Detailed Description
- Date
- Mar 28, 2014
Definition in file trigger_gm.cpp.
Functions | |
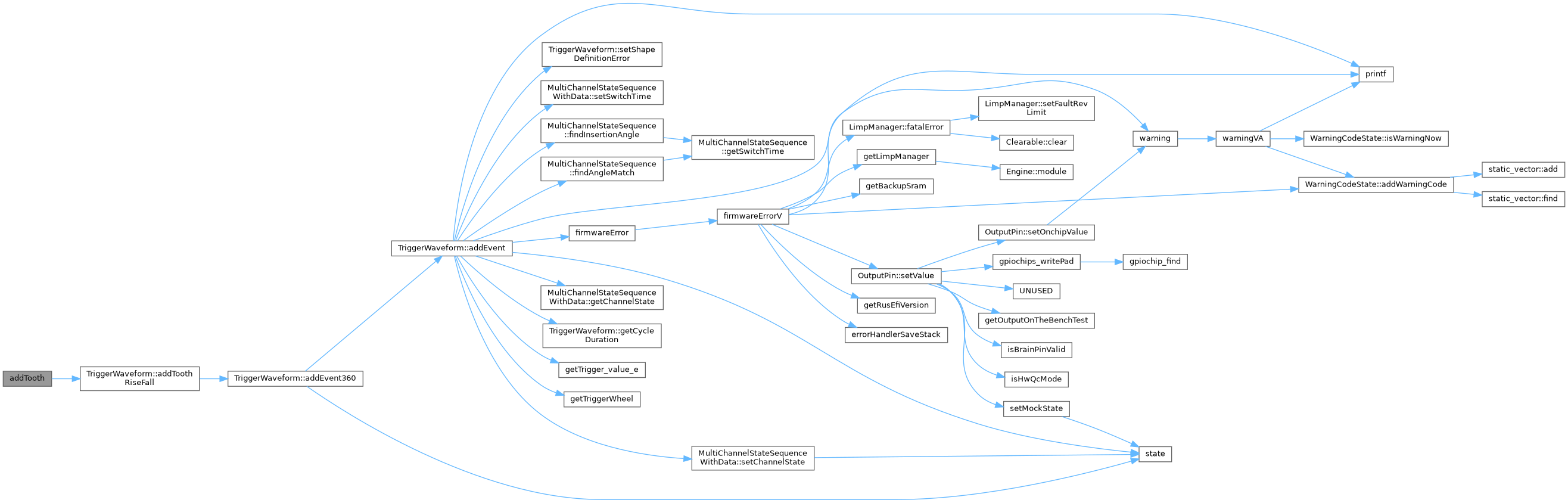
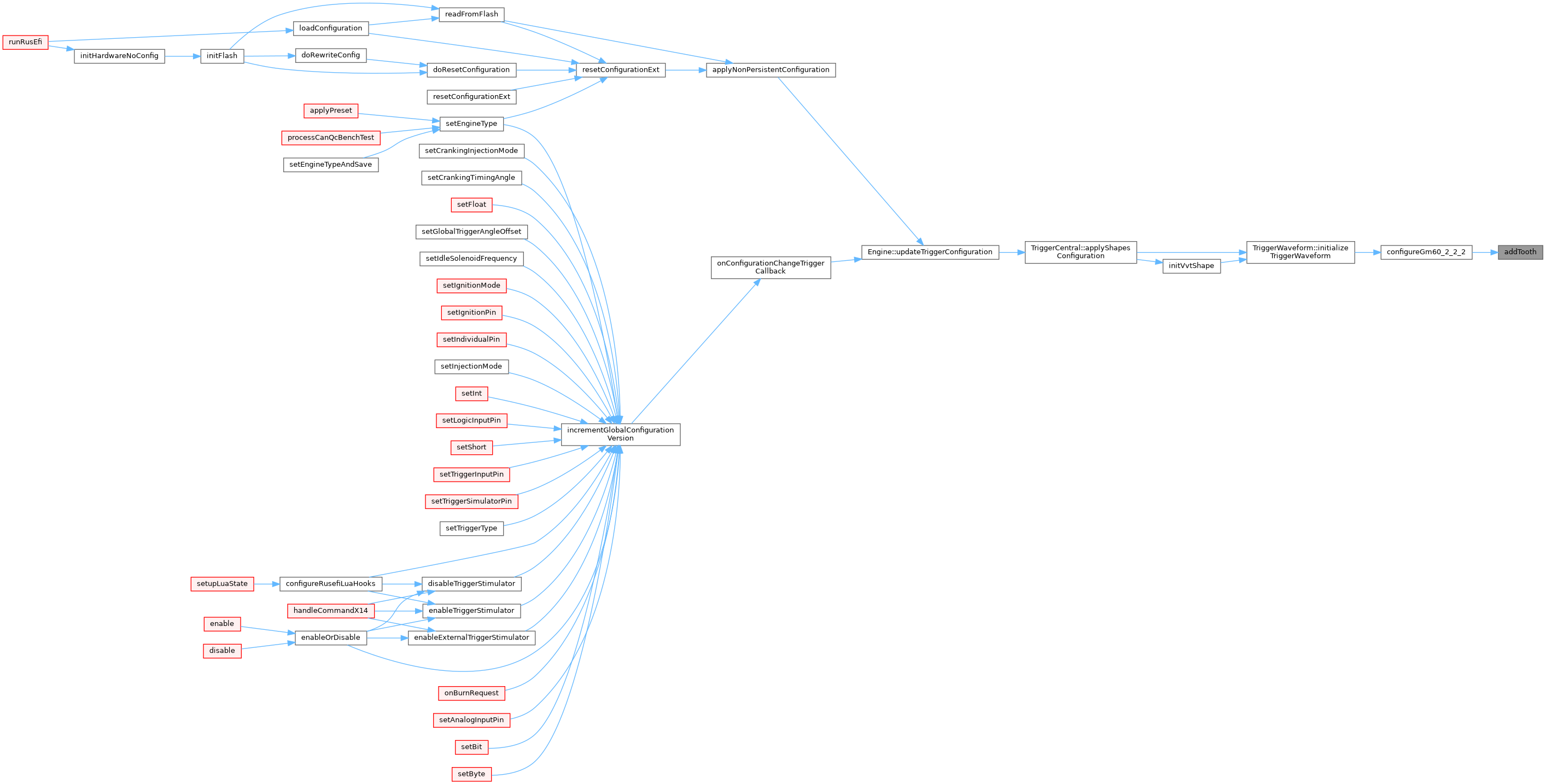
| static float | addTooth (float offset, TriggerWaveform *s) |
| void | configureGm60_2_2_2 (TriggerWaveform *s) |
| void | configureGmTriggerWaveform (TriggerWaveform *s) |
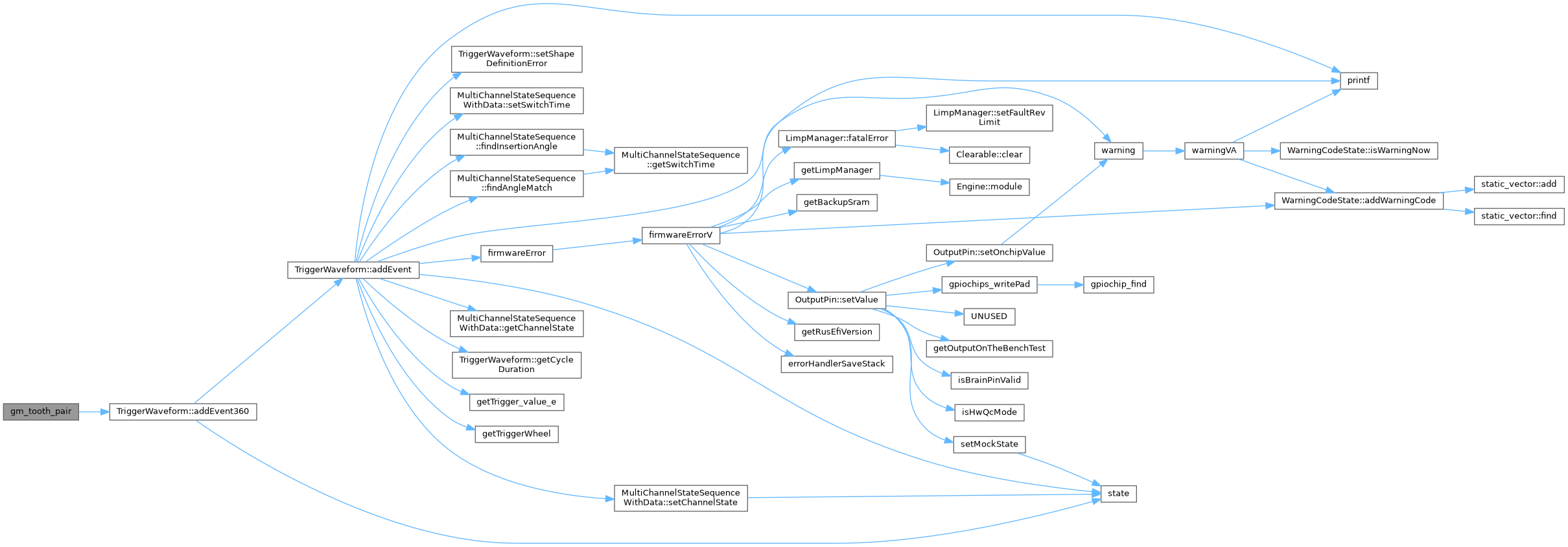
| static int | gm_tooth_pair (float startAngle, bool isShortLong, TriggerWaveform *s, float shortToothWidth) |
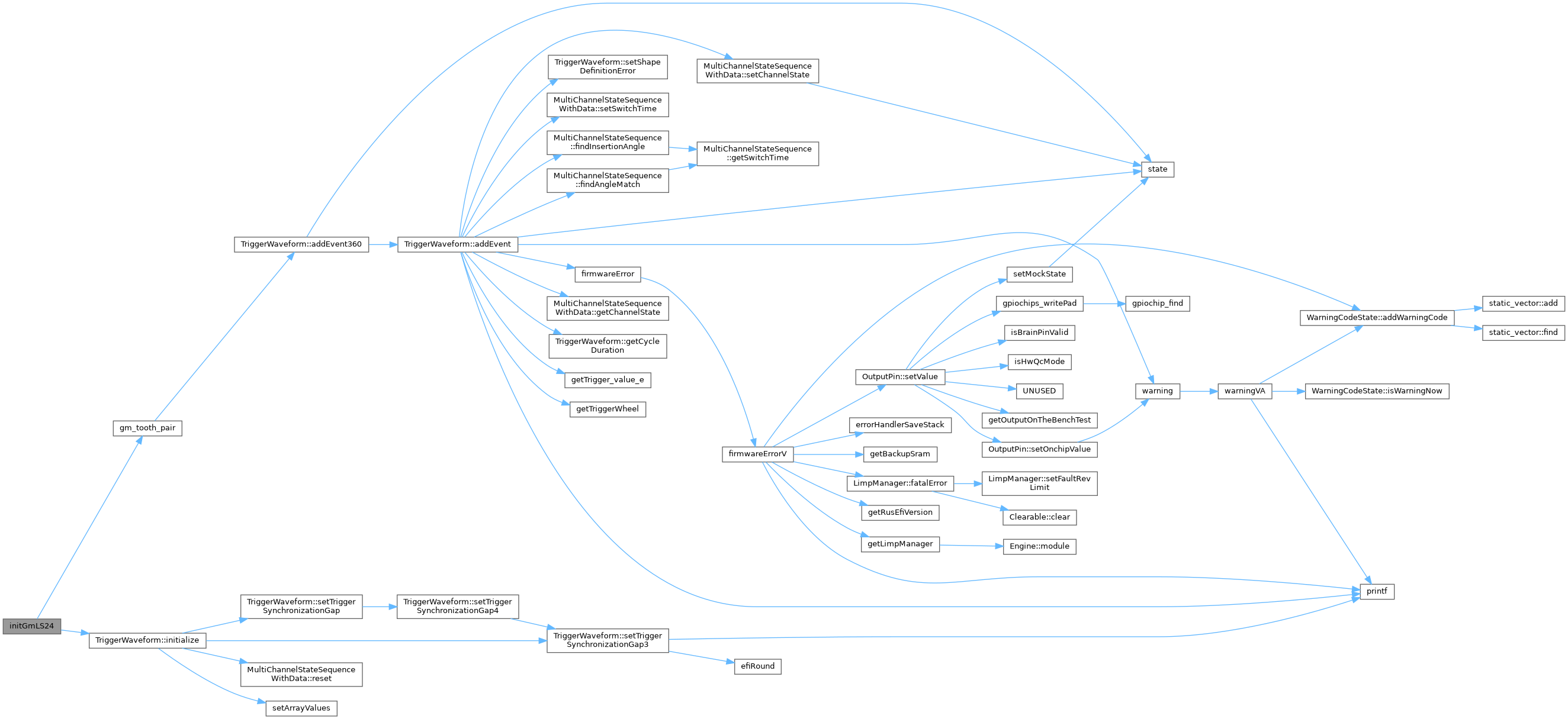
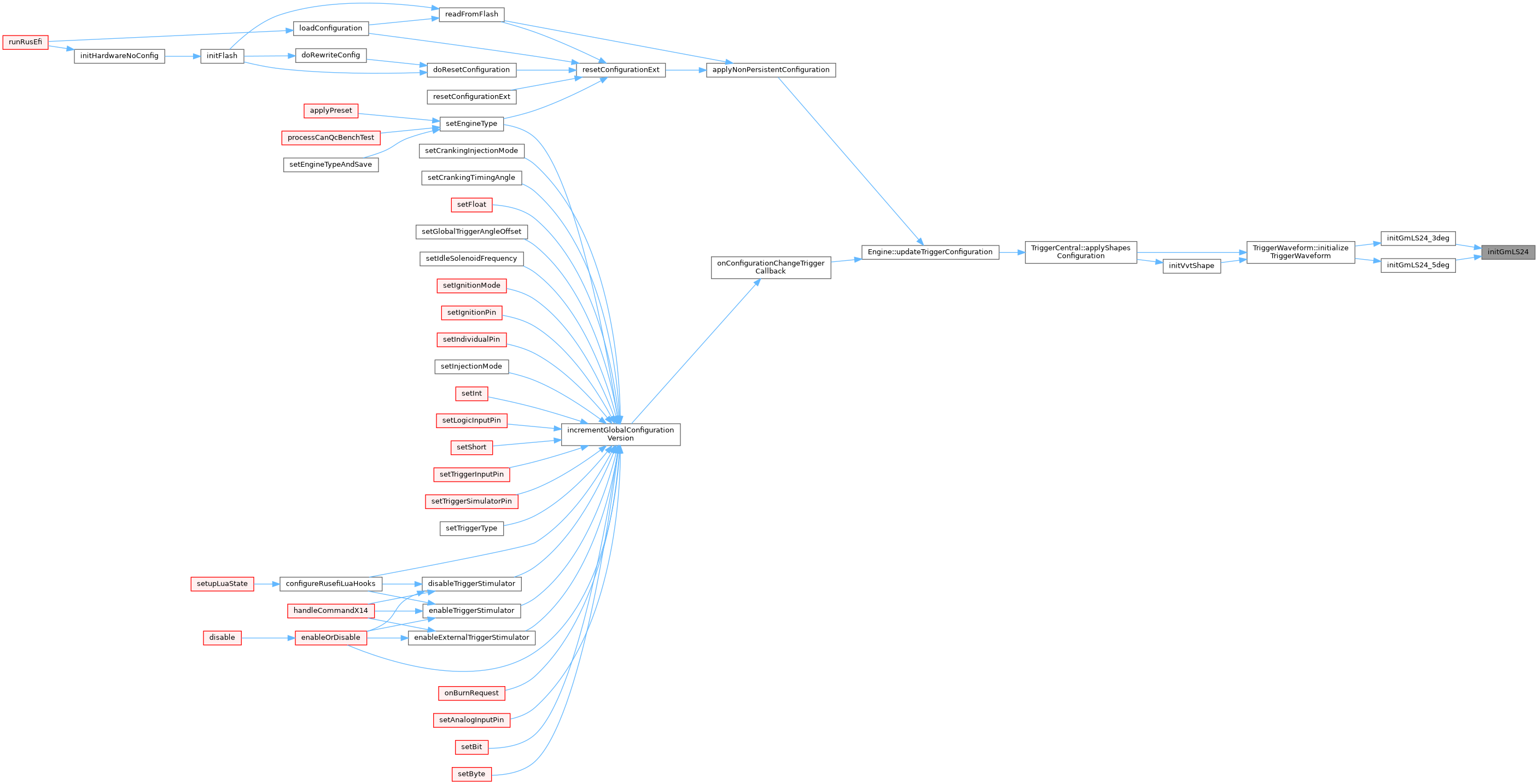
| static void | initGmLS24 (TriggerWaveform *s, float shortToothWidth) |
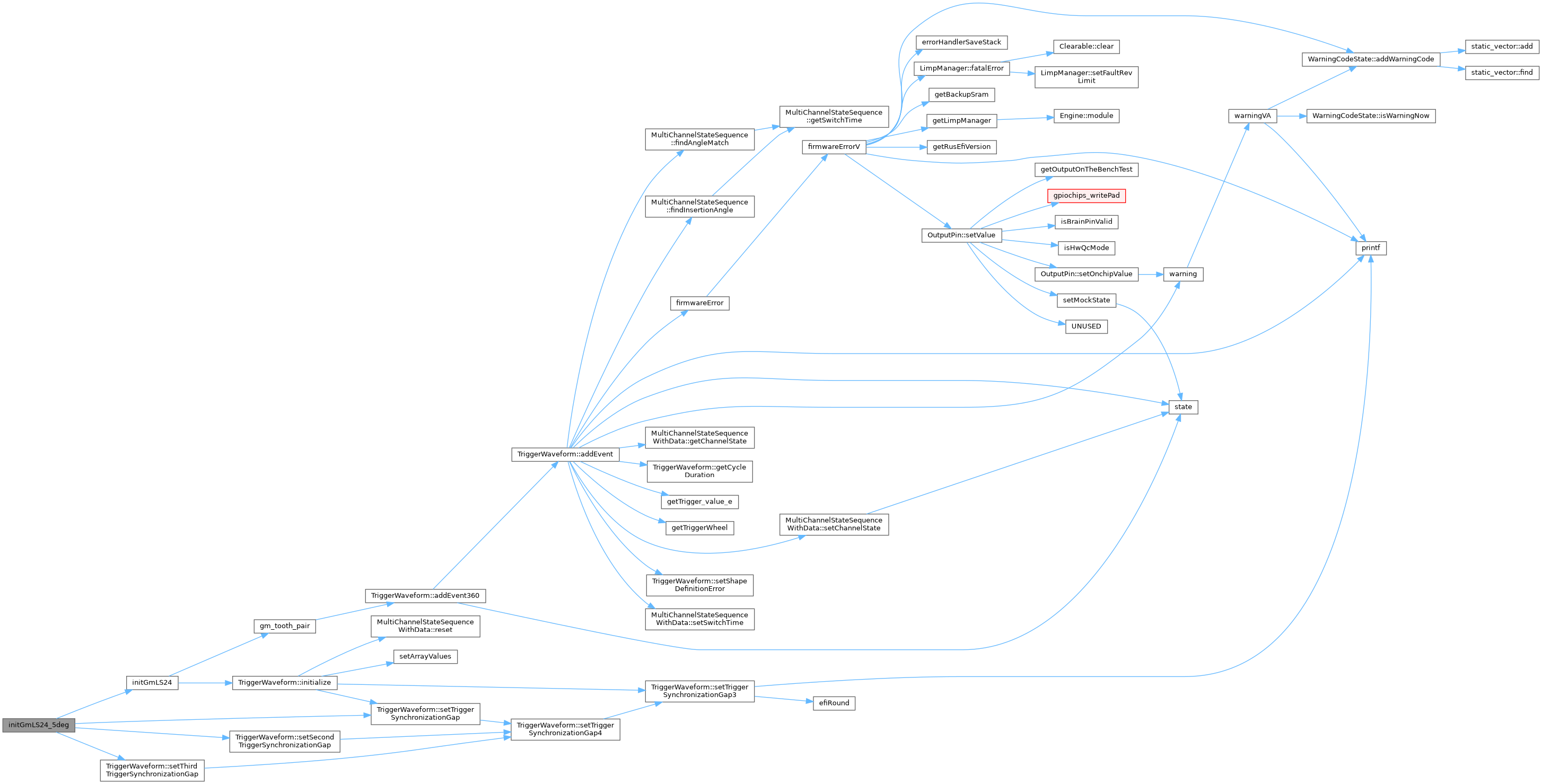
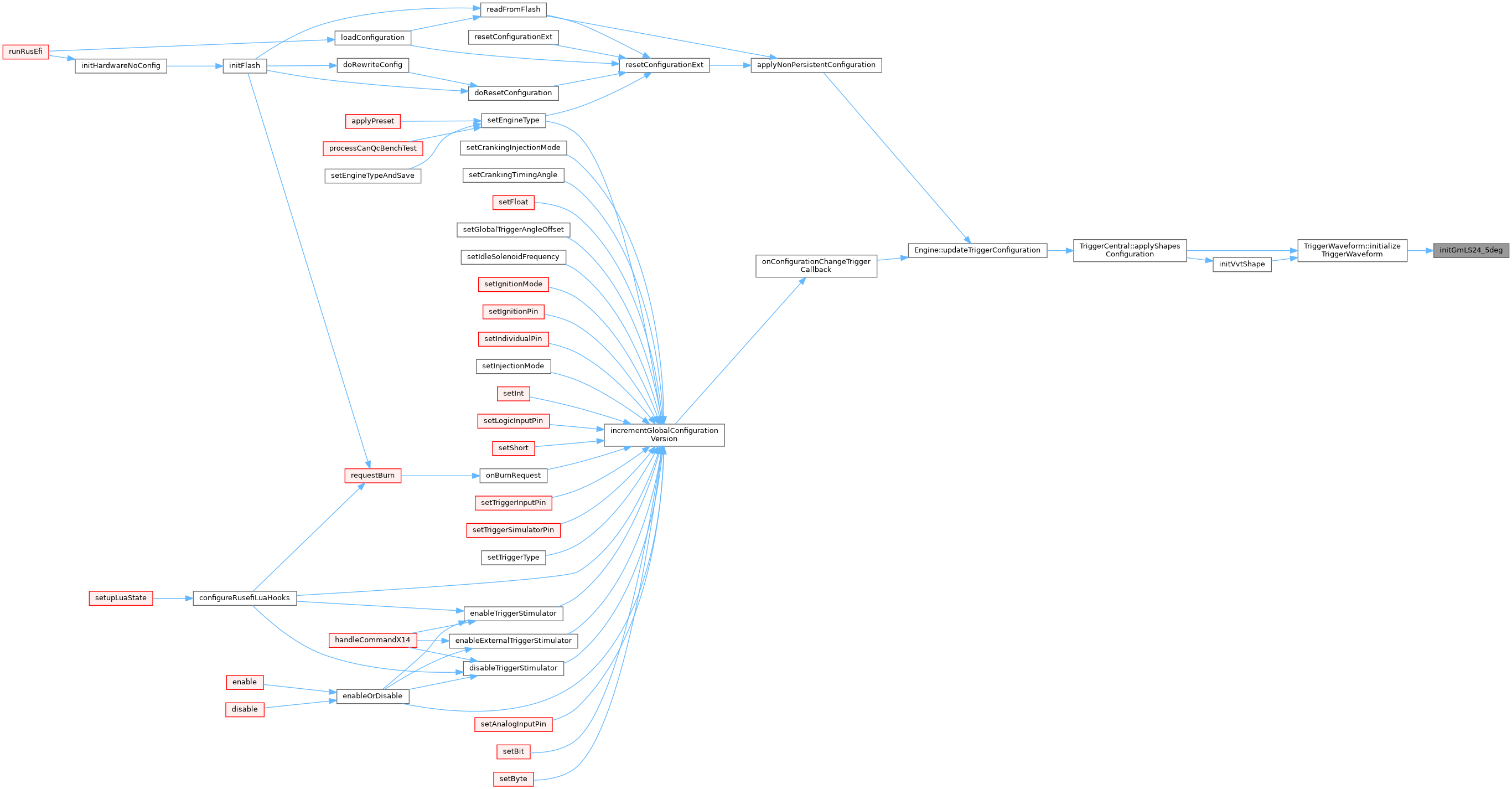
| void | initGmLS24_5deg (TriggerWaveform *s) |
| void | initGmLS24_3deg (TriggerWaveform *s) |
Function Documentation
◆ addTooth()
|
static |
Definition at line 14 of file trigger_gm.cpp.
Referenced by configureGm60_2_2_2().
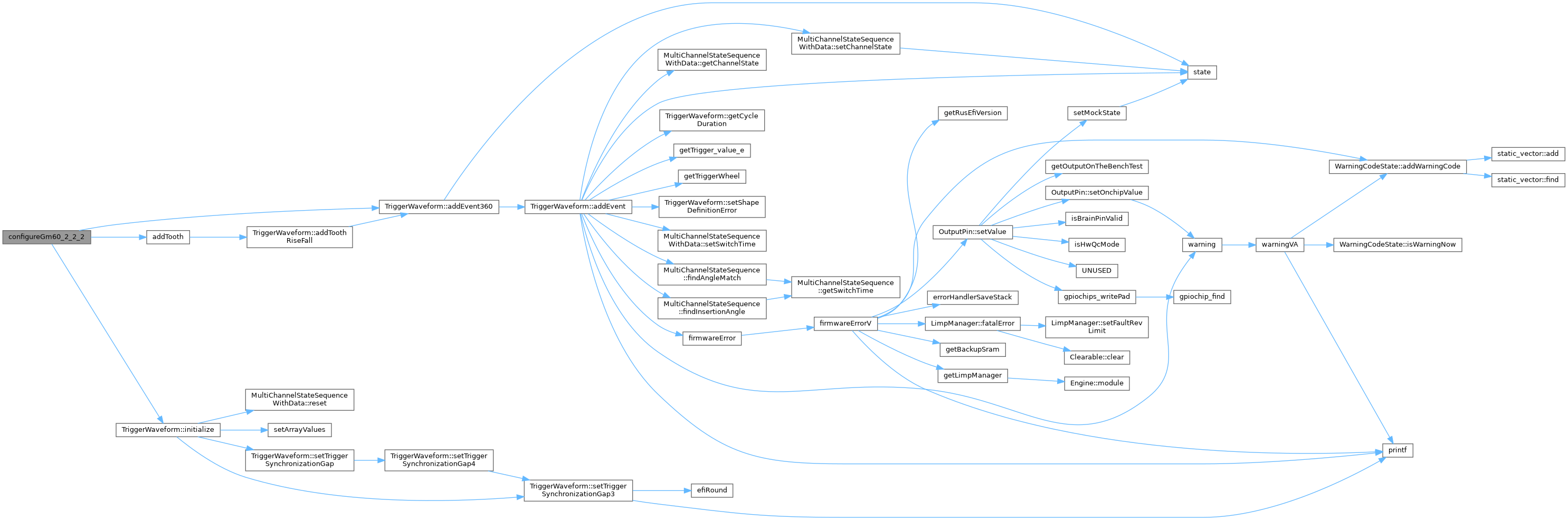
◆ configureGm60_2_2_2()
| void configureGm60_2_2_2 | ( | TriggerWaveform * | s | ) |
https://github.com/rusefi/rusefi/issues/2264 GM/Daewoo Distributor on the F8CV
Definition at line 23 of file trigger_gm.cpp.
Referenced by TriggerWaveform::initializeTriggerWaveform().
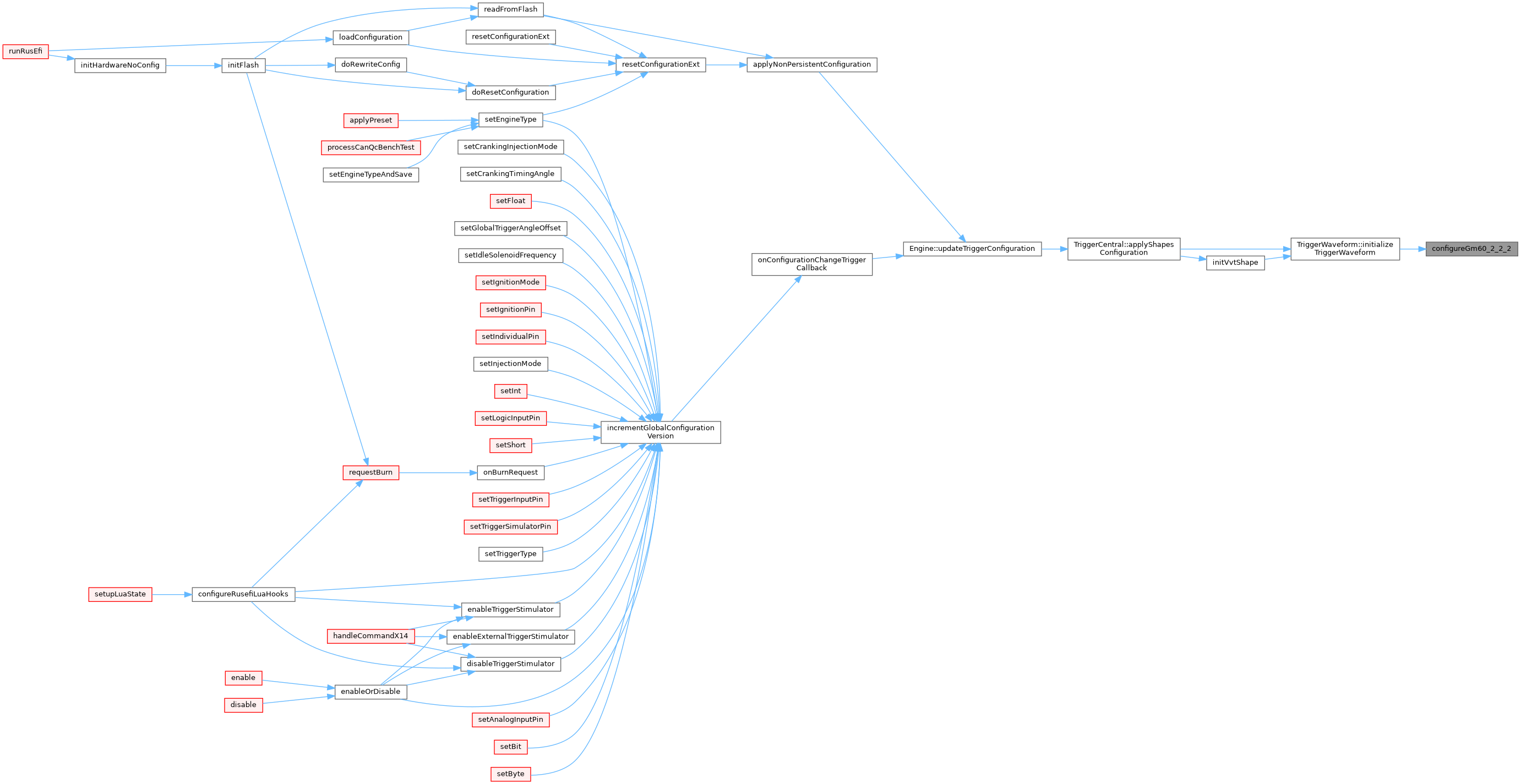
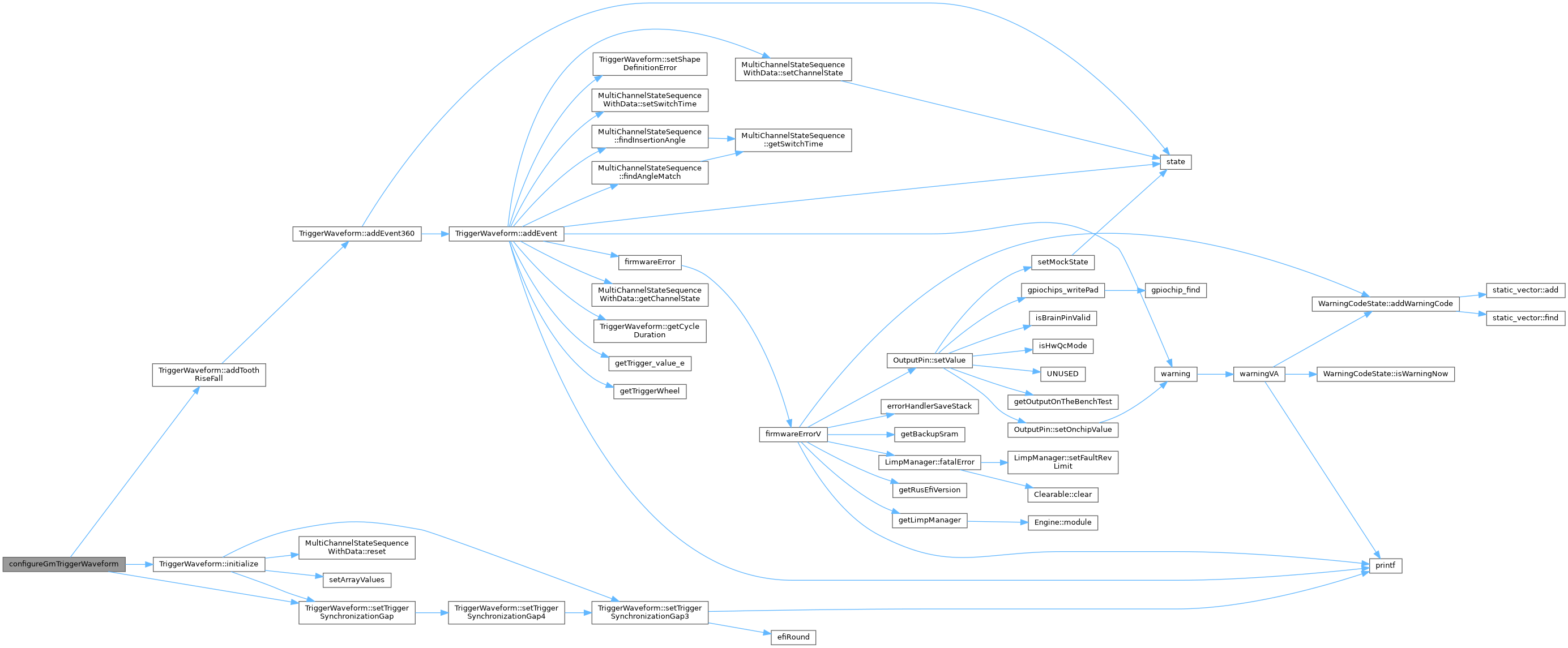
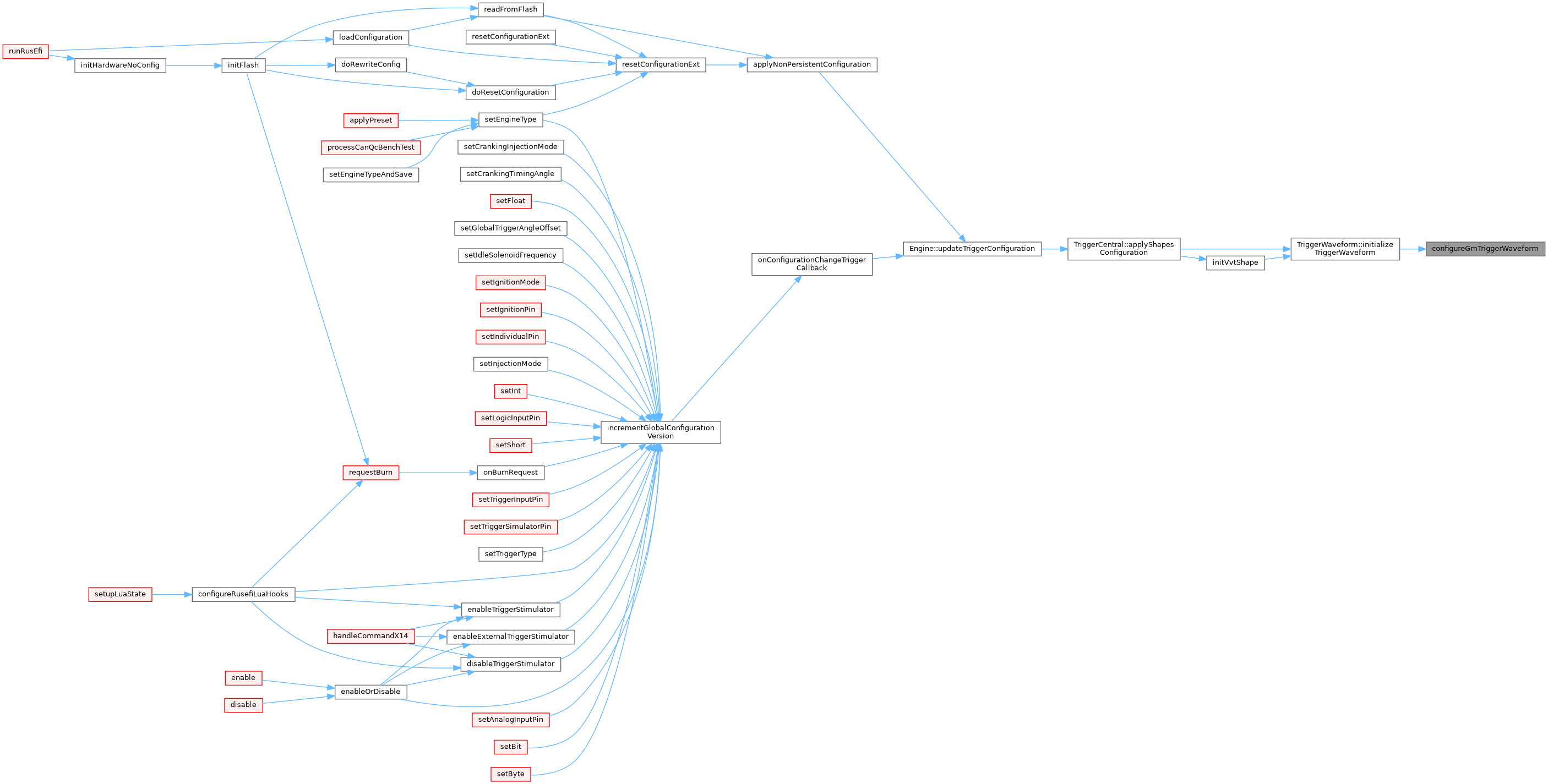
◆ configureGmTriggerWaveform()
| void configureGmTriggerWaveform | ( | TriggerWaveform * | s | ) |
Definition at line 60 of file trigger_gm.cpp.
Referenced by TriggerWaveform::initializeTriggerWaveform().
◆ gm_tooth_pair()
|
static |
Definition at line 82 of file trigger_gm.cpp.
Referenced by initGmLS24().
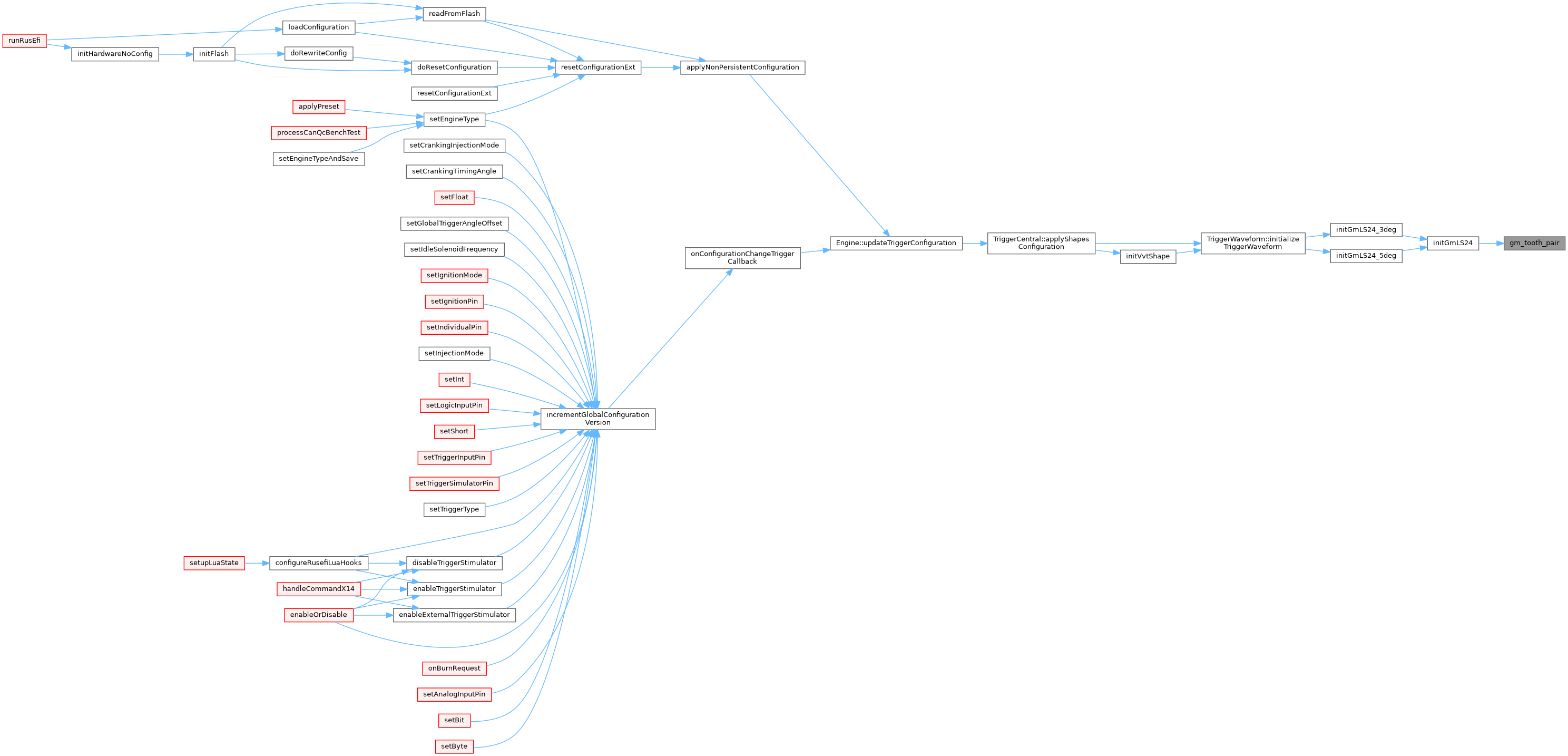
◆ initGmLS24()
|
static |
TT_GM_24x_5 and TT_GM_24x_3 https://www.mediafire.com/?40mfgeoe4ctti http://www.ls1gto.com/forums/archive/index.php/t-190549.htm http://www.ls2.com/forums/showthread.php/834483-LS-Timing-Reluctor-Wheels-Explained
based on data in https://rusefi.com/forum/viewtopic.php?f=3&t=936&p=30303#p30285
Definition at line 102 of file trigger_gm.cpp.
Referenced by initGmLS24_3deg(), and initGmLS24_5deg().
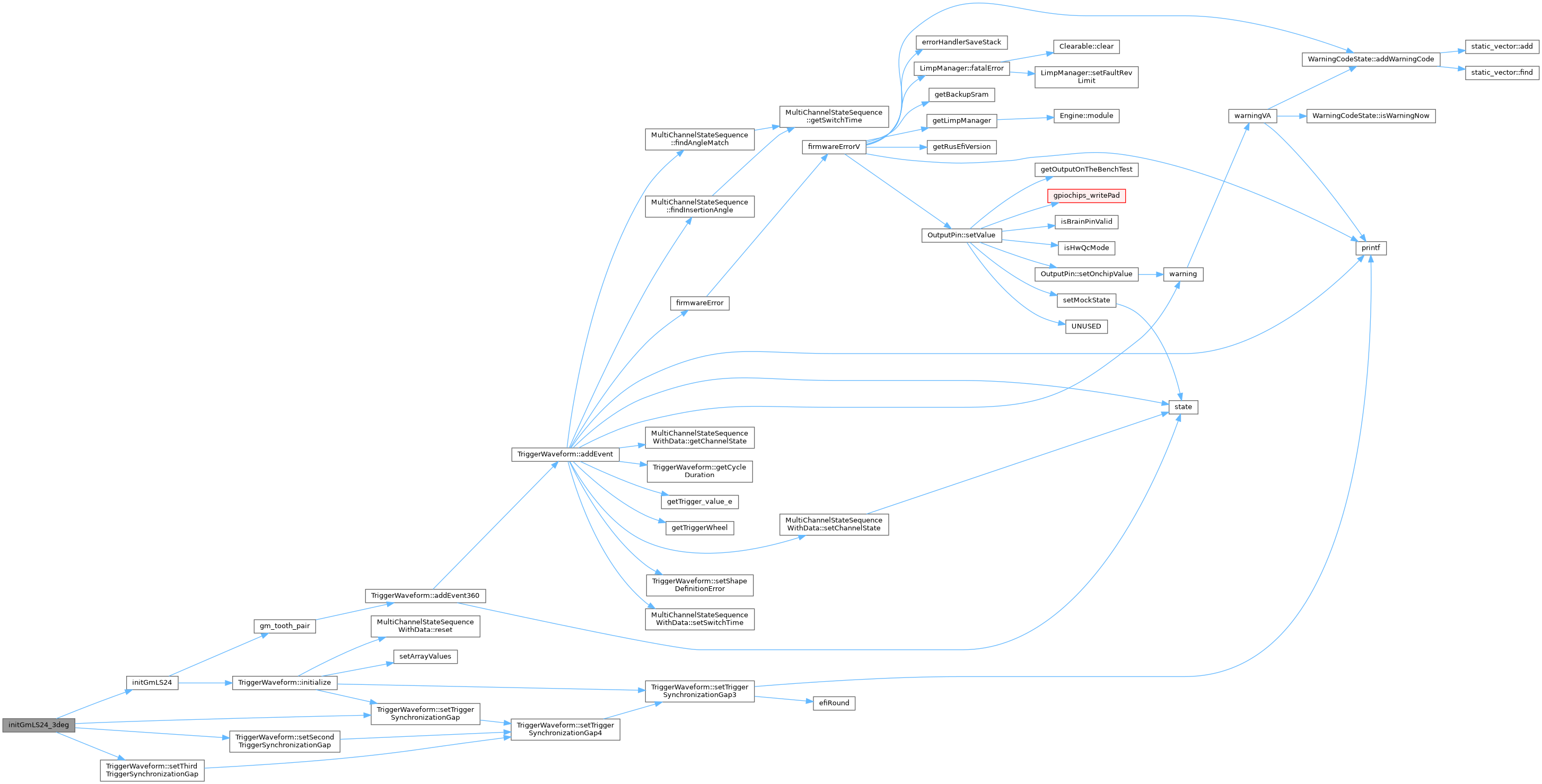
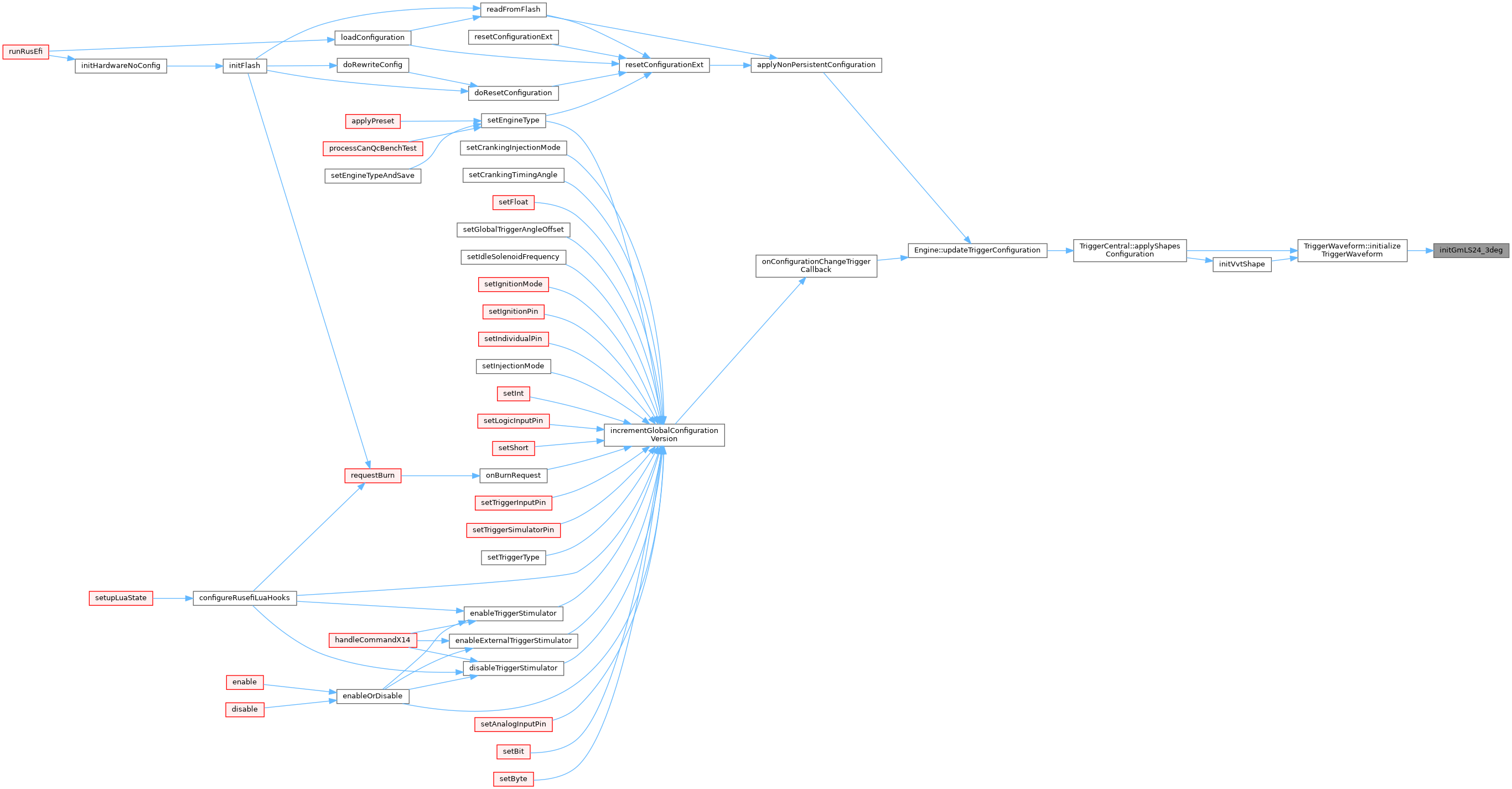
◆ initGmLS24_3deg()
| void initGmLS24_3deg | ( | TriggerWaveform * | s | ) |
Definition at line 159 of file trigger_gm.cpp.
Referenced by TriggerWaveform::initializeTriggerWaveform().
◆ initGmLS24_5deg()
| void initGmLS24_5deg | ( | TriggerWaveform * | s | ) |
Definition at line 147 of file trigger_gm.cpp.
Referenced by TriggerWaveform::initializeTriggerWaveform().