Functions | |
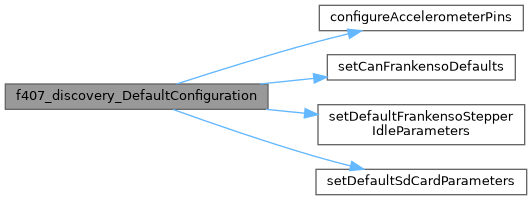
| static void | setDefaultFrankensoStepperIdleParameters () |
| static void | setCanFrankensoDefaults () |
| Gpio | getWarningLedPin () |
| Gpio | getCommsLedPin () |
| Gpio | getRunningLedPin () |
| static void | configureAccelerometerPins () |
| static void | f407_discovery_DefaultConfiguration () |
| Hardware board-specific default configuration (GPIO pins, ADC channels, SPI configs etc.) | |
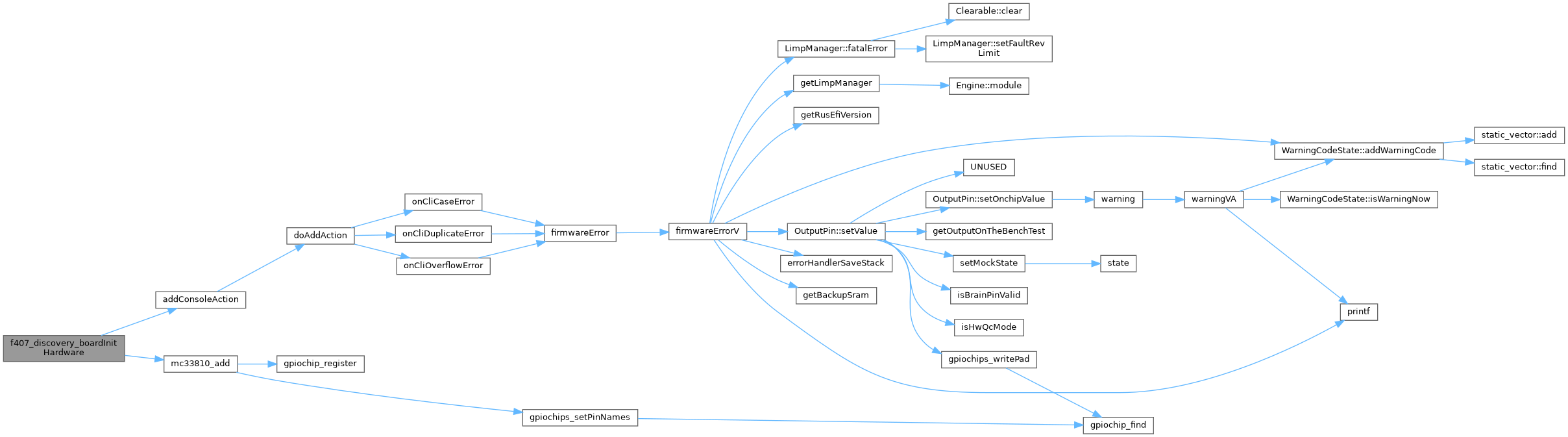
| void | f407_discovery_boardInitHardware () |
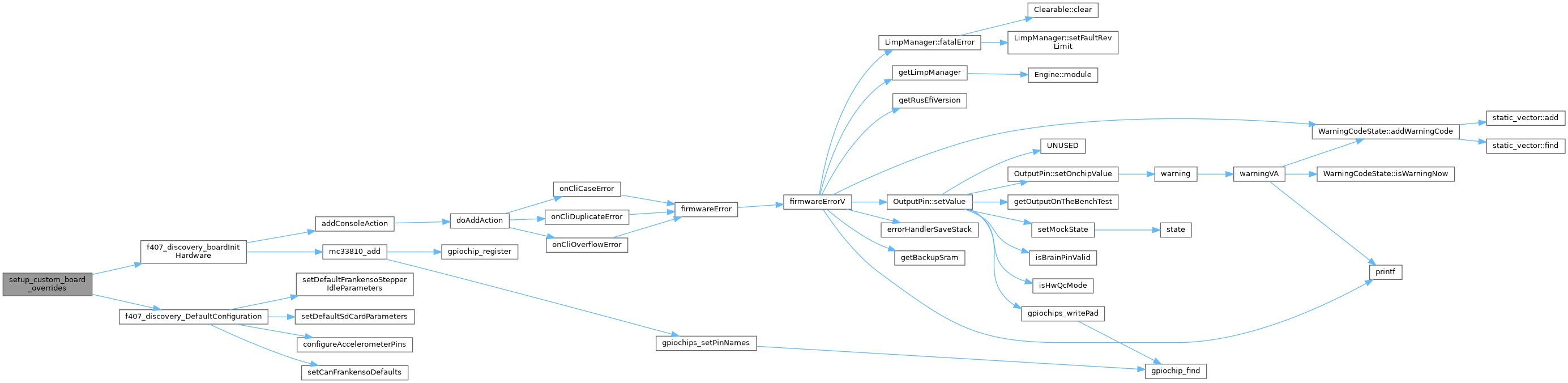
| void | setup_custom_board_overrides () |
Function Documentation
◆ configureAccelerometerPins()
|
static |
Definition at line 42 of file board_configuration.cpp.
Referenced by f407_discovery_DefaultConfiguration().

◆ f407_discovery_boardInitHardware()
| void f407_discovery_boardInitHardware | ( | ) |
Definition at line 116 of file board_configuration.cpp.
Referenced by setup_custom_board_overrides().

◆ f407_discovery_DefaultConfiguration()
|
static |
Hardware board-specific default configuration (GPIO pins, ADC channels, SPI configs etc.)
Definition at line 56 of file board_configuration.cpp.
Referenced by setup_custom_board_overrides().

◆ getCommsLedPin()
| Gpio getCommsLedPin | ( | ) |
Definition at line 26 of file board_configuration.cpp.
◆ getRunningLedPin()
| Gpio getRunningLedPin | ( | ) |
Definition at line 36 of file board_configuration.cpp.
◆ getWarningLedPin()
| Gpio getWarningLedPin | ( | ) |
Definition at line 21 of file board_configuration.cpp.
◆ setCanFrankensoDefaults()
|
static |
Definition at line 16 of file board_configuration.cpp.
Referenced by f407_discovery_DefaultConfiguration().

◆ setDefaultFrankensoStepperIdleParameters()
|
static |
Definition at line 8 of file board_configuration.cpp.
Referenced by f407_discovery_DefaultConfiguration().

◆ setup_custom_board_overrides()
| void setup_custom_board_overrides | ( | ) |
Definition at line 179 of file board_configuration.cpp.