#include <stepper.h>
Public Member Functions | |
| void | initialize (brain_pin_e stepPin, brain_pin_e directionPin, pin_output_mode_e directionPinMode, float reactionTime, brain_pin_e enablePin, pin_output_mode_e enablePinMode) |
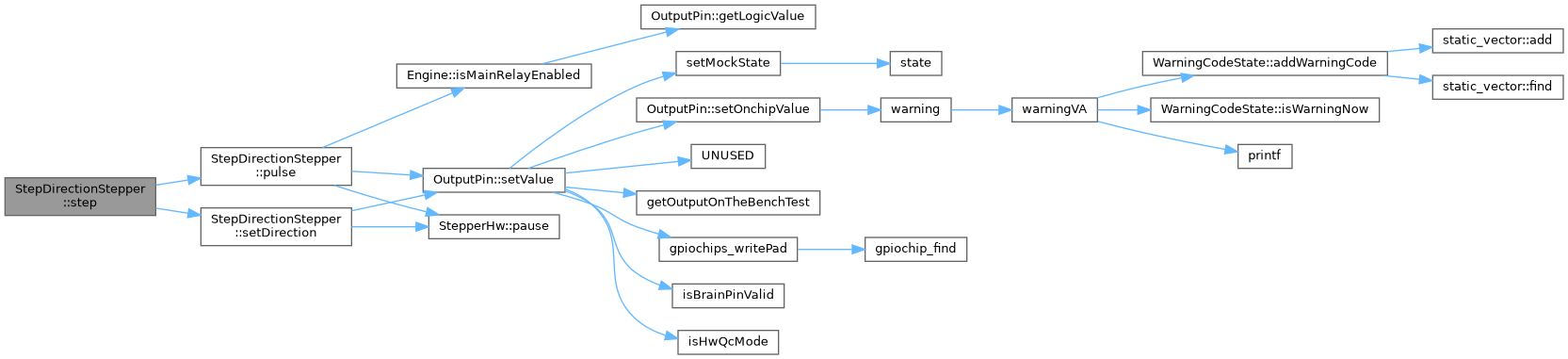
| bool | step (bool positive) override |
 Public Member Functions inherited from StepperHw Public Member Functions inherited from StepperHw | |
| void | pause (int divisor=1) const |
| virtual void | sleep () |
Private Member Functions | |
| bool | pulse () |
| void | setDirection (bool isIncrementing) |
Additional Inherited Members | |
| Protected Member Functions inherited from StepperHw | |
| void | setReactionTime (float ms) |
Detailed Description
Member Function Documentation
◆ initialize()
| void StepDirectionStepper::initialize | ( | brain_pin_e | stepPin, |
| brain_pin_e | directionPin, | ||
| pin_output_mode_e | directionPinMode, | ||
| float | reactionTime, | ||
| brain_pin_e | enablePin, | ||
| pin_output_mode_e | enablePinMode | ||
| ) |
Definition at line 217 of file stepper.cpp.
Referenced by applyIACposition().


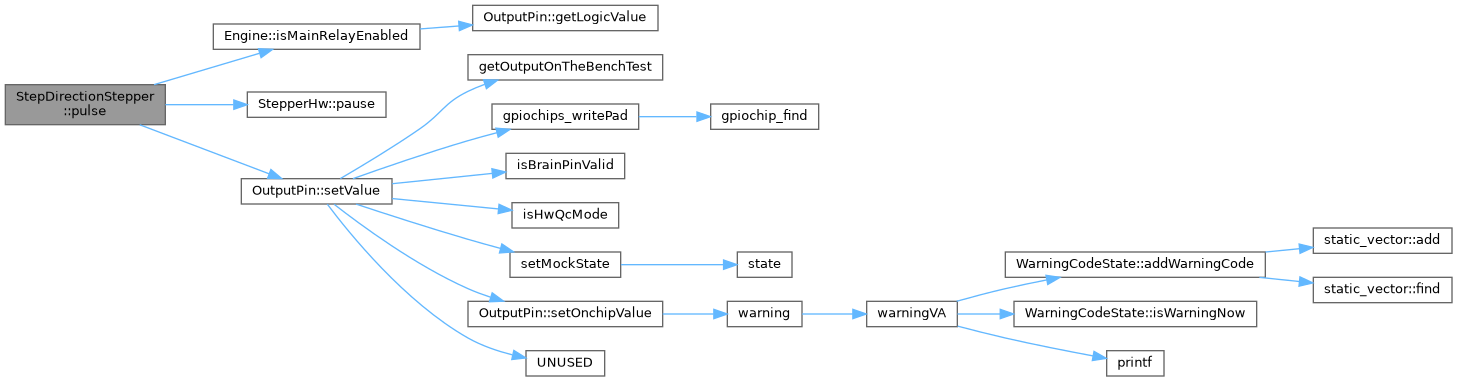
◆ pulse()
|
private |
Definition at line 175 of file stepper.cpp.
Referenced by step().

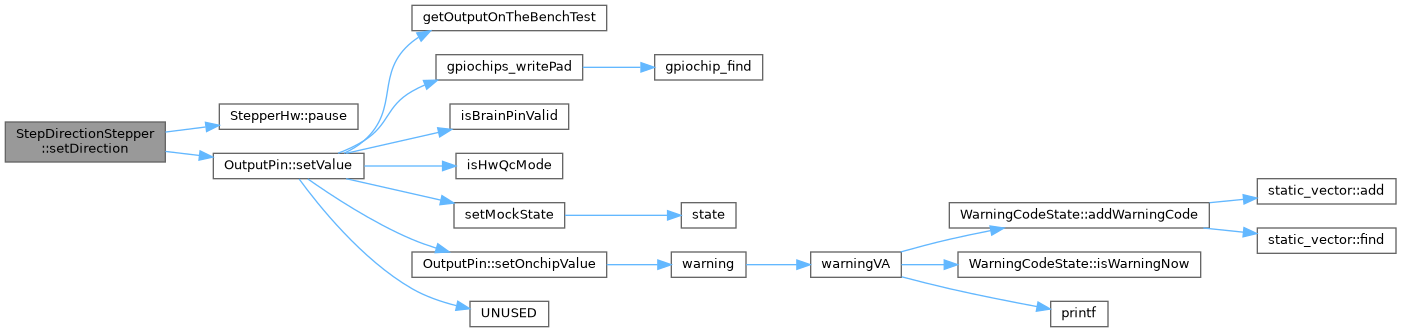
◆ setDirection()
|
private |
Definition at line 165 of file stepper.cpp.
Referenced by step().

◆ step()
Implements StepperHw.
Definition at line 206 of file stepper.cpp.
Field Documentation
◆ directionPin
|
private |
Definition at line 42 of file stepper.h.
Referenced by initialize(), and setDirection().
◆ directionPinMode
|
private |
Definition at line 43 of file stepper.h.
Referenced by initialize().
◆ enablePin
|
private |
Definition at line 42 of file stepper.h.
Referenced by initialize(), and pulse().
◆ enablePinMode
|
private |
Definition at line 43 of file stepper.h.
Referenced by initialize().
◆ m_currentDirection
|
private |
Definition at line 40 of file stepper.h.
Referenced by initialize(), and setDirection().
◆ stepPin
|
private |
Definition at line 42 of file stepper.h.
Referenced by initialize(), and pulse().
◆ stepPinMode
|
private |
Definition at line 43 of file stepper.h.
Referenced by initialize().
The documentation for this class was generated from the following files:
- hw_layer/stepper.h
- hw_layer/stepper.cpp