Detailed Description
- Date
- Mar 15, 2013
Definition in file status_loop.h.
Functions | |
| void | updateDevConsoleState () |
| Sends all pending data to rusEfi console. | |
| void | startStatusThreads () |
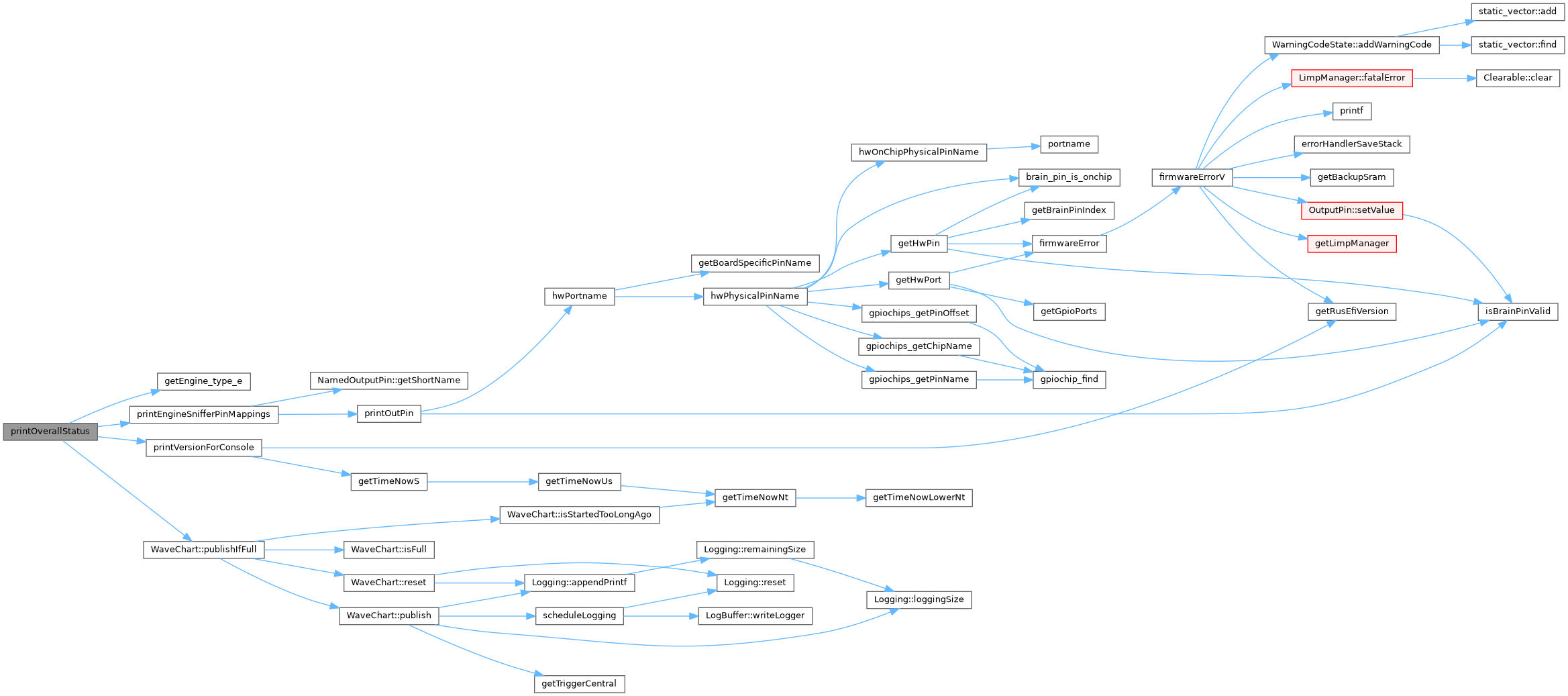
| void | printOverallStatus () |
Function Documentation
◆ printOverallStatus()
| void printOverallStatus | ( | ) |
we report the version every second - this way the console does not need to request it and we will display it pretty soon
Definition at line 145 of file status_loop.cpp.
145 {
146#if EFI_ENGINE_SNIFFER
148#endif /* EFI_ENGINE_SNIFFER */
149
150
151 /**
152 * we report the version every second - this way the console does not need to
153 * request it and we will display it pretty soon
154 */
156 // we're sending, reset the timer
157 printVersionTimer.reset();
158
159 // Output the firmware version, board type, git hash, uptime in seconds, etc for rusEFI console
161
162 // Output the current engine sniffer pin mappings
164 }
165}
const char * getEngine_type_e(engine_type_e value)
Definition auto_generated_engine_type_e.cpp:8
static constexpr engine_configuration_s * engineConfiguration
Definition engine_configuration.h:80
static void printEngineSnifferPinMappings()
Definition status_loop.cpp:126
static void printVersionForConsole(const char *engineTypeName, const char *firmwareBuildId)
Definition status_loop.cpp:96
engine_type_e engineType
Referenced by handleGetText().
Here is the call graph for this function:
Here is the caller graph for this function:

◆ startStatusThreads()
| void startStatusThreads | ( | ) |
Definition at line 768 of file status_loop.cpp.
768 {
769 // todo: refactoring needed, this file should probably be split into pieces
770#if EFI_PROD_CODE
771 initStatusLeds();
772 communicationsBlinkingTask.start();
773#endif /* EFI_PROD_CODE */
774}
static CommunicationBlinkingTask communicationsBlinkingTask
Definition status_loop.cpp:328
Referenced by commonEarlyInit().
Here is the call graph for this function:

Here is the caller graph for this function:

◆ updateDevConsoleState()
| void updateDevConsoleState | ( | ) |
Sends all pending data to rusEfi console.
This method is periodically invoked by the main loop todo: is this mostly dead code?
Definition at line 183 of file status_loop.cpp.
183 {
184#if EFI_PROD_CODE
185 // todo: unify with simulator!
186 if (hasFirmwareError()) {
188 return;
189 }
190#endif /* EFI_PROD_CODE */
191
192#if EFI_RTC
194#endif
195
196#if HAL_USE_ADC
197 printFullAdcReportIfNeeded();
198#endif /* HAL_USE_ADC */
199
200#if EFI_ENGINE_CONTROL && EFI_SHAFT_POSITION_INPUT
203static int prevCkpEventCounter = -1;
205 if (prevCkpEventCounter == currentCkpEventCounter && timeOfPreviousReport == nowSeconds) {
206 return;
207 }
208 timeOfPreviousReport = nowSeconds;
209
210 prevCkpEventCounter = currentCkpEventCounter;
211#else
212 chThdSleepMilliseconds(200);
213#endif
214
215#if EFI_LOGIC_ANALYZER
218#endif /* EFI_LOGIC_ANALYZER */
219}
int64_t getTotalEventCounter() const
Definition trigger_decoder.cpp:175
static Logging logicAnalyzerLogger("logic analyzer", logicAnalyzerBuffer, sizeof(logicAnalyzerBuffer))
uint32_t rtcUnixEpochTime
Definition output_channels_generated.h:1441
Referenced by runMainLoop().
Here is the call graph for this function:

Here is the caller graph for this function:
