#include <boost_control.h>
Public Member Functions | |
| void | init (IPwm *const pmw, const ValueProvider3D *const openLoopMap, const ValueProvider3D *const closedLoopTargetMap, const ValueProvider2D &cltMultiplierProvider, const ValueProvider2D &iatMultiplierProvider, const ValueProvider2D &cltAdderProvider, const ValueProvider2D &iatAdderProvider, pid_s *const pidParams) |
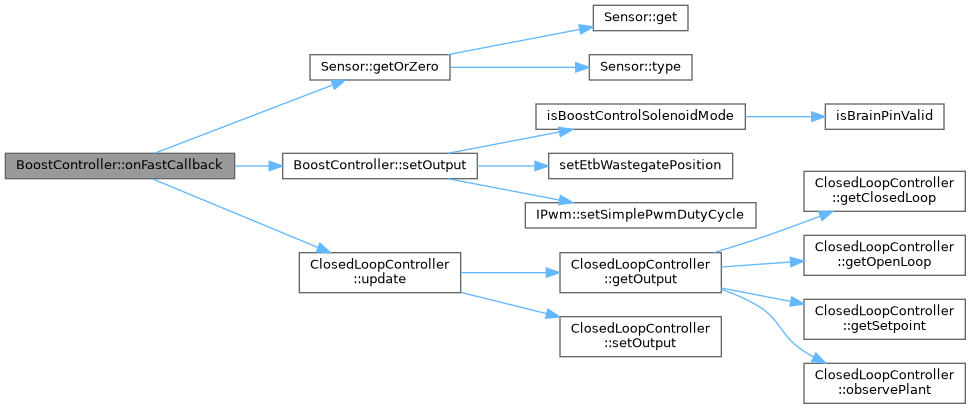
| void | onFastCallback () override |
| void | setDefaultConfiguration () override |
| void | resetLua () |
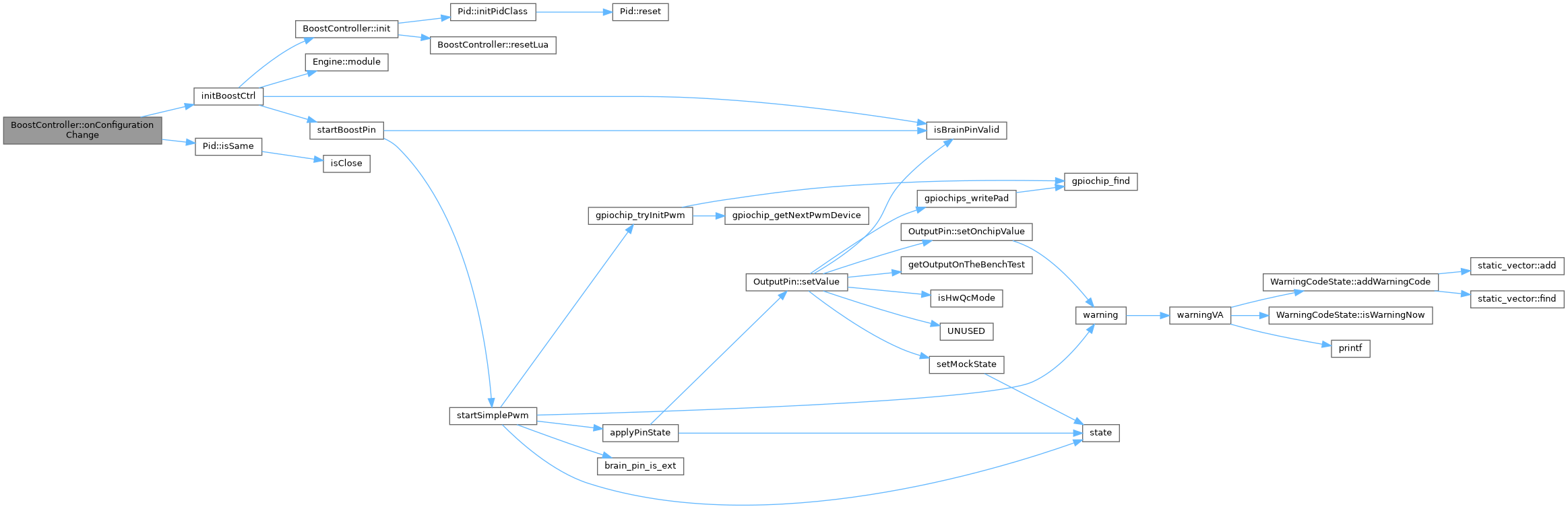
| void | onConfigurationChange (engine_configuration_s const *previousConfig) override |
| expected< float > | observePlant () override |
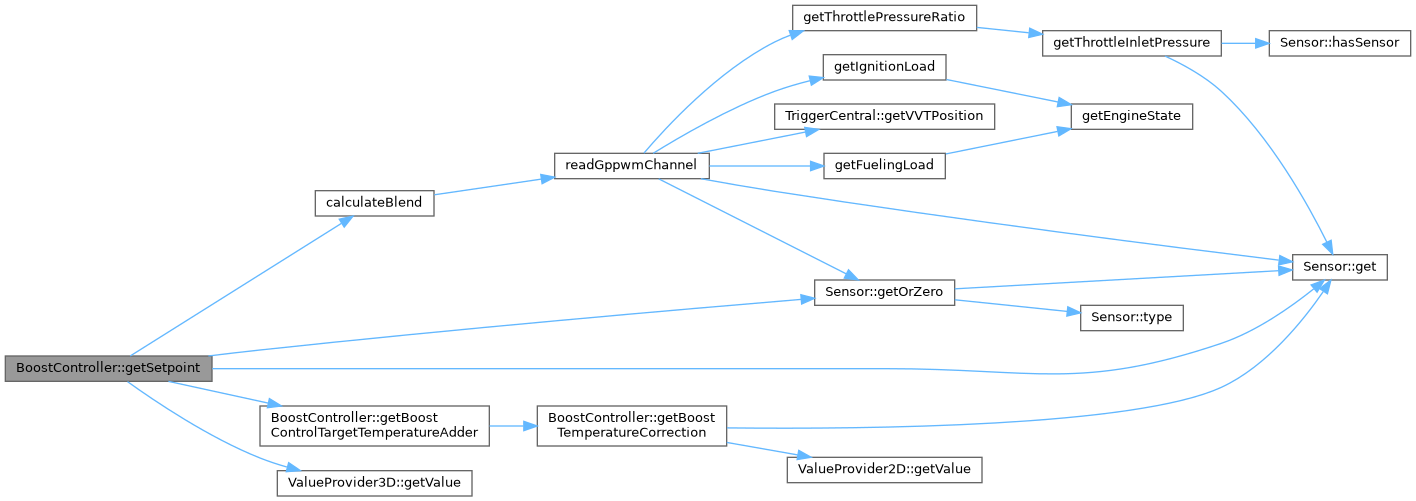
| expected< float > | getSetpoint () override |
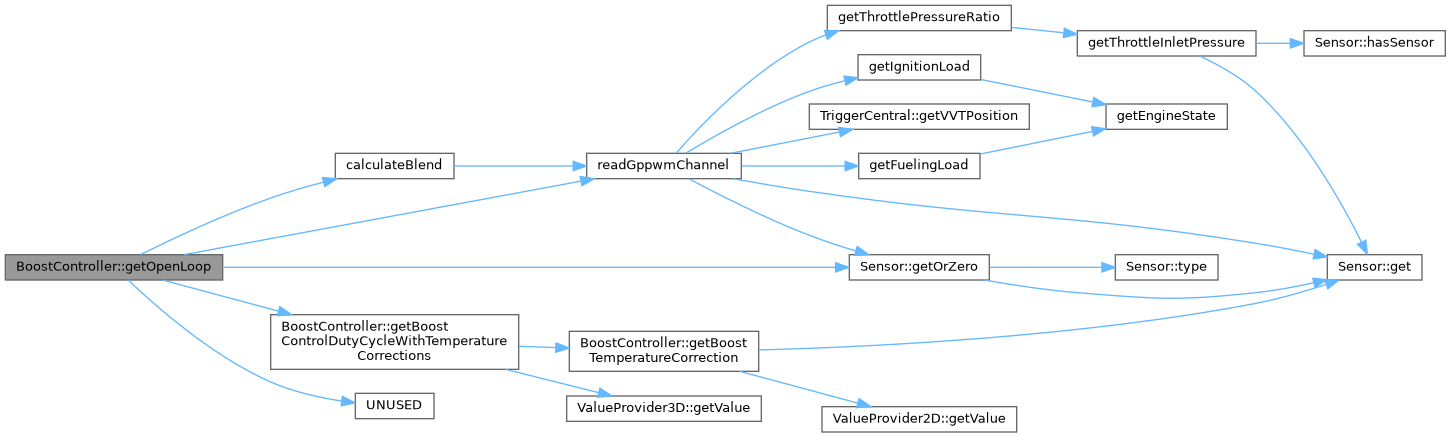
| expected< percent_t > | getOpenLoop (float target) override |
| expected< percent_t > | getClosedLoop (float target, float manifoldPressure) override |
| void | setOutput (expected< percent_t > outputValue) override |
 Public Member Functions inherited from EngineModule Public Member Functions inherited from EngineModule | |
| virtual void | initNoConfiguration () |
| virtual void | onSlowCallback () |
| virtual void | onEngineStop () |
| virtual void | onIgnitionStateChanged (bool) |
| virtual bool | needsDelayedShutoff () |
| virtual void | onEnginePhase (float, efitick_t, angle_t, angle_t) |
| Public Member Functions inherited from ClosedLoopController< float, percent_t > | |
| void | update () |
Private Member Functions | |
| percent_t | getClosedLoopImpl (float target, float manifoldPressure) |
| float | getBoostControlDutyCycleWithTemperatureCorrections (const float rpm, const float driverIntent) const |
| std::optional< float > | getBoostControlTargetTemperatureAdder () const |
| std::optional< float > | getBoostTemperatureCorrection (const SensorType sensorType, const ValueProvider2D &correctionCurve) const |
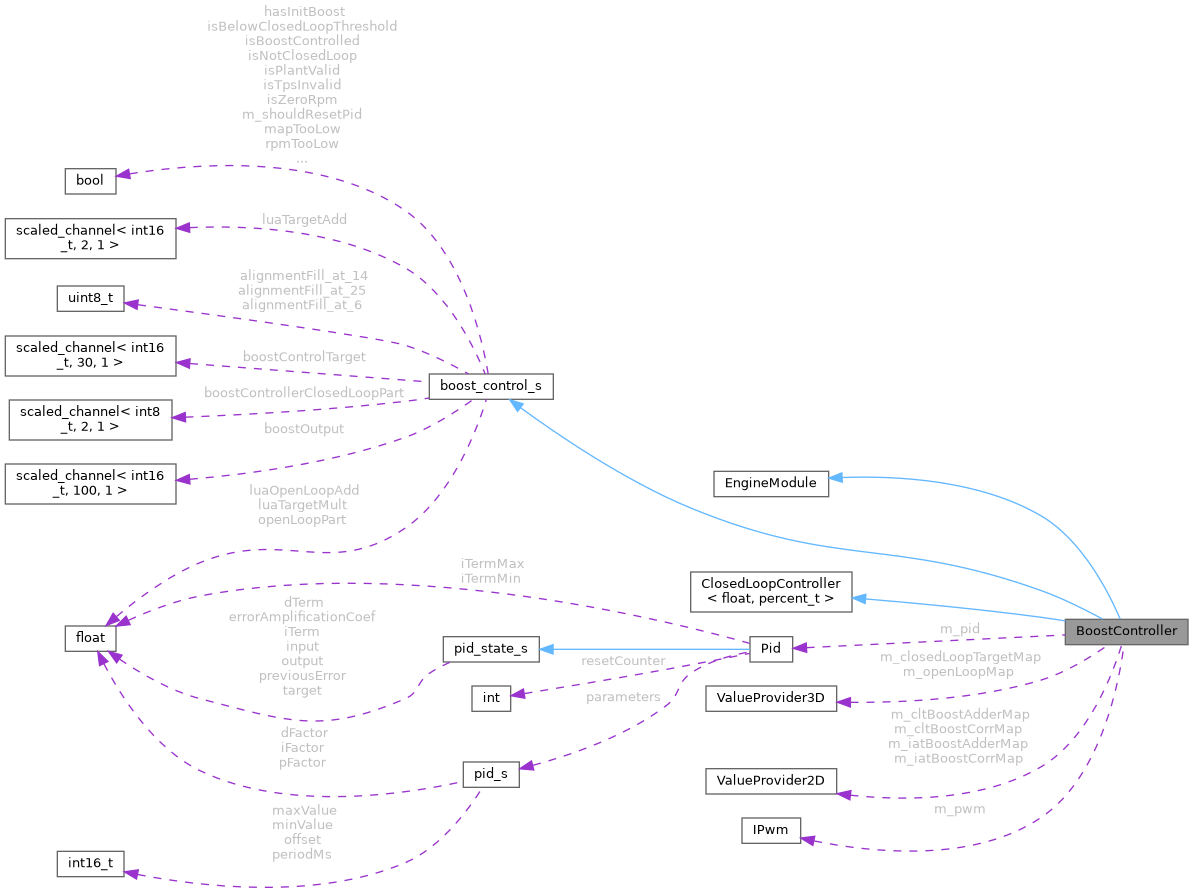
Private Attributes | |
| Pid | m_pid |
| const ValueProvider3D * | m_openLoopMap = nullptr |
| const ValueProvider3D * | m_closedLoopTargetMap = nullptr |
| const ValueProvider2D * | m_cltBoostCorrMap = nullptr |
| const ValueProvider2D * | m_iatBoostCorrMap = nullptr |
| const ValueProvider2D * | m_cltBoostAdderMap = nullptr |
| const ValueProvider2D * | m_iatBoostAdderMap = nullptr |
| IPwm * | m_pwm = nullptr |
Detailed Description
Definition at line 17 of file boost_control.h.
Member Function Documentation
◆ getBoostControlDutyCycleWithTemperatureCorrections()
|
private |
Definition at line 197 of file boost_control.cpp.
Referenced by getOpenLoop().


◆ getBoostControlTargetTemperatureAdder()
|
private |
Definition at line 213 of file boost_control.cpp.
Referenced by getSetpoint().


◆ getBoostTemperatureCorrection()
|
private |
Definition at line 226 of file boost_control.cpp.
Referenced by getBoostControlDutyCycleWithTemperatureCorrections(), and getBoostControlTargetTemperatureAdder().


◆ getClosedLoop()
|
overridevirtual |
Implements ClosedLoopController< float, percent_t >.
Definition at line 241 of file boost_control.cpp.
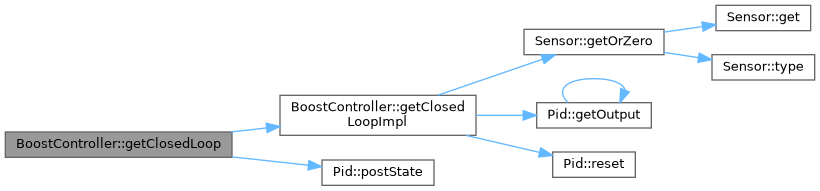
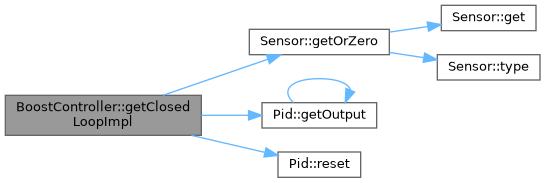
◆ getClosedLoopImpl()
Definition at line 167 of file boost_control.cpp.
Referenced by getClosedLoop().

◆ getOpenLoop()
Implements ClosedLoopController< float, percent_t >.
Definition at line 125 of file boost_control.cpp.
◆ getSetpoint()
|
overridevirtual |
Implements ClosedLoopController< float, percent_t >.
Definition at line 81 of file boost_control.cpp.
◆ init()
| void BoostController::init | ( | IPwm *const | pmw, |
| const ValueProvider3D *const | openLoopMap, | ||
| const ValueProvider3D *const | closedLoopTargetMap, | ||
| const ValueProvider2D & | cltMultiplierProvider, | ||
| const ValueProvider2D & | iatMultiplierProvider, | ||
| const ValueProvider2D & | cltAdderProvider, | ||
| const ValueProvider2D & | iatAdderProvider, | ||
| pid_s *const | pidParams | ||
| ) |
Definition at line 31 of file boost_control.cpp.
Referenced by initBoostCtrl().


◆ observePlant()
|
overridevirtual |
Implements ClosedLoopController< float, percent_t >.
Definition at line 71 of file boost_control.cpp.

◆ onConfigurationChange()
|
overridevirtual |
Reimplemented from EngineModule.
Definition at line 61 of file boost_control.cpp.
◆ onFastCallback()
|
overridevirtual |
Reimplemented from EngineModule.
Definition at line 277 of file boost_control.cpp.
◆ resetLua()
| void BoostController::resetLua | ( | ) |
Definition at line 55 of file boost_control.cpp.
Referenced by init().

◆ setDefaultConfiguration()
|
overridevirtual |
Reimplemented from EngineModule.
Definition at line 391 of file boost_control.cpp.
◆ setOutput()
|
overridevirtual |
Implements ClosedLoopController< float, percent_t >.
Definition at line 255 of file boost_control.cpp.
Referenced by onFastCallback().

Field Documentation
◆ m_closedLoopTargetMap
|
private |
Definition at line 60 of file boost_control.h.
Referenced by getSetpoint(), and init().
◆ m_cltBoostAdderMap
|
private |
Definition at line 63 of file boost_control.h.
Referenced by getBoostControlTargetTemperatureAdder(), and init().
◆ m_cltBoostCorrMap
|
private |
Definition at line 61 of file boost_control.h.
Referenced by getBoostControlDutyCycleWithTemperatureCorrections(), getOpenLoop(), and init().
◆ m_iatBoostAdderMap
|
private |
Definition at line 64 of file boost_control.h.
Referenced by getBoostControlTargetTemperatureAdder(), and init().
◆ m_iatBoostCorrMap
|
private |
Definition at line 62 of file boost_control.h.
Referenced by getBoostControlDutyCycleWithTemperatureCorrections(), getOpenLoop(), and init().
◆ m_openLoopMap
|
private |
Definition at line 59 of file boost_control.h.
Referenced by getBoostControlDutyCycleWithTemperatureCorrections(), getOpenLoop(), and init().
◆ m_pid
|
private |
Definition at line 57 of file boost_control.h.
Referenced by getClosedLoop(), getClosedLoopImpl(), init(), onConfigurationChange(), and onFastCallback().
◆ m_pwm
|
private |
Definition at line 65 of file boost_control.h.
Referenced by init(), and setOutput().
The documentation for this class was generated from the following files:
- controllers/actuators/boost_control.h
- controllers/actuators/boost_control.cpp