#include <can_sensor.h>
Inheritance diagram for CanSensorBase:

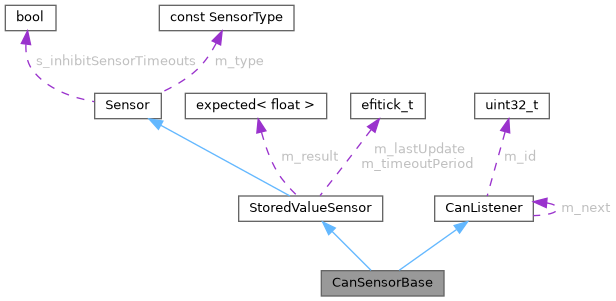
Collaboration diagram for CanSensorBase:
Public Member Functions | |
| CanSensorBase (uint32_t eid, SensorType type, efidur_t timeout) | |
| void | showInfo (const char *sensorName) const override |
 Public Member Functions inherited from StoredValueSensor Public Member Functions inherited from StoredValueSensor | |
| SensorResult | get () const final override |
| StoredValueSensor (SensorType type, efidur_t timeoutNt) | |
| void | invalidate () |
| void | invalidate (UnexpectedCode why) |
| void | setValidValue (float value, efitick_t timestamp) |
| void | showInfo (const char *sensorName) const override |
| virtual void | setTimeout (int timeoutMs) |
| Public Member Functions inherited from Sensor | |
| bool | Register () |
| const char * | getSensorName () const |
| virtual bool | hasSensor () const |
| virtual float | getRaw () const |
| virtual bool | isRedundant () const |
| void | unregister () |
| SensorType | type () const |
| Public Member Functions inherited from CanListener | |
| CanListener (uint32_t id) | |
| CanListener * | processFrame (const size_t busIndex, const CANRxFrame &frame, efitick_t nowNt) |
| uint32_t | getId () |
| void | setNext (CanListener *next) |
| virtual CanListener * | request () |
| bool | hasNext () const |
| virtual bool | acceptFrame (const size_t busIndex, const CANRxFrame &frame) const |
Additional Inherited Members | |
| Static Public Member Functions inherited from Sensor | |
| static void | showAllSensorInfo () |
| static void | showInfo (SensorType type) |
| static void | resetRegistry () |
| static const Sensor * | getSensorOfType (SensorType type) |
| static SensorResult | get (SensorType type) |
| static float | getOrZero (SensorType type) |
| static float | getRaw (SensorType type) |
| static bool | isRedundant (SensorType type) |
| static bool | hasSensor (SensorType type) |
| static void | setMockValue (SensorType type, float value, bool mockRedundant=false) |
| static void | setInvalidMockValue (SensorType type) |
| static void | resetMockValue (SensorType type) |
| static void | resetAllMocks () |
| static void | inhibitTimeouts (bool inhibit) |
| static const char * | getSensorName (SensorType type) |
| Protected Member Functions inherited from Sensor | |
| Sensor (SensorType type) | |
| Protected Member Functions inherited from CanListener | |
| virtual void | decodeFrame (const CANRxFrame &frame, efitick_t nowNt)=0 |
| Static Protected Attributes inherited from Sensor | |
| static bool | s_inhibitSensorTimeouts = false |
Detailed Description
Sensor which reads it's value from CAN
Definition at line 20 of file can_sensor.h.
Constructor & Destructor Documentation
◆ CanSensorBase()
|
inline |
Definition at line 22 of file can_sensor.h.
24 , CanListener(eid)
25 {
26 }
Definition can_listener.h:12
Base class for sensors that compute a value on one thread, and want to make it available to consumers...
Definition stored_value_sensor.h:30
Member Function Documentation
◆ showInfo()
|
overridevirtual |
Implements Sensor.
Definition at line 44 of file sensor_info_printing.cpp.
44 {
46 efiPrintf("CAN Sensor \"%s\": valid: %s value: %.2f", sensorName, boolToString(value.Valid), value.Value);
47}
Here is the call graph for this function:

The documentation for this class was generated from the following files:
- controllers/sensors/can_sensor.h
- controllers/sensors/sensor_info_printing.cpp