#include <linear_func.h>
Public Member Functions | |
| LinearFunc (float divideInput=1.0f) | |
| void | configure (float in1, float out1, float in2, float out2, float minOutput, float maxOutput) |
| SensorResult | convert (float inputValue) const override |
| void | showInfo (float testRawValue) const override |
| float | getDivideInput () const |
 Public Member Functions inherited from SensorConverter Public Member Functions inherited from SensorConverter | |
| SensorConverter (const SensorConverter &)=delete | |
| SensorConverter ()=default | |
Private Attributes | |
| float | m_a = 1 |
| float | m_b = 0 |
| float | m_minOutput = 0 |
| float | m_maxOutput = 0 |
| const float | m_divideInput |
Detailed Description
Definition at line 5 of file linear_func.h.
Constructor & Destructor Documentation
◆ LinearFunc()
|
inline |
Definition at line 7 of file linear_func.h.
Member Function Documentation
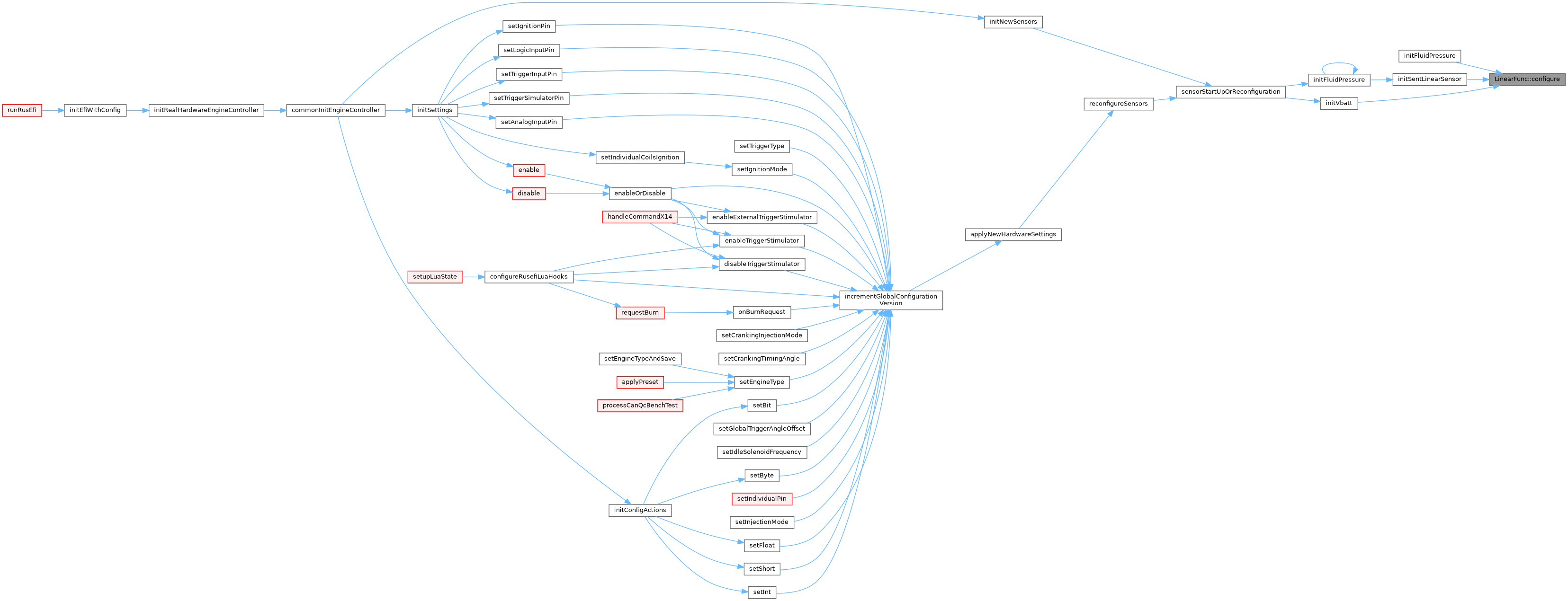
◆ configure()
| void LinearFunc::configure | ( | float | in1, |
| float | out1, | ||
| float | in2, | ||
| float | out2, | ||
| float | minOutput, | ||
| float | maxOutput | ||
| ) |
Definition at line 5 of file linear_func.cpp.
Referenced by initFluidPressure(), initSentLinearSensor(), and initVbatt().
◆ convert()
|
overridevirtual |
Implements SensorConverter.
Definition at line 16 of file linear_func.cpp.
Referenced by showInfo().

◆ getDivideInput()
|
inline |
Definition at line 15 of file linear_func.h.
◆ showInfo()
|
overridevirtual |
Reimplemented from SensorConverter.
Definition at line 87 of file sensor_info_printing.cpp.
Field Documentation
◆ m_a
|
private |
Definition at line 22 of file linear_func.h.
Referenced by configure(), convert(), and showInfo().
◆ m_b
|
private |
Definition at line 23 of file linear_func.h.
Referenced by configure(), convert(), and showInfo().
◆ m_divideInput
|
private |
Definition at line 29 of file linear_func.h.
Referenced by configure(), and getDivideInput().
◆ m_maxOutput
|
private |
Definition at line 26 of file linear_func.h.
Referenced by configure(), convert(), and showInfo().
◆ m_minOutput
|
private |
Definition at line 25 of file linear_func.h.
Referenced by configure(), convert(), and showInfo().
The documentation for this class was generated from the following files:
- controllers/sensors/converters/linear_func.h
- controllers/sensors/converters/linear_func.cpp
- controllers/sensors/sensor_info_printing.cpp