Detailed Description
Functions | |
| brain_pin_e | getAdcChannelBrainPin (const char *msg, adc_channel_e hwChannel) |
| adc_channel_e | getAdcChannel (brain_pin_e pin) |
| bool | adcIsMuxedInput (adc_channel_e hwChannel) |
| adc_channel_e | adcMuxedGetParent (adc_channel_e hwChannel) |
| int | getAdcInternalChannel (ADC_TypeDef *adc, adc_channel_e hwChannel) |
| adc_channel_e | getHwChannelForAdcInput (ADC_TypeDef *adc, size_t hwIndex) |
| ioportid_t | getAdcChannelPort (const char *msg, adc_channel_e hwChannel) |
| int | getAdcChannelPin (adc_channel_e hwChannel) |
| void | jump_to_bootloader () |
| int | getRemainingStack (thread_t *otp) |
Function Documentation
◆ adcIsMuxedInput()
| bool adcIsMuxedInput | ( | adc_channel_e | hwChannel | ) |
Definition at line 112 of file kinetis_common.cpp.
◆ adcMuxedGetParent()
| adc_channel_e adcMuxedGetParent | ( | adc_channel_e | hwChannel | ) |
Definition at line 116 of file kinetis_common.cpp.
◆ getAdcChannel()
| adc_channel_e getAdcChannel | ( | brain_pin_e | pin | ) |
Definition at line 73 of file kinetis_common.cpp.
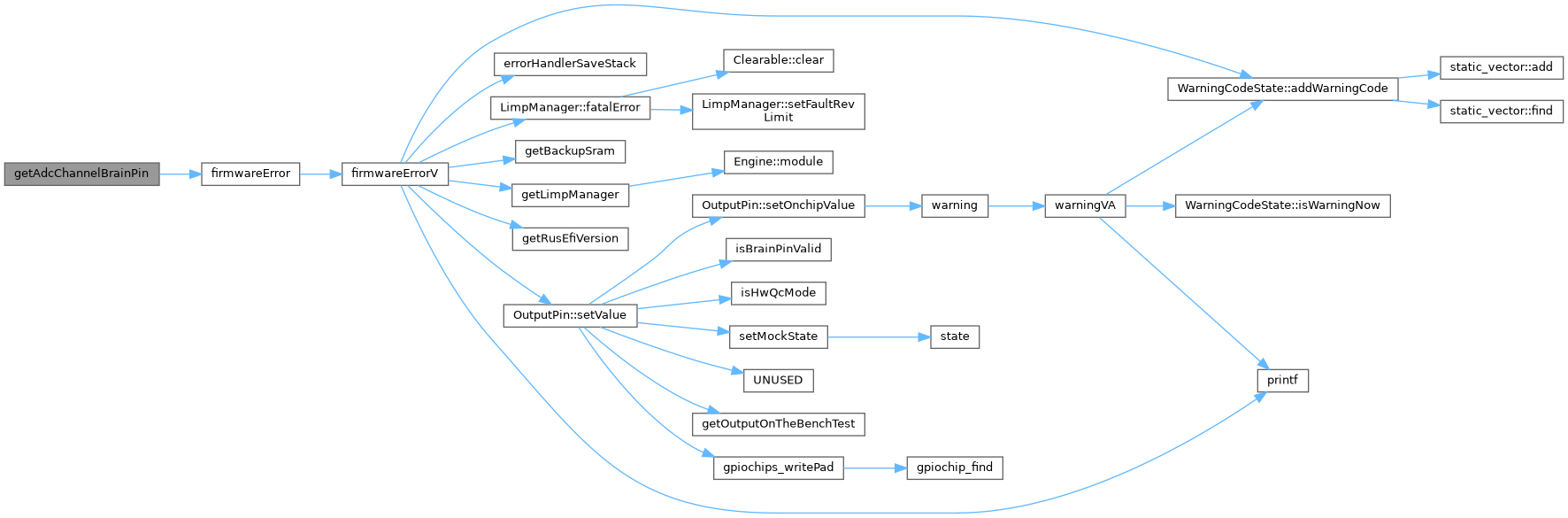
◆ getAdcChannelBrainPin()
| brain_pin_e getAdcChannelBrainPin | ( | const char * | msg, |
| adc_channel_e | hwChannel | ||
| ) |
Definition at line 30 of file kinetis_common.cpp.
Referenced by getAdcChannelPin(), and getAdcChannelPort().
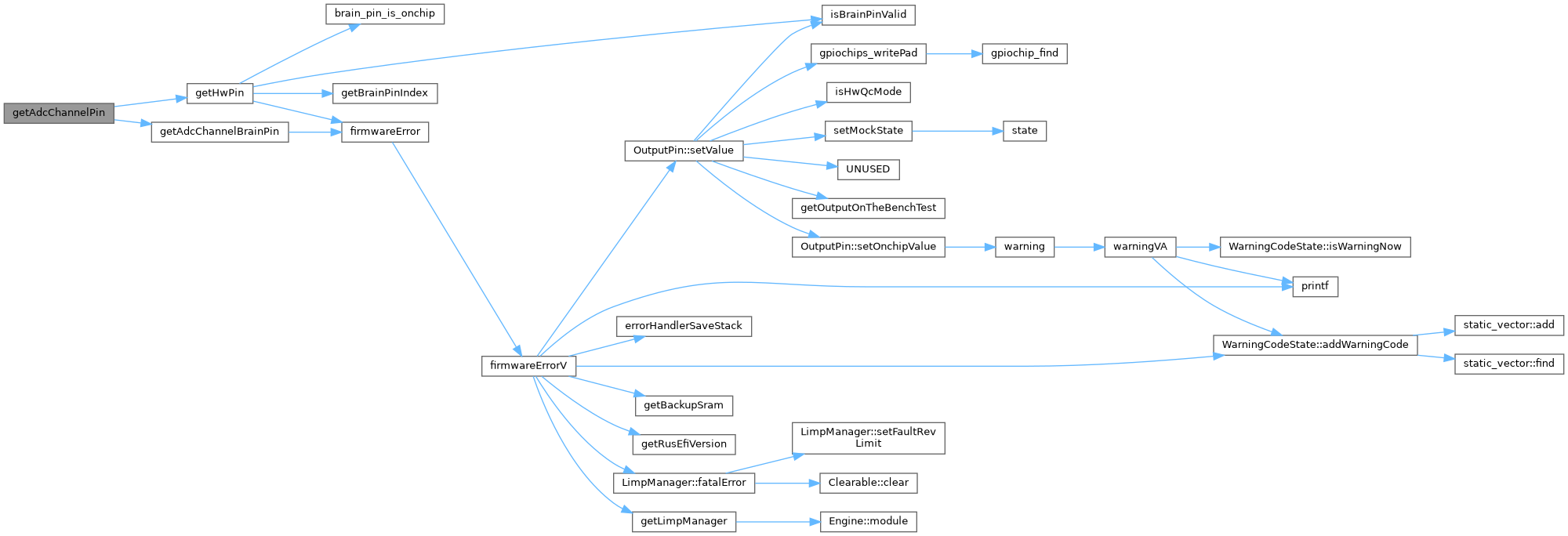
◆ getAdcChannelPin()
| int getAdcChannelPin | ( | adc_channel_e | hwChannel | ) |
Definition at line 140 of file kinetis_common.cpp.
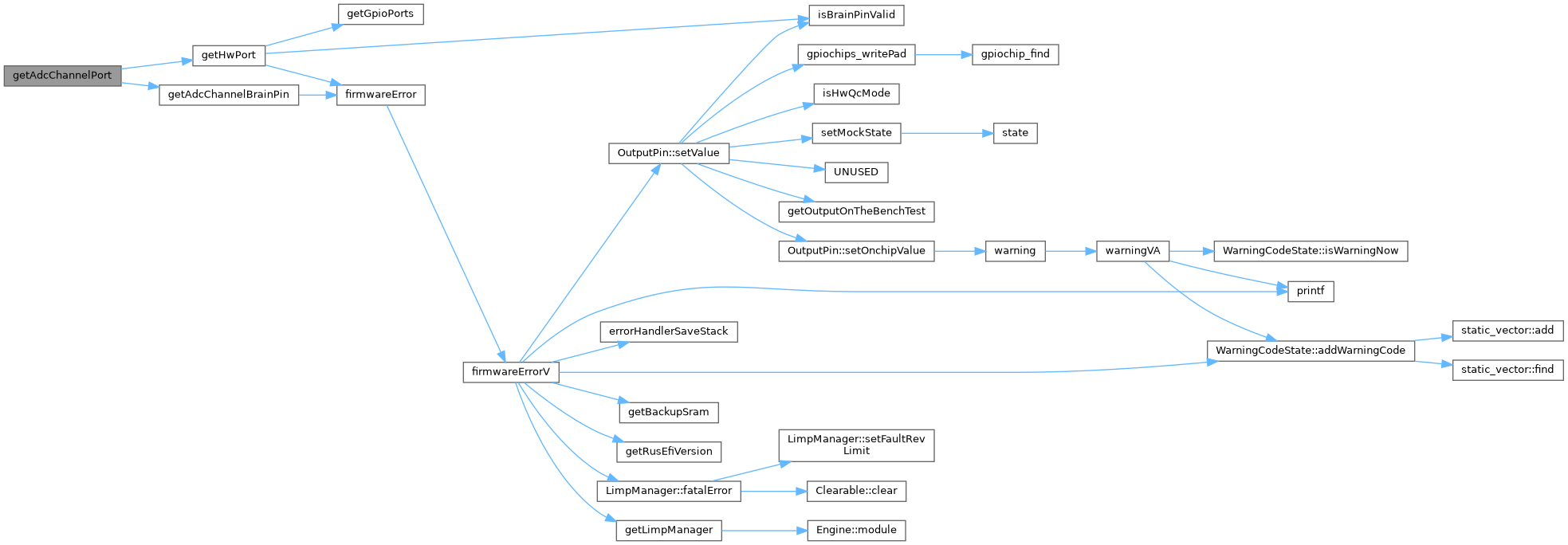
◆ getAdcChannelPort()
| ioportid_t getAdcChannelPort | ( | const char * | msg, |
| adc_channel_e | hwChannel | ||
| ) |
Definition at line 135 of file kinetis_common.cpp.
◆ getAdcInternalChannel()
| int getAdcInternalChannel | ( | ADC_TypeDef * | adc, |
| adc_channel_e | hwChannel | ||
| ) |
Definition at line 121 of file kinetis_common.cpp.
◆ getHwChannelForAdcInput()
| adc_channel_e getHwChannelForAdcInput | ( | ADC_TypeDef * | adc, |
| size_t | hwIndex | ||
| ) |
Definition at line 127 of file kinetis_common.cpp.
◆ getRemainingStack()
| int getRemainingStack | ( | thread_t * | otp | ) |
Of note is that interrupts are NOT serviced on the stack of the thread that was running when the interrupt occurred. The only thing that happens on that thread's stack is that its registers are pushed (by hardware) when an interrupt occurs, just before swapping the stack pointer out for the main stack (currently 0x400=1024 bytes), where the ISR actually runs. see also main_stack_size see also process_stack_size
see also http://www.chibios.org/dokuwiki/doku.php?id=chibios:kb:stacks
In the firmware we are using 'extern *Engine' - in the firmware Engine is a singleton
On the other hand, in order to have a meaningful unit test we are passing Engine * engine as a parameter
Definition at line 159 of file kinetis_common.cpp.
◆ jump_to_bootloader()
| void jump_to_bootloader | ( | ) |
Definition at line 148 of file kinetis_common.cpp.