Detailed Description
Functions | |
| void | initHip9011 () |
| void | startHip9011_pins () |
| void | stopHip9011_pins () |
| void | hipAdcCallback (float volts) |
| void | hip9011_onFireEvent (uint8_t cylinderNumber, efitick_t nowNt) |
Function Documentation
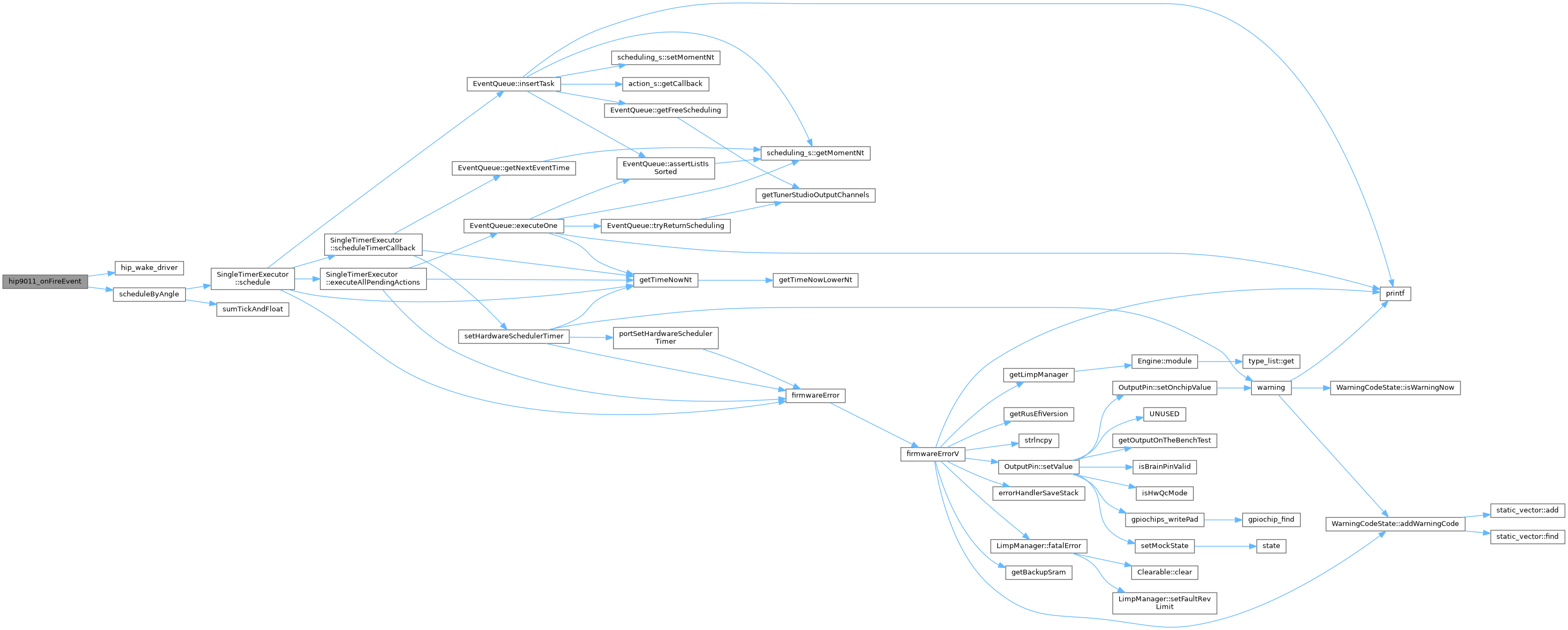
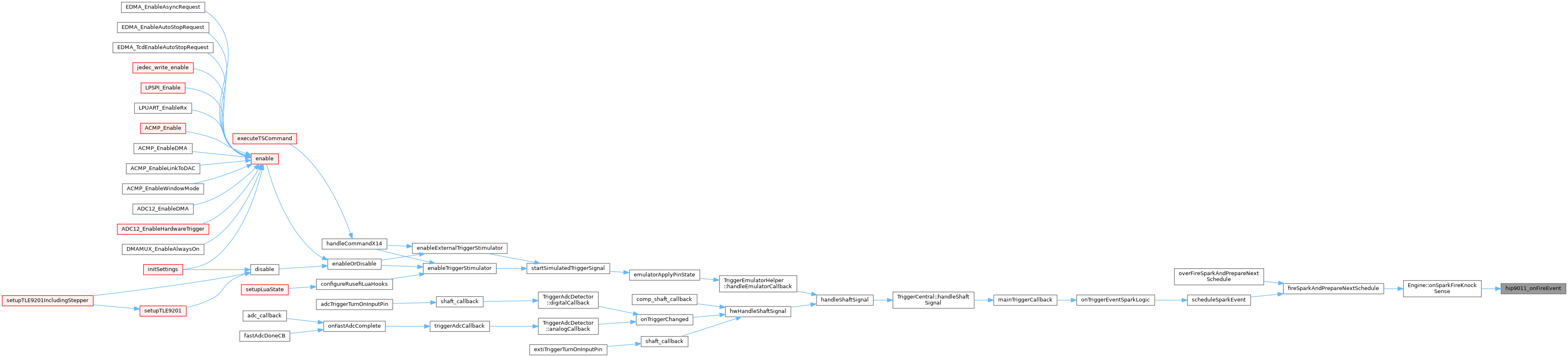
◆ hip9011_onFireEvent()
| void hip9011_onFireEvent | ( | uint8_t | cylinderNumber, |
| efitick_t | nowNt | ||
| ) |
Ignition callback used to start HIP integration and schedule finish
Definition at line 283 of file hip9011.cpp.
283 {
285 return;
286
287 /* We are not checking here for READY_TO_INTEGRATE state as
288 * previous integration may be still in progress, while
289 * we are scheduling next integration start only
290 * knockDetectionWindowStart from now.
291 * Check for correct state will be done at startIntegration () */
292
294 /* save currect cylinder */
296
297 /* smart books says we need to sence knock few degrees after TDC
298 * currently I have no idea how to hook to cylinder TDC in correct way.
299 * So schedule start of integration + knockDetectionWindowStart from fire event
300 * Keep this is mind when setting knockDetectionWindowStart */
303 { startIntegration, &instance });
304
307 { endIntegration, &instance });
308 } else {
309 #if EFI_HIP_9011_DEBUG
310 /* out of sync */
313 #endif
314 /* save currect cylinder */
316 /* Skip integration, call driver task to prepare for next cylinder */
318 hip_wake_driver();
319 }
320}
static constexpr engine_configuration_s * engineConfiguration
Definition engine_configuration.h:79
efitick_t scheduleByAngle(scheduling_s *timer, efitick_t nowNt, angle_t angle, action_s action)
Definition rpm_calculator.cpp:382
HIP9011 instance
bool isHip9011Enabled
int16_t knockSamplingDuration
float knockDetectionWindowStart
Referenced by Engine::onSparkFireKnockSense().
Here is the call graph for this function:
Here is the caller graph for this function:
◆ hipAdcCallback()
| void hipAdcCallback | ( | float | volts | ) |
Definition at line 322 of file hip9011.cpp.
322 {
323 /* we read in digital mode */
325 return;
329 /* offload calculations to driver thread */
331 /* normalize to 0..HIP9011_DIGITAL_OUTPUT_MAX */
333 volts * HIP9011_DIGITAL_OUTPUT_MAX / HIP9011_ANALOG_OUTPUT_MAX;
334 }
336 hip_wake_driver();
337 }
338}
Referenced by onFastAdcComplete().
Here is the call graph for this function:

Here is the caller graph for this function:

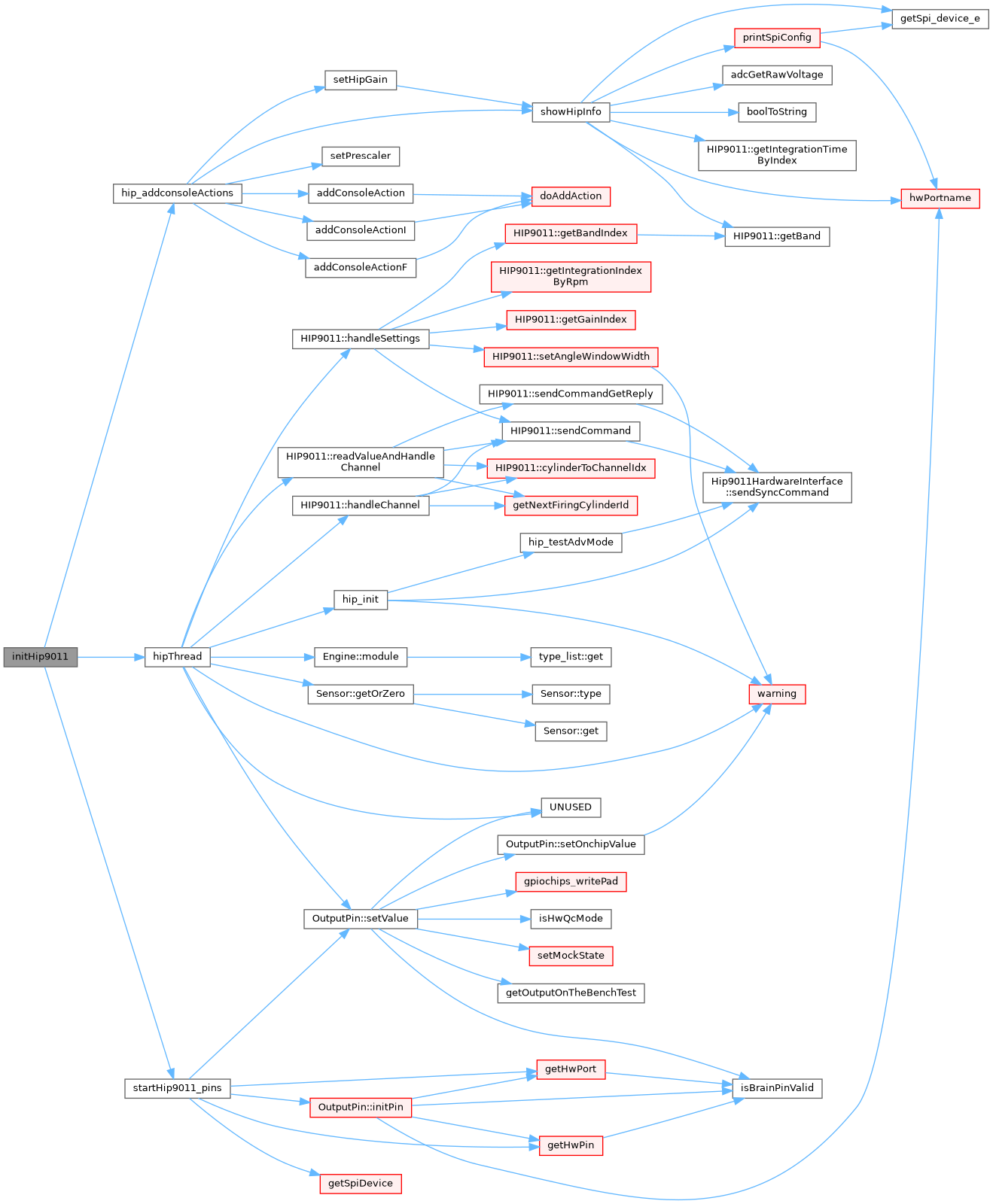
◆ initHip9011()
| void initHip9011 | ( | ) |
Definition at line 564 of file hip9011.cpp.
564 {
566 return;
567
568 startHip9011_pins();
569
570 /* load settings */
572
573 efiPrintf("Starting HIP9011/TPIC8101 driver");
574
575 /* init semaphore */
576 chSemObjectInit(&wake, 10);
577 chThdCreateStatic(hipThreadStack, sizeof(hipThreadStack), PRIO_HIP9011, (tfunc_t)(void*) hipThread, NULL);
578
579 #if EFI_HIP_9011_DEBUG
580 hip_addconsoleActions();
581 #endif
582}
uint8_t hip9011Prescaler
Referenced by initHardware().
Here is the call graph for this function:
Here is the caller graph for this function:

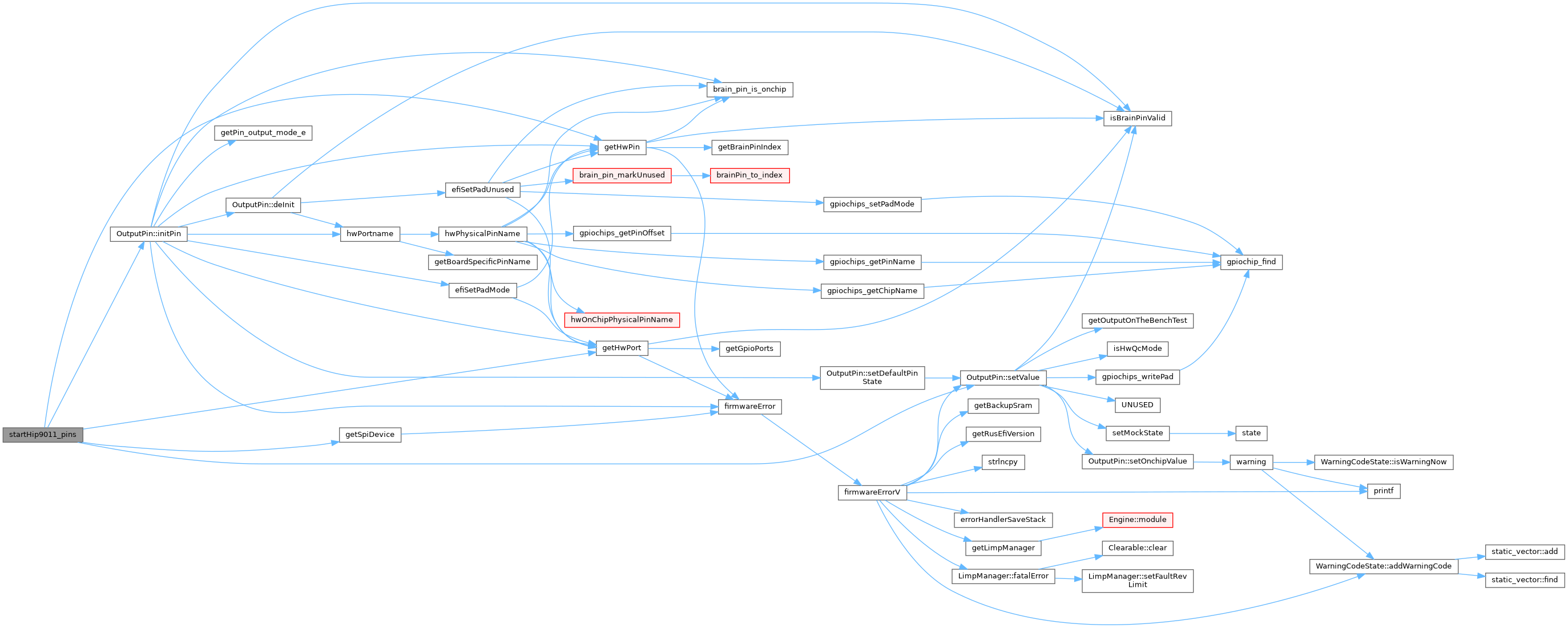
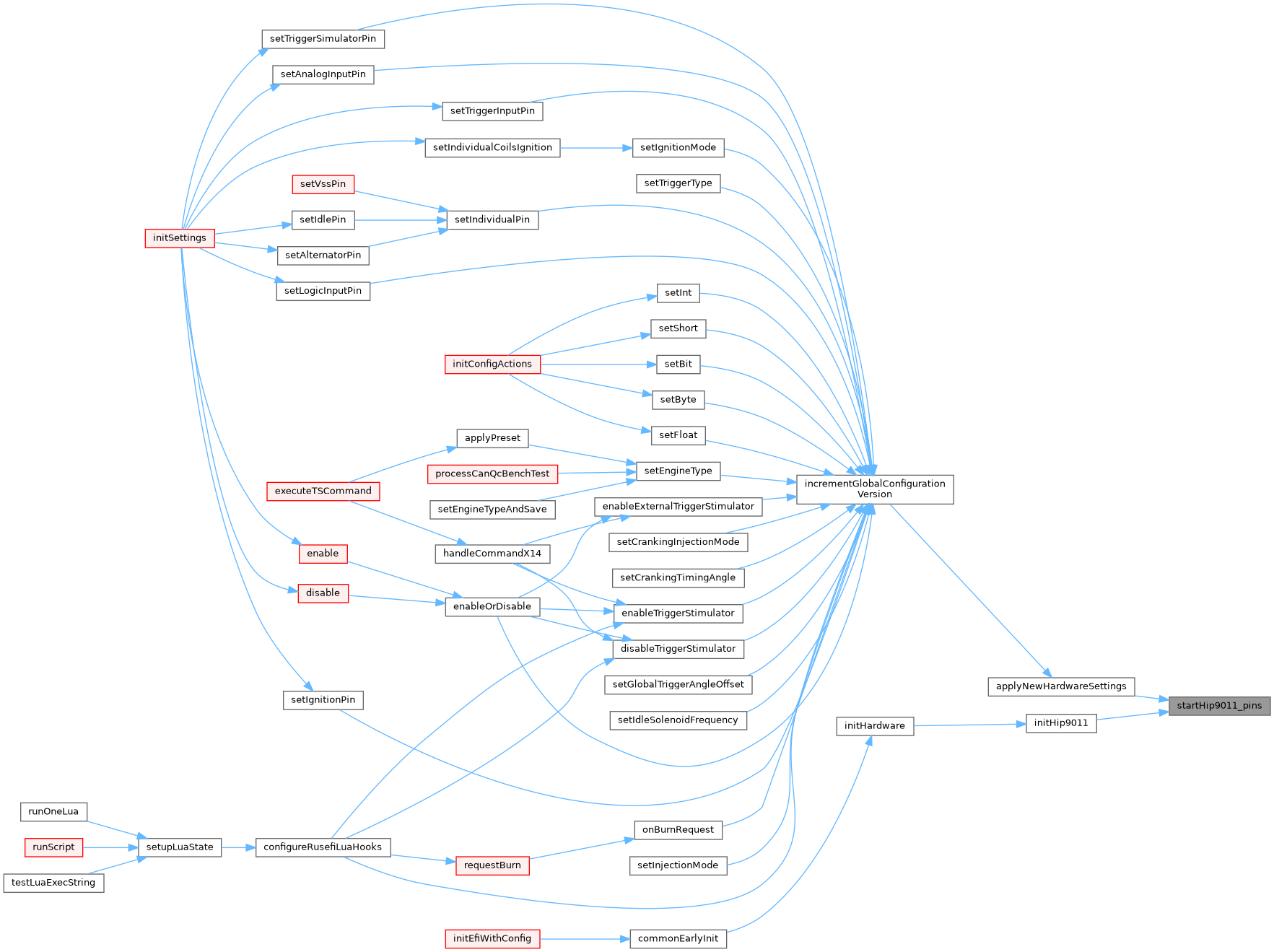
◆ startHip9011_pins()
| void startHip9011_pins | ( | ) |
Definition at line 547 of file hip9011.cpp.
547 {
548 intHold.initPin("hip int/hold", engineConfiguration->hip9011IntHoldPin, engineConfiguration->hip9011IntHoldPinMode);
552
553#if EFI_PROD_CODE
556 // error already reported
557 return;
558 }
561#endif /* EFI_PROD_CODE */
562}
void initPin(const char *msg, brain_pin_e brainPin, pin_output_mode_e outputMode, bool forceInitWithFatalError=false)
Definition efi_gpio.cpp:697
void setValue(const char *msg, int logicValue, bool isForce=false)
Definition efi_gpio.cpp:590
static NamedOutputPin intHold(PROTOCOL_HIP_NAME)
static NamedOutputPin Cs(PROTOCOL_HIP_NAME)
Gpio hip9011IntHoldPin
pin_output_mode_e hip9011CsPinMode
Gpio hip9011CsPin
pin_output_mode_e hip9011IntHoldPinMode
spi_device_e hip9011SpiDevice
Referenced by applyNewHardwareSettings(), and initHip9011().
Here is the call graph for this function:
Here is the caller graph for this function:
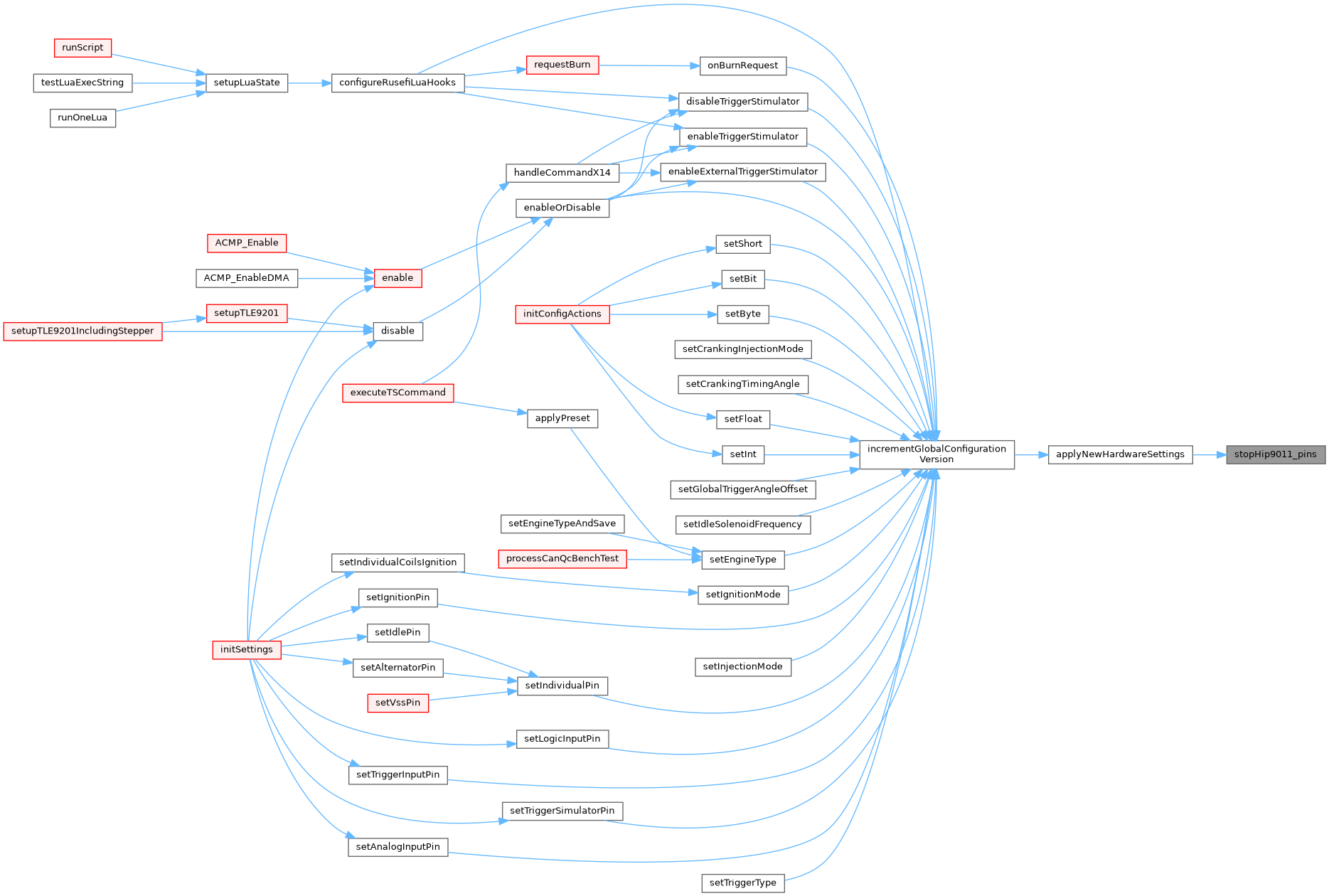
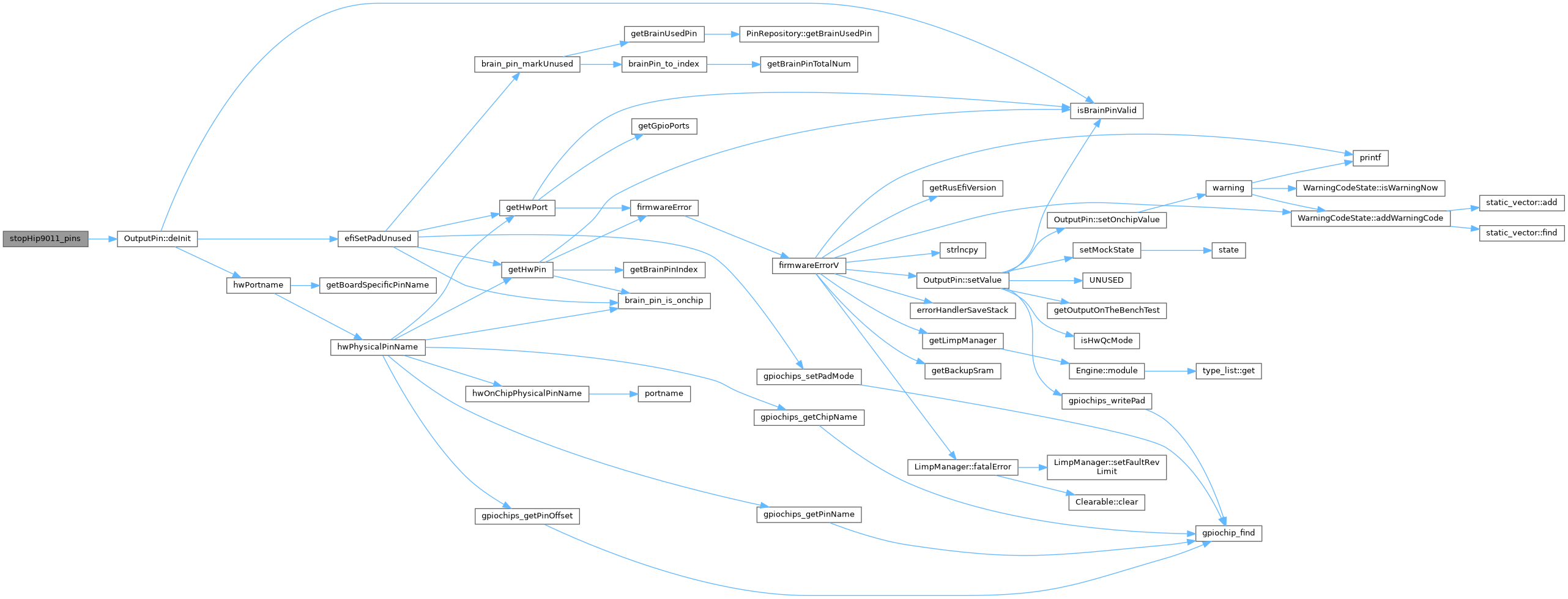
◆ stopHip9011_pins()
| void stopHip9011_pins | ( | ) |
Definition at line 538 of file hip9011.cpp.
Referenced by applyNewHardwareSettings().
Here is the call graph for this function:
Here is the caller graph for this function: