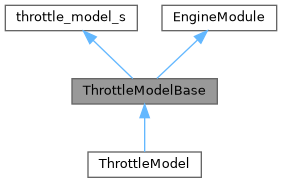
#include <throttle_model.h>
Public Types | |
| using | interface_t = ThrottleModelBase |
Public Member Functions | |
| void | onSlowCallback () override |
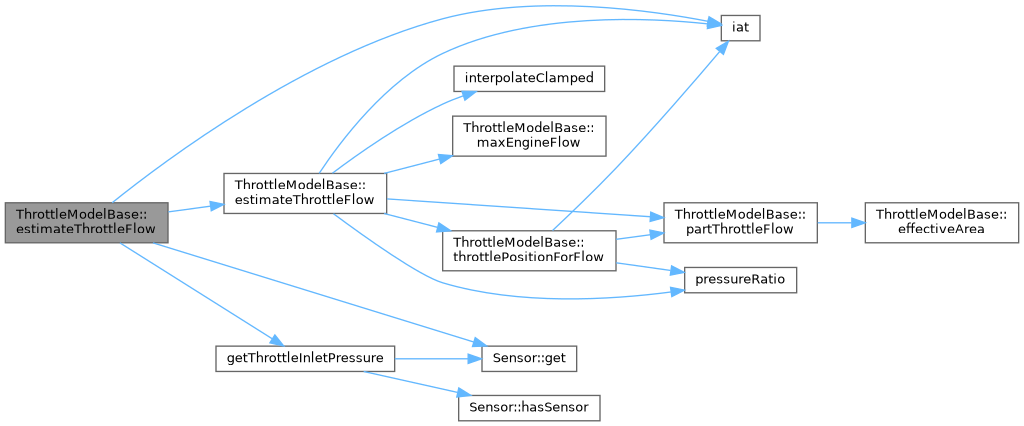
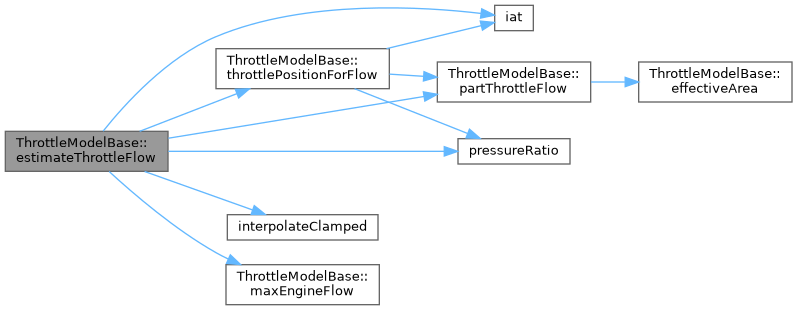
| float | estimateThrottleFlow (float tip, float tps, float map, float iat) |
| expected< float > | estimateThrottleFlow (float map, float tps) |
| float | partThrottleFlow (float tps, float flowCorrection) const |
| float | partThrottleFlow (float tps, float pressureRatio, float p_up, float iat) const |
| float | throttlePositionForFlow (float flow, float pressureRatio, float p_up, float iat) const |
 Public Member Functions inherited from EngineModule Public Member Functions inherited from EngineModule | |
| virtual void | initNoConfiguration () |
| virtual void | setDefaultConfiguration () |
| virtual void | onConfigurationChange (engine_configuration_s const *) |
| virtual void | onFastCallback () |
| virtual void | onEngineStop () |
| virtual void | onIgnitionStateChanged (bool) |
| virtual bool | needsDelayedShutoff () |
| virtual void | onEnginePhase (float, efitick_t, angle_t, angle_t) |
Protected Member Functions | |
| virtual float | effectiveArea (float tps) const =0 |
| virtual float | maxEngineFlow (float map) const =0 |
Detailed Description
Definition at line 7 of file throttle_model.h.
Member Typedef Documentation
◆ interface_t
Definition at line 9 of file throttle_model.h.
Member Function Documentation
◆ effectiveArea()
Implemented in ThrottleModel.
Referenced by partThrottleFlow().

◆ estimateThrottleFlow() [1/2]
Definition at line 134 of file throttle_model.cpp.
◆ estimateThrottleFlow() [2/2]
Definition at line 92 of file throttle_model.cpp.
Referenced by estimateThrottleFlow(), and onSlowCallback().
◆ maxEngineFlow()
Implemented in ThrottleModel.
Referenced by estimateThrottleFlow().

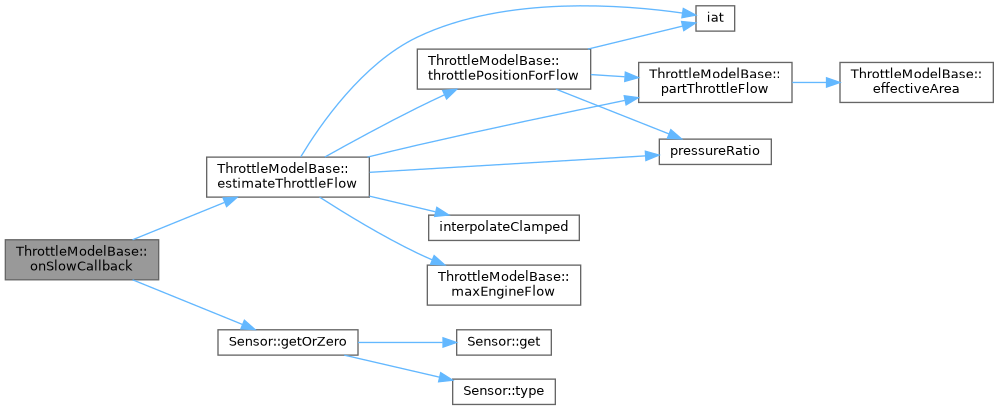
◆ onSlowCallback()
|
overridevirtual |
Reimplemented from EngineModule.
Definition at line 147 of file throttle_model.cpp.
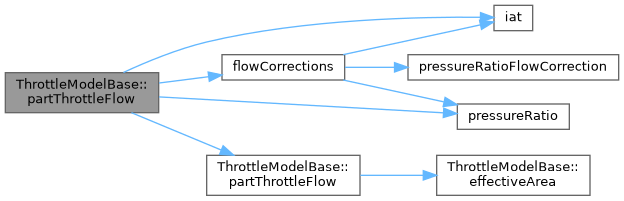
◆ partThrottleFlow() [1/2]
Definition at line 40 of file throttle_model.cpp.
Referenced by estimateThrottleFlow(), partThrottleFlow(), and throttlePositionForFlow().


◆ partThrottleFlow() [2/2]
| float ThrottleModelBase::partThrottleFlow | ( | float | tps, |
| float | pressureRatio, | ||
| float | p_up, | ||
| float | iat | ||
| ) | const |
Definition at line 44 of file throttle_model.cpp.
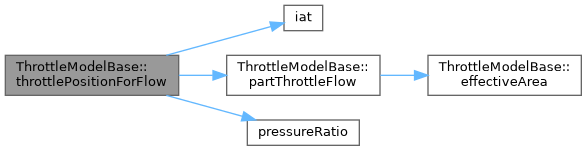
◆ throttlePositionForFlow()
| float ThrottleModelBase::throttlePositionForFlow | ( | float | flow, |
| float | pressureRatio, | ||
| float | p_up, | ||
| float | iat | ||
| ) | const |
Definition at line 77 of file throttle_model.cpp.
Referenced by estimateThrottleFlow().

The documentation for this struct was generated from the following files:
- controllers/math/throttle_model.h
- controllers/math/throttle_model.cpp