveform::initializeTriggerWaveform().


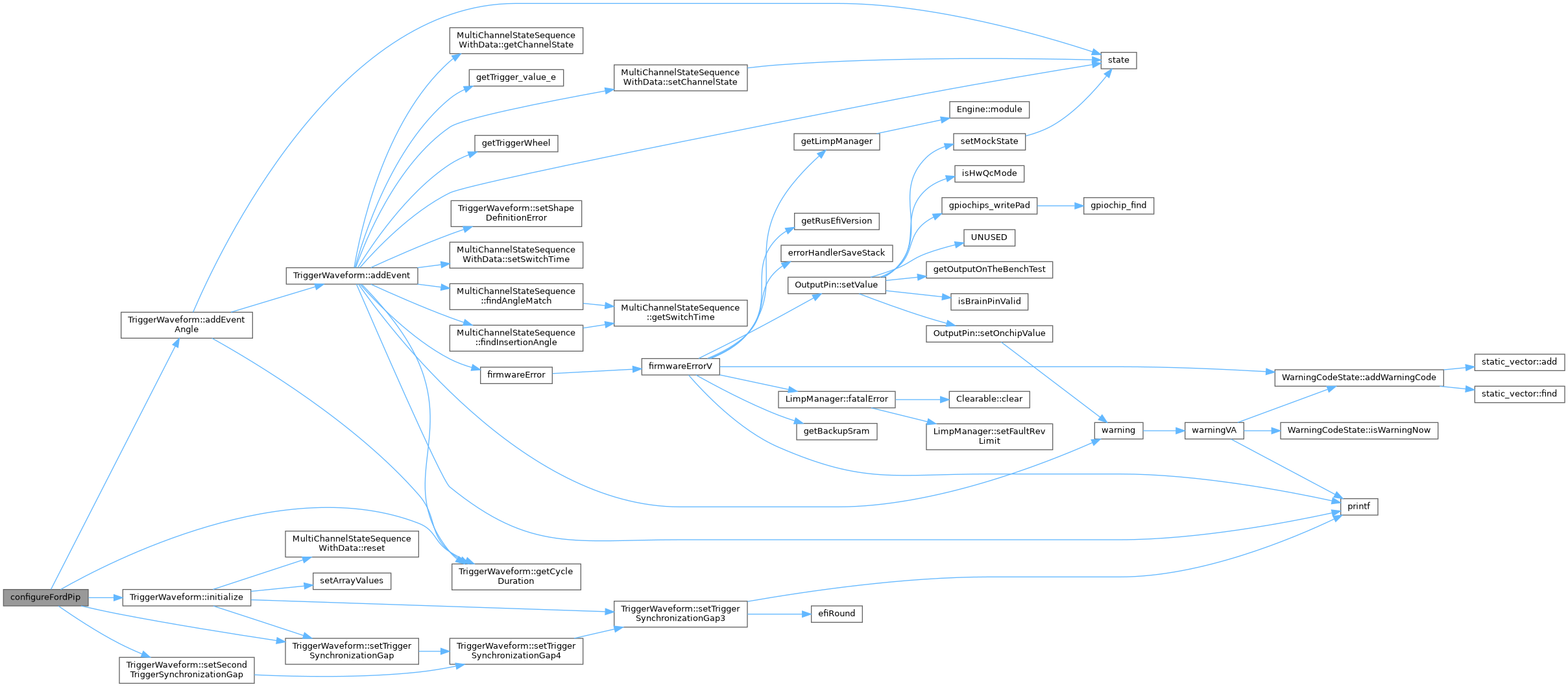
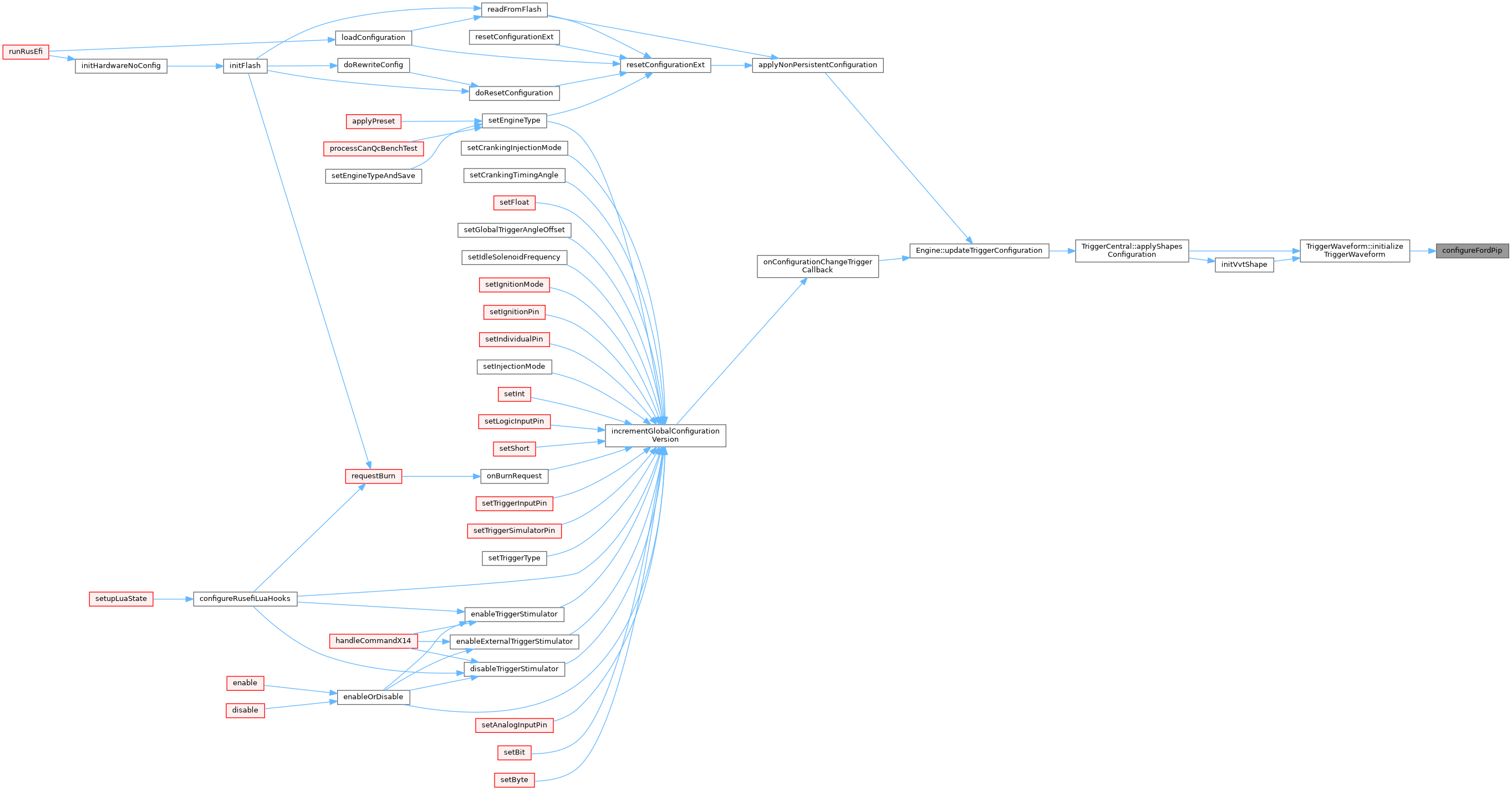
◆ configureFordPip()
| void configureFordPip | ( | TriggerWaveform * | s | ) |
based on https://fordsix.com/threads/understanding-standard-and-signature-pip-thick-film-ignition.81515/ based on https://www.w8ji.com/distributor_stabbing.htm
sensor is mounted on distributor but trigger shape is defined in engine cycle angles
Definition at line 58 of file trigger_misc.cpp.
Referenced by TriggerWaveform::initializeTriggerWaveform().
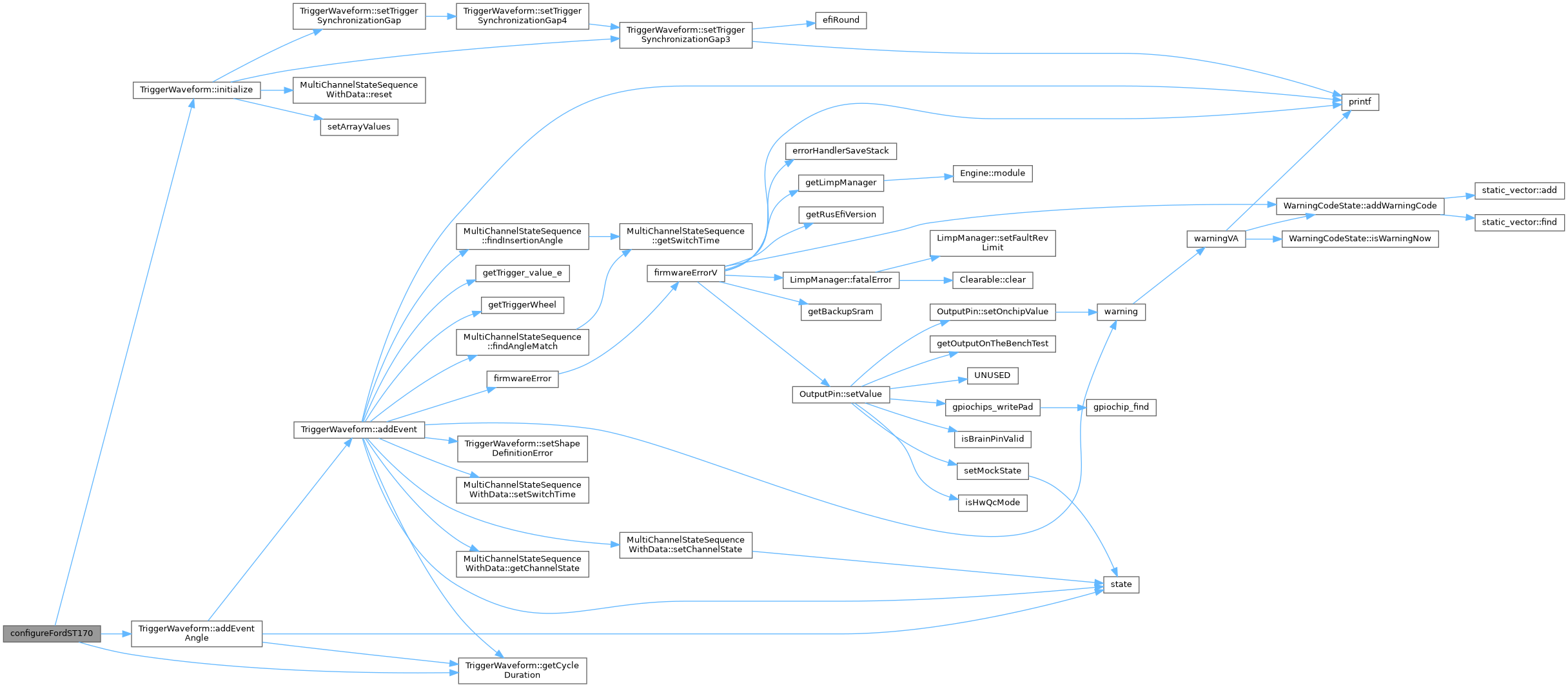
◆ configureFordST170()
| void configureFordST170 | ( | TriggerWaveform * | s | ) |
Definition at line 81 of file trigger_misc.cpp.
Referenced by TriggerWaveform::initializeTriggerWaveform().

◆ configureTriTach()
| void configureTriTach | ( | TriggerWaveform * | s | ) |
Definition at line 29 of file trigger_misc.cpp.
Referenced by TriggerWaveform::initializeTriggerWaveform().

