|
| bool | init (dc_function_e function, DcMotor *motor, pid_s *pidParameters, const ValueProvider3D *pedalMap) override |
| |
| void | setIdlePosition (percent_t pos) override |
| |
| void | setWastegatePosition (percent_t pos) override |
| |
| void | reset (const char *reason) override |
| |
| void | update () override |
| |
| void | onConfigurationChange (pid_s *previousConfiguration) |
| |
| void | showStatus () |
| |
| expected< percent_t > | observePlant () override |
| |
| expected< percent_t > | getSetpoint () override |
| |
| expected< percent_t > | getSetpointEtb () |
| |
| expected< percent_t > | getSetpointWastegate () const |
| |
| expected< percent_t > | getSetpointIdleValve () const |
| |
| expected< percent_t > | getOpenLoop (percent_t target) override |
| |
| expected< percent_t > | getClosedLoop (percent_t setpoint, percent_t observation) override |
| |
| expected< percent_t > | getClosedLoopAutotune (percent_t setpoint, percent_t actualThrottlePosition) |
| |
| dc_function_e | getFunction () const |
| |
| void | checkJam (percent_t setpoint, percent_t observation) |
| |
| void | setOutput (expected< percent_t > outputValue) override |
| |
| const pid_state_s & | getPidState () const override |
| |
| virtual percent_t | getThrottleTrim (float, percent_t) const |
| |
| float | getCurrentTarget () const override |
| |
| bool | isEtbMode () const override |
| |
| void | setLuaAdjustment (percent_t adjustment) override |
| |
| float | getLuaAdjustment () const |
| |
| virtual void | autoCalibrateTps (bool reportToTs=true) |
| |
| void | update () |
| |
| float | prevOutput = 0 |
| |
| float | targetWithIdlePosition = (float)0 |
| |
| float | trim = (float)0 |
| |
| float | boardEtbAdjustment = (float)0 |
| |
| float | luaAdjustment = (float)0 |
| |
| float | m_wastegatePosition = (float)0 |
| |
| float | m_lastPidDtMs = (float)0 |
| |
| percent_t | etbFeedForward = (percent_t)0 |
| |
| float | integralError = (float)0 |
| |
| float | etbCurrentTarget = (float)0 |
| |
| scaled_channel< int16_t, 100, 1 > | m_adjustedTarget = (int16_t)0 |
| |
| uint8_t | alignmentFill_at_38 [2] = {} |
| |
| bool | etbRevLimitActive: 1 {} |
| |
| bool | jamDetected: 1 {} |
| |
| bool | validPlantPosition: 1 {} |
| |
| bool | unusedBit_14_3: 1 {} |
| |
| bool | unusedBit_14_4: 1 {} |
| |
| bool | unusedBit_14_5: 1 {} |
| |
| bool | unusedBit_14_6: 1 {} |
| |
| bool | unusedBit_14_7: 1 {} |
| |
| bool | unusedBit_14_8: 1 {} |
| |
| bool | unusedBit_14_9: 1 {} |
| |
| bool | unusedBit_14_10: 1 {} |
| |
| bool | unusedBit_14_11: 1 {} |
| |
| bool | unusedBit_14_12: 1 {} |
| |
| bool | unusedBit_14_13: 1 {} |
| |
| bool | unusedBit_14_14: 1 {} |
| |
| bool | unusedBit_14_15: 1 {} |
| |
| bool | unusedBit_14_16: 1 {} |
| |
| bool | unusedBit_14_17: 1 {} |
| |
| bool | unusedBit_14_18: 1 {} |
| |
| bool | unusedBit_14_19: 1 {} |
| |
| bool | unusedBit_14_20: 1 {} |
| |
| bool | unusedBit_14_21: 1 {} |
| |
| bool | unusedBit_14_22: 1 {} |
| |
| bool | unusedBit_14_23: 1 {} |
| |
| bool | unusedBit_14_24: 1 {} |
| |
| bool | unusedBit_14_25: 1 {} |
| |
| bool | unusedBit_14_26: 1 {} |
| |
| bool | unusedBit_14_27: 1 {} |
| |
| bool | unusedBit_14_28: 1 {} |
| |
| bool | unusedBit_14_29: 1 {} |
| |
| bool | unusedBit_14_30: 1 {} |
| |
| bool | unusedBit_14_31: 1 {} |
| |
| uint16_t | etbTpsErrorCounter = (uint16_t)0 |
| |
| uint16_t | etbPpsErrorCounter = (uint16_t)0 |
| |
| int8_t | etbErrorCode = (int8_t)0 |
| |
| int8_t | etbErrorCodeBlinker = (int8_t)0 |
| |
| int8_t | tcEtbDrop = (int8_t)0 |
| |
| uint8_t | alignmentFill_at_51 [1] = {} |
| |
| scaled_channel< uint16_t, 100, 1 > | jamTimer = (uint16_t)0 |
| |
| int8_t | adjustedEtbTarget = (int8_t)0 |
| |
| uint8_t | state = (uint8_t)0 |
| |
| DcMotor * | getMotor () |
| |
| bool | hadTpsError = false |
| |
| bool | hadPpsError = false |
| |
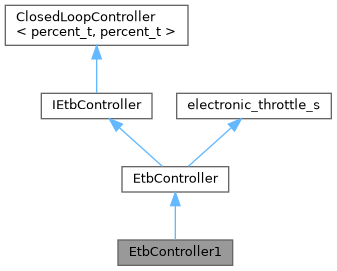
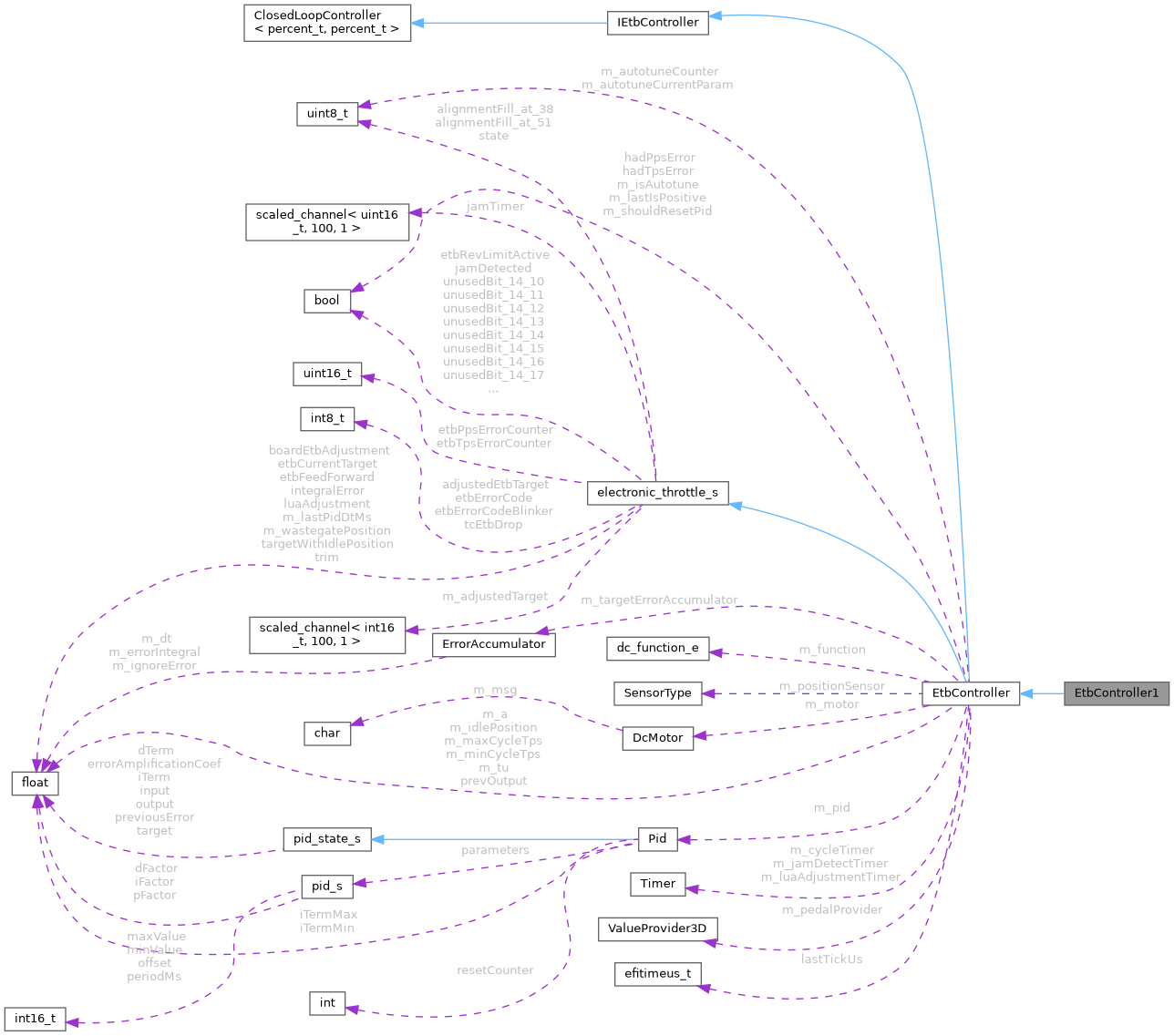
Definition at line 139 of file electronic_throttle_impl.h.
 Public Member Functions inherited from
Public Member Functions inherited from