#include <redundant_sensor.h>
Public Member Functions | |
| RedundantSensor (SensorType outputType, SensorType firstSensor, SensorType secondSensor) | |
| void | configure (float maxDifference, bool ignoreSecondSensor) |
| SensorResult | get () const override |
| bool | isRedundant () const override |
| void | showInfo (const char *sensorName) const override |
 Public Member Functions inherited from Sensor Public Member Functions inherited from Sensor | |
| bool | Register () |
| const char * | getSensorName () const |
| virtual bool | hasSensor () const |
| virtual float | getRaw () const |
| void | unregister () |
| SensorType | type () const |
Private Attributes | |
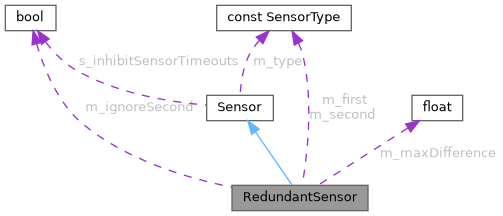
| const SensorType | m_first |
| const SensorType | m_second |
| float | m_maxDifference = 0 |
| bool | m_ignoreSecond = false |
Additional Inherited Members | |
| Static Public Member Functions inherited from Sensor | |
| static void | showAllSensorInfo () |
| static void | showInfo (SensorType type) |
| static void | resetRegistry () |
| static const Sensor * | getSensorOfType (SensorType type) |
| static SensorResult | get (SensorType type) |
| static float | getOrZero (SensorType type) |
| static float | getRaw (SensorType type) |
| static bool | isRedundant (SensorType type) |
| static bool | hasSensor (SensorType type) |
| static void | setMockValue (SensorType type, float value, bool mockRedundant=false) |
| static void | setInvalidMockValue (SensorType type) |
| static void | resetMockValue (SensorType type) |
| static void | resetAllMocks () |
| static void | inhibitTimeouts (bool inhibit) |
| static const char * | getSensorName (SensorType type) |
| Protected Member Functions inherited from Sensor | |
| Sensor (SensorType type) | |
| Static Protected Attributes inherited from Sensor | |
| static bool | s_inhibitSensorTimeouts = false |
Detailed Description
Definition at line 5 of file redundant_sensor.h.
Constructor & Destructor Documentation
◆ RedundantSensor()
| RedundantSensor::RedundantSensor | ( | SensorType | outputType, |
| SensorType | firstSensor, | ||
| SensorType | secondSensor | ||
| ) |
Definition at line 5 of file redundant_sensor.cpp.
Member Function Documentation
◆ configure()
Definition at line 12 of file redundant_sensor.cpp.
◆ get()
|
overridevirtual |
Implements Sensor.
Definition at line 17 of file redundant_sensor.cpp.

◆ isRedundant()
|
inlineoverridevirtual |
Reimplemented from Sensor.
Definition at line 18 of file redundant_sensor.h.
◆ showInfo()
|
overridevirtual |
Implements Sensor.
Definition at line 50 of file sensor_info_printing.cpp.

Field Documentation
◆ m_first
|
private |
Definition at line 27 of file redundant_sensor.h.
Referenced by get(), and showInfo().
◆ m_ignoreSecond
|
private |
Definition at line 34 of file redundant_sensor.h.
Referenced by configure(), get(), and isRedundant().
◆ m_maxDifference
|
private |
Definition at line 31 of file redundant_sensor.h.
Referenced by configure(), and get().
◆ m_second
|
private |
Definition at line 28 of file redundant_sensor.h.
Referenced by get(), and showInfo().
The documentation for this class was generated from the following files:
- controllers/sensors/redundant_sensor.h
- controllers/sensors/redundant_sensor.cpp
- controllers/sensors/sensor_info_printing.cpp