#include <serial_can.h>
Inheritance diagram for CanTsListener:
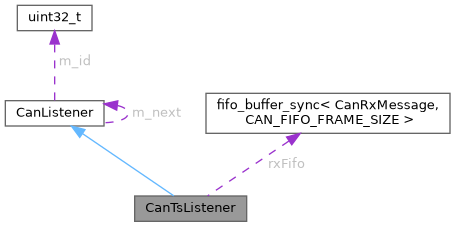
Collaboration diagram for CanTsListener:
Public Member Functions | |
| CanTsListener () | |
| virtual void | decodeFrame (const CANRxFrame &frame, efitick_t nowNt) |
| bool | get (CanRxMessage &item, int timeout) |
 Public Member Functions inherited from CanListener Public Member Functions inherited from CanListener | |
| CanListener (uint32_t id) | |
| CanListener * | processFrame (const size_t busIndex, const CANRxFrame &frame, efitick_t nowNt) |
| uint32_t | getId () |
| void | setNext (CanListener *next) |
| virtual CanListener * | request () |
| bool | hasNext () const |
| virtual bool | acceptFrame (const size_t busIndex, const CANRxFrame &frame) const |
Protected Attributes | |
| fifo_buffer_sync< CanRxMessage, CAN_FIFO_FRAME_SIZE > | rxFifo |
Additional Inherited Members |
Detailed Description
Definition at line 111 of file serial_can.h.
Constructor & Destructor Documentation
◆ CanTsListener()
|
inline |
Definition at line 113 of file serial_can.h.
Member Function Documentation
◆ decodeFrame()
|
virtual |
incoming data main entry point
Implements CanListener.
Definition at line 361 of file serial_can.cpp.
361 {
362 // CAN ID filtering happens in base class, by the time we are here we know it's the CAN_ECU_SERIAL_RX_ID packet
363 // todo: what if the FIFO is full?
364 CanRxMessage msg(frame);
367 }
370 }
371}
Definition serial_can.h:95
fifo_buffer_sync< CanRxMessage, CAN_FIFO_FRAME_SIZE > rxFifo
Definition serial_can.h:125
static constexpr engine_configuration_s * engineConfiguration
Definition engine_configuration.h:80
@ CUSTOM_ERR_CAN_COMMUNICATION
bool verboseIsoTp
Here is the call graph for this function:

◆ get()
|
inline |
Definition at line 120 of file serial_can.h.
Referenced by CanStreamer::receive().
Here is the caller graph for this function:

Field Documentation
◆ rxFifo
|
protected |
Definition at line 125 of file serial_can.h.
Referenced by decodeFrame(), and get().
The documentation for this class was generated from the following files:
- console/binary/serial_can.h
- console/binary/serial_can.cpp