Functions | |
| void | canDashboardNissanVQ (CanCycle cycle) |
Function Documentation
◆ canDashboardNissanVQ()
| void canDashboardNissanVQ | ( | CanCycle | cycle | ) |
Definition at line 53 of file can_dash_nissan.cpp.
53 {
54 static int rollingId = 0;
55
57 {
60 }
61
62 {
64
66 msg[0] = clt + 45;
67 }
68
69
70 {
72
73 rollingId = (rollingId + 1) % 4;
74 const uint8_t magicByte[4] = {0x03, 0x23, 0x42, 0x63};
75
76 msg[0] = magicByte[rollingId];
78
79 // thank you "102 CAN Communication decoded"
80#define CAN_23D_RPM_MULT 3.15
82 msg.setShortValue(rpm315, /*offset*/ 3);
83
84 msg[7] = 0x70; // todo: CLT decoding?
85 }
86 }
87}
@ _50ms
@ NBC
@ OBD
Definition can_msg_tx.h:32
static CCM_OPTIONAL FunctionalSensor clt(SensorType::Clt, MS2NT(10))
@ AcceleratorPedal
@ Clt
@ Rpm
Referenced by updateDash().
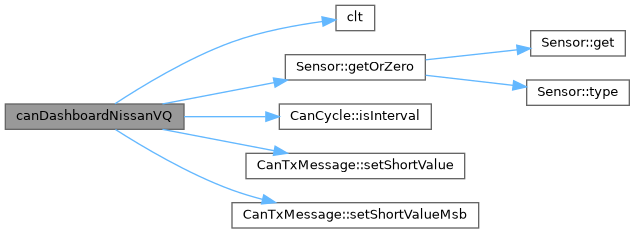
Here is the call graph for this function:
Here is the caller graph for this function:
