#include <stepper.h>
Inheritance diagram for DualHBridgeStepper:
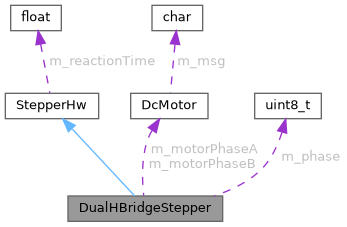
Collaboration diagram for DualHBridgeStepper:
Public Member Functions | |
| void | initialize (DcMotor *motorPhaseA, DcMotor *motorPhaseB, float reactionTime) |
| bool | step (bool positive) override |
| void | sleep () override |
 Public Member Functions inherited from StepperHw Public Member Functions inherited from StepperHw | |
| void | pause (int divisor=1) const |
Protected Member Functions | |
| bool | update (float dutyMult) |
| Protected Member Functions inherited from StepperHw | |
| void | setReactionTime (float ms) |
Private Attributes | |
| DcMotor * | m_motorPhaseA = nullptr |
| DcMotor * | m_motorPhaseB = nullptr |
| uint8_t | m_phase = 0 |
Detailed Description
Member Function Documentation
◆ initialize()
| void DualHBridgeStepper::initialize | ( | DcMotor * | motorPhaseA, |
| DcMotor * | motorPhaseB, | ||
| float | reactionTime | ||
| ) |
Definition at line 37 of file stepper_dual_hbridge.cpp.
38{
39 setReactionTime(reactionTime);
40
41 m_motorPhaseA = motorPhaseA;
42 m_motorPhaseB = motorPhaseB;
43
44 efiAssertVoid(ObdCode::CUSTOM_ERR_ASSERT, engineConfiguration->stepperNumMicroSteps <= maxNumSteps, "stepperNumMicroSteps");
45}
static constexpr engine_configuration_s * engineConfiguration
Definition engine_configuration.h:80
@ CUSTOM_ERR_ASSERT
stepper_num_micro_steps_e stepperNumMicroSteps
Referenced by applyIACposition().
Here is the call graph for this function:

Here is the caller graph for this function:

◆ sleep()
|
overridevirtual |
Reimplemented from StepperHw.
Definition at line 104 of file stepper_dual_hbridge.cpp.
104 {
105 float sleepingCoef = minI(engineConfiguration->stepperMinDutyCycle, engineConfiguration->stepperMaxDutyCycle) * phaseDutyCycleDivisor;
106 update(sleepingCoef);
107 pause();
108}
static constexpr float phaseDutyCycleDivisor
Definition stepper_dual_hbridge.cpp:34
uint8_t stepperMinDutyCycle
uint8_t stepperMaxDutyCycle
Here is the call graph for this function:

◆ step()
Implements StepperHw.
Definition at line 47 of file stepper_dual_hbridge.cpp.
47 {
48 // Check that we've been initialized
50 return false;
51 }
52
56 if (!positive)
57 numStepIncr = -numStepIncr;
60 update(dutyMult);
61 // sleep 1/Nth of the pause time
63 }
64 return true;
65 }
66
67 // For the full-stepping mode, we use a traditional "two phase on" drive model
68 // because "wave drive" (one phase on) method has less torque.
69 // For explanation, pls see: https://github.com/rusefi/rusefi/pull/3213#discussion_r700746453
70
71 // step phase, wrapping
72 if (positive) {
74 } else {
76 }
77
78 update(1.0f);
79 pause();
80
81 return true;
82}
Here is the call graph for this function:

◆ update()
Definition at line 84 of file stepper_dual_hbridge.cpp.
84 {
86 return false;
87 }
88
90 // phase B is 90 degrees shifted
92
93 // Set phases according to the table
96 return true;
97 }
98 // Set phases according to the table
101 return true;
102}
Referenced by sleep(), and step().
Here is the call graph for this function:

Here is the caller graph for this function:
Field Documentation
◆ m_motorPhaseA
|
private |
Definition at line 60 of file stepper.h.
Referenced by initialize(), step(), and update().
◆ m_motorPhaseB
|
private |
Definition at line 61 of file stepper.h.
Referenced by initialize(), step(), and update().
◆ m_phase
|
private |
The documentation for this class was generated from the following files:
- hw_layer/stepper.h
- hw_layer/stepper_dual_hbridge.cpp