#include <tc_4.h>
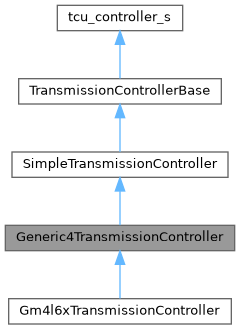
Inheritance diagram for Generic4TransmissionController:
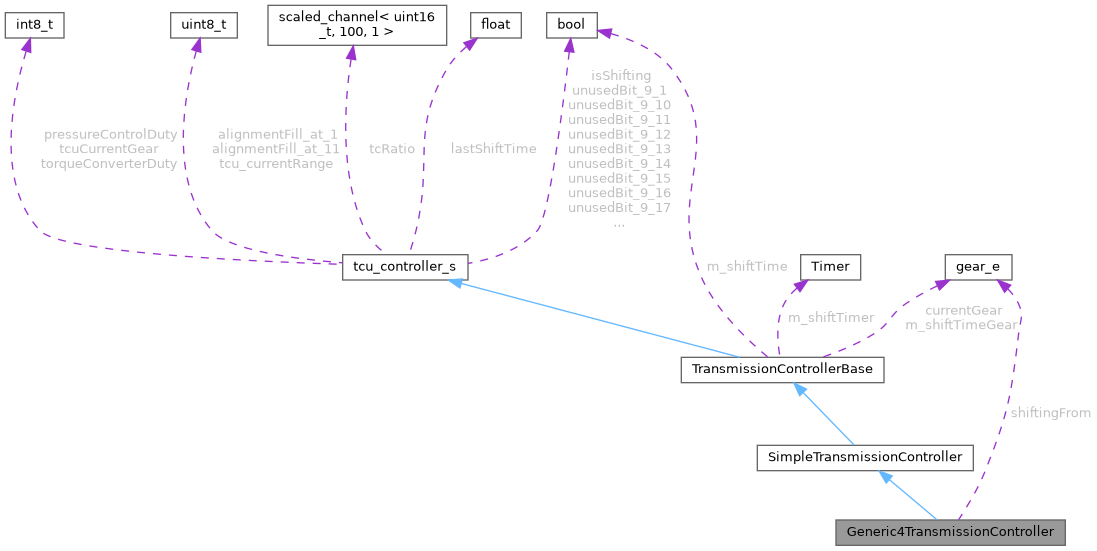
Collaboration diagram for Generic4TransmissionController:
Public Member Functions | |
| void | update (gear_e) |
| void | init () |
| TransmissionControllerMode | getMode () const |
 Public Member Functions inherited from SimpleTransmissionController Public Member Functions inherited from SimpleTransmissionController | |
| void | update (gear_e) |
| void | init () |
| TransmissionControllerMode | getMode () const |
| Public Member Functions inherited from TransmissionControllerBase | |
| virtual gear_e | getCurrentGear () const |
Private Member Functions | |
| void | setTccState (gear_e gear) |
| void | setPcState (gear_e gear) |
Private Attributes | |
| gear_e | shiftingFrom |
Detailed Description
Member Function Documentation
◆ getMode()
|
inlinevirtual |
Reimplemented from TransmissionControllerBase.
Reimplemented in Gm4l6xTransmissionController.
Definition at line 10 of file tc_4.h.
10 {
12 }
@ Generic4
◆ init()
|
virtual |
Reimplemented from TransmissionControllerBase.
Reimplemented in Gm4l6xTransmissionController.
Definition at line 9 of file tc_4.cpp.
9 {
11
12 enginePins.tcuTccOnoffSolenoid.initPin("TCC On/Off Solenoid", engineConfiguration->tcu_tcc_onoff_solenoid, engineConfiguration->tcu_tcc_onoff_solenoid_mode);
13
14 enginePins.tcuPcSolenoid.initPin("Pressure Control Solenoid", engineConfiguration->tcu_pc_solenoid_pin, engineConfiguration->tcu_pc_solenoid_pin_mode);
16 "Line Pressure",
20 0);
21}
void initPin(const char *msg, brain_pin_e brainPin, pin_output_mode_e outputMode, bool forceInitWithFatalError=false)
Definition efi_gpio.cpp:711
static constexpr engine_configuration_s * engineConfiguration
Definition engine_configuration.h:80
void startSimplePwm(SimplePwm *state, const char *msg, Scheduler *executor, OutputPin *output, float frequency, float dutyCycle, pwm_gen_callback *callback)
Definition pwm_generator_logic.cpp:315
output_pin_e tcu_tcc_onoff_solenoid
pwm_freq_t tcu_pc_solenoid_freq
output_pin_e tcu_pc_solenoid_pin
pin_output_mode_e tcu_pc_solenoid_pin_mode
pin_output_mode_e tcu_tcc_onoff_solenoid_mode
static SimplePwm pcPwm("Pressure Control")
Referenced by Gm4l6xTransmissionController::init().
Here is the call graph for this function:
Here is the caller graph for this function:
◆ setPcState()
|
private |
Definition at line 76 of file tc_4.cpp.
76 {
78
79 switch (gear) {
82 break;
85 break;
89 } else {
91 }
92 break;
98 } else {
100 }
101 break;
107 } else {
109 }
110 break;
114 } else {
116 }
117 break;
118 default:
119 break;
120 }
121
122 if (pcts) {
123 pressureControlDuty = interpolate2d(engine->engineState.airflowEstimate, config->tcu_pcAirmassBins, *pcts);
125 }
126}
void setSimplePwmDutyCycle(float dutyCycle) override
Definition pwm_generator_logic.cpp:49
uint8_t tcu_pcVals4[TCU_TABLE_WIDTH]
uint8_t tcu_pcVals23[TCU_TABLE_WIDTH]
scaled_channel< uint8_t, 1, 5 > tcu_pcAirmassBins[TCU_TABLE_WIDTH]
uint8_t tcu_pcValsN[TCU_TABLE_WIDTH]
uint8_t tcu_pcVals1[TCU_TABLE_WIDTH]
uint8_t tcu_pcVals34[TCU_TABLE_WIDTH]
uint8_t tcu_pcVals21[TCU_TABLE_WIDTH]
uint8_t tcu_pcVals3[TCU_TABLE_WIDTH]
uint8_t tcu_pcVals32[TCU_TABLE_WIDTH]
uint8_t tcu_pcVals2[TCU_TABLE_WIDTH]
uint8_t tcu_pcVals43[TCU_TABLE_WIDTH]
uint8_t tcu_pcValsR[TCU_TABLE_WIDTH]
uint8_t tcu_pcVals12[TCU_TABLE_WIDTH]
int8_t pressureControlDuty
Definition tcu_controller_generated.h:40
Referenced by update().
Here is the call graph for this function:
Here is the caller graph for this function:
◆ setTccState()
|
private |
Definition at line 46 of file tc_4.cpp.
46 {
47 // disable if shifting
50 return;
51 }
52
55 if (!tps.Valid || !vss.Valid) {
56 return;
57 }
58 // only enable TC in gear 4
62 if (vss.Value > lockSpeed) {
63 // torqueConverterDuty is only used for a gauge
64 torqueConverterDuty = 100;
66 } else if (vss.Value < unlockSpeed) {
67 torqueConverterDuty = 0;
69 }
70 } else {
71 torqueConverterDuty = 0;
73 }
74}
void setValue(const char *msg, int logicValue, bool isForce=false)
Definition efi_gpio.cpp:604
virtual SensorResult get() const =0
@ VehicleSpeed
@ DriverThrottleIntent
uint8_t tcu_tccUnlockSpeed[8]
uint8_t tcu_tccTpsBins[8]
uint8_t tcu_tccLockSpeed[8]
int8_t torqueConverterDuty
Definition tcu_controller_generated.h:46
Referenced by update().
Here is the call graph for this function:
Here is the caller graph for this function:
◆ update()
|
virtual |
Reimplemented from TransmissionControllerBase.
Reimplemented in Gm4l6xTransmissionController.
Definition at line 23 of file tc_4.cpp.
23 {
27 measureShiftTime(gear);
28 }
29
30 // set torque converter and pressure control state
31 setTccState(gear);
32 setPcState(gear);
33
34 setCurrentGear(gear);
35
36 SimpleTransmissionController::update(gear);
37
39 // 0 means shift is not completed
40 if (time != 0) {
41 lastShiftTime = time;
43 }
44}
virtual gear_e getCurrentGear() const
Definition tcu.cpp:26
virtual gear_e setCurrentGear(gear_e)
Definition tcu.cpp:21
Referenced by Gm4l6xTransmissionController::update().
Here is the call graph for this function:
Here is the caller graph for this function:
Field Documentation
◆ shiftingFrom
|
private |
Definition at line 16 of file tc_4.h.
Referenced by setPcState(), and update().
The documentation for this class was generated from the following files: